餐具回收分离机构的制作方法
1.本实用新型涉及回收机构,具体涉及餐具回收分离机构。
背景技术:
2.餐厅人来人往,每天都会产生的大量装有剩食的餐具需要进行处理,如果采用人工处理的方式则成本较大,而采用餐具回收分离机构来对碗盘和勺筷进行回收和分离则可以节省成本。现有的餐具回收分离机构如专利文献cn109567714a所示,其通过传送机构把回收的餐具传送经过磁性转盘下方,磁性转盘吸附起餐盘上的金属勺子从而从装有金属勺子的餐盘中分离出金属勺子。但在实际操作过程中,磁性转盘距离金属勺子越远,其对金属勺子的磁吸力也就越弱,而磁性转盘与传送机构之间要保持一定的距离供碗盘通过。在回收的餐碗碗沿较高的状态下,磁性转盘与传送带之间就需要保持较远的距离供餐碗通过,因为餐盘和餐碗这类食物容器是放置在传送机构上的,所以此状态下磁性转盘距离放置在餐盘上的金属勺子的距离也比较远,导致磁吸力较弱从而无法吸附起金属勺子。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种餐具回收分离机构,其在回收的餐碗碗沿较高的情况下能够从回收的食物容器中分离出细小餐具。
4.为解决上述技术问题,本实用新型的餐具回收分离机构,包括传送机构和位于传送机构上方的磁吸机构,传送机构接收装有细小餐具的食物容器,并将食物容器传送到末端,传送途经磁吸机构下方,磁吸机构吸附起经过其下方的食物容器中的细小餐具;包括磁吸升降机构,磁吸升降机构驱动磁吸机构下降进行吸附,磁吸升降机构驱动磁吸机构上升从而把所吸附的细小餐具带离食物容器。
5.更进一步地,所述传送机构是传送带。
6.更进一步地,所述传送带下方设有细小餐具回收容器,所述传送带是滚筒传送带,其相邻两个滚筒之间设有掉落口,在传送带把食物容器传送到末端的状态下,磁吸机构解除吸附以使得被带离食物容器的细小餐具从所述掉落口中掉入细小餐具回收容器内。
7.更进一步地,所述细小餐具回收容器是勺子和/或筷子回收容器。
8.更进一步地,所述磁吸机构是电磁铁。
9.更进一步地,包括安装在磁吸升降机构上的摄像头,其对经过磁吸机构下方的食物容器进行监测以识别该食物容器中是否装有细小餐具。
10.更进一步地,传送机构具体系将横向并排的多个食物容器纵向传送到末端;餐具回收分离机构包括磁吸侧移机构,磁吸侧移机构驱动磁吸机构横向移动。
11.更进一步地,所述磁吸侧移机构、磁吸升降机构和磁吸机构共同组成磁吸组件;本餐具回收分离机构有多个磁吸组件。
12.在传送机构传送装有细小餐具的食物容器经过磁吸机构下方的状态下,用户让磁吸升降机构驱动磁吸机构往下运动到一个比较接近食物容器的预设高度,如此则可以缩小
磁吸机构与食物容器上的细小餐具的距离,也就可以增强磁吸机构对细小餐具的磁吸力,因此即使回收的餐碗碗沿较高,用户仍然只需要让磁吸机构往下运动到预设高度,就可以使磁吸机构保持比较大的磁吸力从而吸附细小餐具了。
附图说明
13.图1是餐具回收分离装置的轴测图。
14.图2是餐具回收分离装置的局部放大图,图中拆去了餐具回收分离机构的外壳和机架,且电磁铁对餐盘上的勺子和筷子进行吸附。
15.图3是餐具回收分离装置的局部放大图,图中拆去了餐具回收分离机构的外壳和机架,且电磁铁停止对勺子和筷子的吸附。
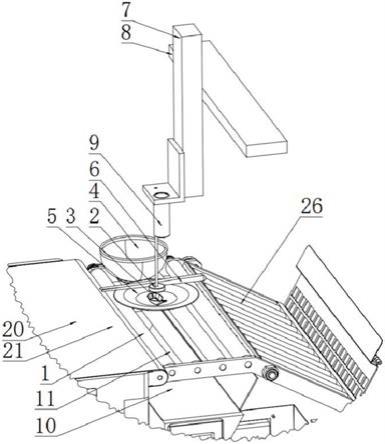
16.图4是餐具回收分离机构的轴测图,图中拆去了外壳和机架。
具体实施方式
17.以下结合具体实施方式对本发明创造作进一步详细说明。
