一种智能带电绝缘材料涂覆均匀的方法与流程
1.本发明属于控制领域,尤其涉及一种用于架空裸导线绝缘材料带电涂覆的控制 方法。
背景技术:
2.绝缘涂料涂覆机器人(简称涂覆机器人或机器人)主要应用于配电架空线路裸 导线局部或全线路带电操作绝缘化技术改造,与现有的配电线路绝缘化改造相比, 不受停电、环境约束,有效解决绝缘化改造与停电的难题,在改造时间及资金投入 方面都大幅节省。
3.但是现有技术中,针对于绝缘涂料机器人在不同环境的涂覆并不具有针对性, 尤其是面对较为老化的线路以及紧急涂覆情况下,老化线路本身即具有一定的环境 影响,在涂覆流程中一旦如北方的灰尘较多的恶劣环境下,仅普通的涂覆料在干化 后将与灰尘混合,而灰尘本身即具有剥离性质,因此最终将在风力较强的区域形成 绝缘面整体受横向荷载剥离,影响涂覆后绝缘涂料的均匀度和附着牢固程度。
4.同时,而针对于雨水天气,如南方较为潮湿的环境中,其架空线路裸导线本身 表面会因为温差导致露珠聚集,在未有擦干的情况下所喷涂的涂料在未干化之前将 与露水混合,少部分将自然滴落并聚集于线路底部,最终形成顶部的绝缘面较薄且 底部较厚的状况,严重时将引起整体线路的重力荷载增加。
5.此外,绝缘涂料机器人喷涂的效果会受环境影响,比如需要喷涂的架空线有灰 尘、结块,或者喷涂当天空气湿度比较大,架空线上有水汽、水珠等,这些外界影 响因素都会造成喷涂不均匀,导致二次返工,影响工作效率。
技术实现要素:
6.本发明所要解决的技术问题是提供一种智能带电绝缘材料涂覆均匀的方法。其 首先检测裸导线的施工环境,针对不同的施工环境和工作场景,对待涂覆裸导线的 表面采用不同的清洁措施,可有效保障喷涂机器人适应不同工作场景,保障架空线 绝缘材料喷涂均匀,确保涂覆后绝缘涂料的均匀度和附着牢固程度,提高作业质量 和工作效率。
7.本发明的技术方案是:提供一种智能带电绝缘材料涂覆均匀的方法,包括采用 涂覆机器人对架空裸导线进行绝缘涂料的喷涂,其特征是:
8.1)在涂覆机器人上用于喷涂绝缘涂料的喷嘴前方,设置一组吹扫装置,用于 对待喷涂裸导线的表面进行“吹扫”式清洁,利用高压气流将架空线上的积尘和水 渍吹掉,从而保障待喷涂裸导线表面的干净整洁;
9.2)在喷嘴的前、后方,分别设置一个摄像头,用于拍摄“喷涂”操作前、后 架空裸导线的表面情况图像,并将图像实时传输至地面控制中心,供喷涂操作人员 实时观看;
10.3)将架空裸导线的表面情况图像传输至就地控制中心,存储“喷涂”操作前、 后架空裸导线图像;
11.4)比较不同时刻“喷涂”操作后的架空裸导线图像,进行喷涂效果确认;
12.5)根据不同时刻“喷涂”操作后的架空裸导线图像的比较结果,控制和适度 调整涂覆机器人的行走速度。
13.具体的,所述的吹扫装置由支架、高压气瓶、气路开关、进口管和风嘴构成; 其中,支架设置在涂覆机器的本体或行走机构上,支架上设置有高压气瓶和气路开 关,高压气瓶和气路开关经进口管连接风嘴;风嘴环绕待喷涂的裸导线设置;气路 开关的控制端与机器人控制系统连接,可通过手持终端远程进行气路开关的通、断 控制或气体流量的调节。
14.进一步的,所述的风嘴为环状风嘴。
15.更进一步的,所述风嘴在待喷涂裸导线喷涂区域的停留时间为5秒。
16.具体的,将所述不同时刻“喷涂”操作后的架空裸导线图像进行比较,进行喷 涂效果确认。
17.进一步的,所述的喷涂效果确认,包括通过公式计算判断哪块区域出现了“涂 薄”现象;
18.所述的公式为:
[0019][0020]
式中,s1表示t1时刻“喷涂”操作后架空导线图像所占的面积;s2表示t2时 刻“喷涂”操作后架空导线图像所占的面积;t1小于t2;s
12
表示相邻两帧疑似问 题区域中s1和s2的面积变化率。
[0021]
更进一步的,所述的面积变化率在
±
5%范围内,不会影响涂喷涂质量。
[0022]
具体的,当所述的面积变化率大于5%时,需要减少涂覆机器人的行走速度; 当所述的面积变化率小于5%时,需要增加涂覆机器人的行走速度;当所述的面积 变化率在
±
5%范围内时,保持涂覆机器人的行走速度不变。
[0023]
与现有技术比较,本发明的优点是:
[0024]
本发明的技术方案,针对不同的施工环境和工作场景,对待涂覆裸导线的表面 采用不同的清洁措施,可有效保障喷涂机器人适应不同工作场景,保障架空线绝缘 材料喷涂均匀,确保涂覆后绝缘涂料的均匀度和附着牢固程度,提高作业质量和工 作效率。
附图说明
[0025]
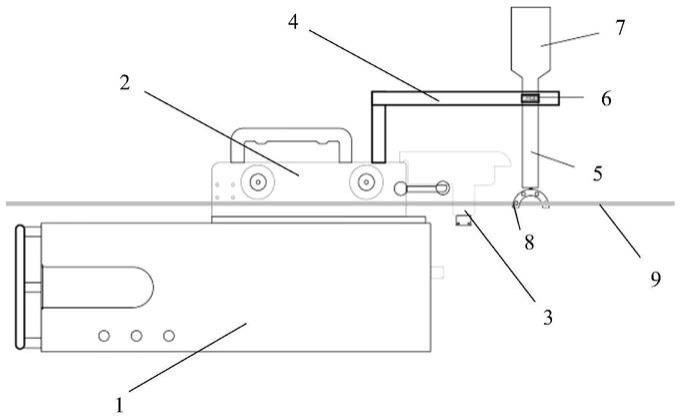
图1是本发明吹扫装置的结构示意图。
[0026][0027]
图中1为涂覆机器人本体,2为行走机构,3为喷嘴,4为支架,5为进口管, 6为气路开关,7为高压气瓶,8为喷嘴,9为待喷涂裸导线。
具体实施方式
[0028]
下面结合附图和实施例对本发明做进一步说明。
[0029]
涂覆机器人包含了涂覆系统、位移系统、电源系统和控制系统,为了保障架空 线喷涂均匀,本发明的技术方案,提供了一种绝缘材料涂覆均匀的方法,具体介绍 如下:
[0030]
1)如何保障需喷涂的裸露架空线没有灰尘和水珠?