18.见图1,本实施例里,以箭头c所指的方向为前,以箭头a所指的方向为左,以箭头b所指的方向为右。餐具回收分离装置包括餐桌21和位于餐桌21前方的餐具回收分离机构22,餐桌21设有作为桌面的输送带20,用户可在输送带20上用餐。用户用餐完成之后,在输送带20上留下了两个分别装有细小餐具的食物容器,如图1所示,其中一个是搪瓷餐盘5,另一个是搪瓷餐碗4。餐盘5上装有金属勺子3和金属筷子6,餐碗4上装有金属勺子3,金属勺子3和金属筷子6都可被磁铁吸附。餐盘5和餐碗4都放在输送带20左侧。输送带20前端为其传送方向上的末端,输送带20将餐盘5和餐碗4往前输送到输送带20前端。餐具回收分离机构22在输送带20前端承接被输送的餐盘5和餐碗4。
19.餐具回收分离机构22(见图1)内部见图2,其设有滚筒传送带1,滚筒传送带1后端邻近输送带20前端从而承接被输送到输送带20前端的餐盘5和餐碗4。滚筒传送带1上方设有电磁铁2,电磁铁2固定安装在磁吸升降机构7上,磁吸升降机构7固定安装在磁吸侧移机构8上,磁吸升降机构7可以驱动电磁铁2做上下运动,磁吸侧移机构8驱动磁吸升降机构7和电磁铁2做左右方向的往复运动。
20.见图2,滚筒传送带1前端为其传送方向上的末端,餐具回收分离机构22(见图1)在滚筒传送带1前方设有多根碗盘暂存辊轴26。餐具回收分离机构22设有滚筒驱动机构(图中未示出),在滚筒传送带1承接餐盘5和餐碗4之后,滚筒驱动机构驱动滚筒传送带1运动,滚筒传送带1就作为传送机构,把餐盘5和餐碗4往前传送到碗盘暂存辊轴26上,即滚筒传送带1将餐盘5和餐碗4传送到其末端。以前后方向为纵向,以左右方向为横向,那么滚筒传送带1纵向传送餐盘5和餐碗4,由图1和图2可知,餐盘5和餐碗4是横向并排的,餐盘5和餐碗4就会并排经过电磁铁2下方。磁性侧移机构8驱动磁吸升降机构7和电磁铁2做左右方向的往复运动,也就是在餐盘5和餐碗4并排经过电磁铁2下方的过程中,磁吸升降机构7和电磁铁2也会在餐盘5和餐碗4上方做横向移动从而先后到达餐盘5和餐碗4上方。磁吸升降机构7上还设有摄像头9,摄像头9对经过电磁铁2下方的餐盘5和餐碗4进行监测从而识别餐盘5和餐碗4内是否放置有勺子3或筷子6。磁吸侧移机构8先驱动磁吸升降机构7和电磁铁2到达餐盘5上方,摄像头9监测到餐盘5上放置有勺子3和筷子6,那么磁吸侧移机构8就停止驱动,磁吸升
降机构7先驱动电磁铁2往下运动直至餐盘5上方一厘米处,该高度为预设高度,电磁铁2通电具有磁力就作为磁吸机构,把餐盘5上的勺子3和筷子6吸附住,磁吸升降机构7再驱动电磁铁2往上运动,电磁铁2就带动勺子3和筷子6一起往上运动从而离开餐盘5,这样就可以从放置有勺子3和筷子6的餐盘5上分离出勺子3和筷子6了。在此之后,磁吸侧移机构8继续驱动磁吸升降机构7和电磁铁2往左运动到餐碗4上方,摄像头9监测到餐碗4上放置有勺子3,磁吸侧移机构8就停止驱动,磁吸升降机构7重复上述分离操作,先驱动电磁铁2往下运动到达预设高度,电磁铁2就吸附起餐碗4上的勺子3,磁吸升降机构7再驱动电磁铁2往上运动,电磁铁2就带动勺子3往上运动离开餐碗4,这样就可以从放置有勺子3的餐碗4上分离出勺子3了。见图3,在滚筒传送带1把餐盘5和餐碗4都传送到多根碗盘暂存辊轴26上之后,磁吸升降机构7驱动电磁铁2下降到预设高度,电磁铁2断电失去磁力从而解除对勺子3和筷子6的吸附,被电磁铁2吸附的勺子3和筷子6就往下掉落到滚筒传送带1上。滚筒传送带1由四根滚筒构成,每相邻两根滚筒之间留有供勺子3和筷子6掉落的掉落口11,也就是滚筒传送带1留有三个掉落口11,滚筒传送带1下方设有作为勺筷回收容器的勺筷回收箱10,掉落到滚筒传送带1上的勺子3和筷子6分别从这三个掉落口11往下掉落到勺筷回收箱10中。
21.见图4,滚筒传送带1上方的电磁铁2、磁吸升降机构7、摄像头9和磁吸侧移机构8共同组成磁吸组件。由图4可知,餐具回收分离机构22有左、右两个磁吸组件31、32,其中由上方的磁吸侧移机构8、左方的电磁铁2、左方的磁吸升降机构7和左方的摄像头9构成左磁吸组件31,由下方的磁吸侧移机构8、右方的电磁铁2、右方的磁吸升降机构7和右方的摄像头9构成右磁吸组件32。左磁吸组件31在滚筒传送带1左侧进行上述监测和分离操作,右磁吸组件32在滚筒传送带1右侧进行上述监测和分离操作。因为本实施例里餐盘5和餐碗4放置在输送带20左侧,所以输送带20把餐盘5和餐碗4输送到其前端之后,由左侧的滚筒传送带1承接并传送餐盘5和餐碗4,左侧的滚筒传送带1把餐盘5和餐碗4往前传送到碗盘暂存辊轴26上的过程中,会经过左磁吸组件31下方,为了方便读者观看和理解,在图2和图3中没有画出右磁吸组件32。在左磁吸组件31上的磁吸升降机构7驱动电磁铁2升降次数达到阈值之后,该电磁铁2所吸附的细小餐具也就达到一定数量了,此状态下这个电磁铁2不方便吸附更多的细小餐具。在本实施例里该阈值为十次,也就是在左磁吸组件31上的电磁铁2升降次数达到十次之后,左磁吸组件31上的磁吸升降机构7、电磁铁2和摄像头9就一起往左运动到滚筒传送带1左端,此状态下右磁吸组件32上的磁吸升降机构7、电磁铁2和摄像头9就在滚筒传送带1的左侧和右侧往复运动,也就是在左磁吸组件31的电磁铁2不方便吸附更多的细小餐具的状态下,就由右磁吸组件32对滚筒传送带1进行监测和分离操作,反之亦然。在滚筒传送带1和碗盘存储辊轴26(见图3)上盖有罩子23,罩子23可以对碗盘暂存辊轴26上的餐碗4和碗盘5进行限位,罩子23后侧上方开有分离口24供上述两个电磁铁2伸入进行磁吸分离。
22.见图2,在本实施例里,磁吸升降机构7驱动电磁铁2往下运动所到达的预设高度为餐盘5上方一厘米处,在其他实施例里,上述预设高度可以根据实际需要进行调整,来使得电磁铁2到达预设高度之后能够把餐盘5和餐碗4上的筷子6和勺子3吸附起来。
23.见图3,本实施例里,采用将电磁铁2断电的方式来使磁吸机构解除对细小餐具的吸附。在其他实施例里,也可以改为采用其他方式来使磁吸机构解除对细小餐具的吸附,比如在滚筒传送带1左端上方设置一块挡板,挡板上开有通槽,如果磁吸机构需要解除对细小餐具的吸附,那么磁吸机构就先下降到预设高度后再往左移动穿过上述通槽,而磁吸机构
所吸附的细小餐具就被挡板挡住,磁吸机构穿过通槽后继续往左移动,那么磁吸机构与这些细小餐具的距离就越来越大,磁吸机构对细小餐具的磁吸力也就越来越小,磁吸机构往左移动至其对细小餐具的磁吸力不足以使这些细小餐具紧贴在挡板上,那么这些细小餐具就自然往下掉落,以此来使得磁吸机构解除对细小餐具的吸附。
24.见图1,在本实施例里,放置在食物容器内的细小餐具是勺子3和筷子6,细小餐具回收容器是勺筷回收容器,在其他实施例里,细小餐具可以是勺子3或筷子6任一个,也可以是刀子或叉子任一个,那么细小餐具回收容器就是勺子回收容器、筷子回收容器、刀子回收容器或叉子回收容器。
25.如上所述仅为本发明创造的实施方式,不以此限定专利保护范围。本领域技术人员在本发明创造的基础上作出非实质性的变化或替换,仍落入专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1