[0031]
每次喷涂之前,需要对所需喷涂的架空线进行勘察,这里可以分为三种场景: 线路崭新良好、线路老化积尘、线路有水渍。
[0032]
在灰尘较多的恶劣环境下,普通的涂覆料在干化后将与灰尘混合,而灰尘本身 即具有剥离性质,因此最终将在风力较强的区域形成绝缘面整体受横向荷载剥离, 影响涂覆后的效果。
[0033]
在潮湿的环境中,其线路本身表面会因为温差导致露珠聚集,在未有擦干的情 况下所喷涂的涂料在未干化之前将与露水混合,少部分将自然滴落并聚集于线路底 部,最终形成顶部的绝缘面较薄且底部较厚的状况,严重时将引起整体线路的重力 荷载增加。
[0034]
而线路崭新良好,绝缘材料在裸导线的贴附性比较好,没有以上问题,所以只 要解决老化线路上的积尘和水渍就可以解决该问题。
[0035]
为此,在涂覆机器人上用于喷涂绝缘涂料的喷嘴前方,设置一组吹扫装置,用 于对待喷涂裸导线的表面进行“吹扫”式清洁。
[0036]
具体的,如图1中所示,涂覆机器人在其本体1处设置一根支架4(图中以设 置在行走机构2上的l型支架为例),支架上设置有高压气瓶6和气路开关7,气 路开关的控制端与机器人控制系统连接,可通过手持终端远程进行气路开关的通、 断控制和气体流量的调节。
[0037]
高压气瓶和气路开关经进口管5连接风嘴8,风嘴环绕待喷涂的裸导线9设置。
[0038]
通过环形风嘴,可以利用高压气流将架空线上的积尘和水渍吹掉,从而保障了 待喷涂裸导线表面的干净整洁。
[0039]
2)如何保障喷涂覆盖均匀?
[0040]
在涂覆机器人喷嘴3的前方和后方,分别设置一个摄像头,用于拍摄喷涂操作 前、后的架空裸导线的图像。
[0041]
①
控制终端远程打开摄像头,查看裸导线状态;
[0042]
②
控制终端远程打开高压气瓶出气口处的气路开关,高压气体通过进口管连接 到环形风嘴,借助高压气体“风”将架空裸导线表面上的积尘或积水清除;同时可 通过第
①
步查看裸导线状态。
[0043]
③
保障裸导线的清洁度,风力吹嘴的区域停留时间为5s,涂覆喷嘴的停留时间 为8s,且停留时间的长短,还受环形风嘴的结构,以及根据架空导线待喷涂线段的 角度与水平线的夹角,来进行进一步的调节。
[0044]
④
喷涂效果确认:除了摄像头查看喷涂效果,也可以通过公式计算判断哪块区 域出现了绝缘涂层“涂薄”现象,公式为:
[0045][0046]
式中,s1表示t1时刻“喷涂”操作后架空导线图像所占的面积;s2表示t2时 刻“喷涂”操作后架空导线图像所占的面积;t1小于t2;s
12
表示相邻两帧疑似问 题区域中s1和s2的面积变化率,max(s1,s2)表示t1和t2时刻“喷涂”操作后 所拍摄架空导线图像的总面积,即拍摄所得到的整体架空裸导线图像的面积。
[0047]
经过实际大量测试,变化率在
±
5%范围内,不会影响涂喷涂质量。现场操控人 员
可根据机器人回传的变化率,调整机器人的前进速度,从而再次保障喷涂的最终 效果。
[0048]
具体的,当所述的面积变化率大于5%时,需要减少涂覆机器人的行走速度; 当所述的面积变化率小于5%时,需要增加涂覆机器人的行走速度;当所述的面积 变化率在
±
5%范围内时,保持涂覆机器人的行走速度不变即可。
[0049]
本发明的技术方案,采用高压风对待喷涂导线进行预清洁,同时采集喷涂后架 空导线的图像,根据采集到的图像进行比较,依据不同时刻的图像,得到被喷涂导 线在图像中的面积,进而获取喷涂效果的判定,并以此来进行喷涂速度和涂覆机器 人的行走速度的调节。
[0050]
本发明可广泛用于带电绝缘喷涂机器人的设计、制造和施工控制领域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1