固体重力流运载设备及储能系统的制作方法
1.本申请涉及重力储能领域,尤其涉及一种固体重力流运载设备及储能系统。
背景技术:
2.能源是人类生存与社会发展的物质基础,保障充足的能源供给是人民幸福生活的必要条件;太阳能永恒,取之不尽,用之不竭,若使太阳能成为人类的终极能源,人类将再也无须为化石能源的耗竭而担忧,再也无须因使用化石能源恶化环境而焦虑。
3.但太阳能存在实用性障碍。由于地球的自转作用,有向阳时的白昼和背阴时的黑夜;由于地球公转作用,有夏与冬阳光强弱的季差;并且地球表面土地与海洋的性质区别,和地形变化等各种因素造成水汽蒸发、空气对流的阴天、下雨等各种气象。昼、夜的间歇,冬、夏的季差,气象变化的阴天、下雨,这些都阻碍了太阳能的实用性。
4.通过储能可以实现太阳能的时空搬移,使之在任何时候都能稳定地使用来之太阳的能源。但是,以太阳能为供人类使用的终极能源,其数值巨大,能够适用平衡昼夜差、季差、气象差的储能,需要超大规模储能系统支持;需要巨大的储能资源保证。能源是人类生存和社会发展的基本物质,其经济性极具敏感度,低成本储能是必要条件;由于平衡昼夜差、季差、气象差所需的储能量值巨大,其与之相关的产业及其日常运行必须对环境友好。
5.目前已有的多种物理、化学的储能的技术,但以抽水蓄能为主。截止2017年,全球96%以上的储能装机为抽水蓄能,中国99%以上储能装机是抽水蓄能。现有储能项目的主要目的是为优化电网运行的削峰填谷,规模有限;就此,建设抽水储能电站可供地理资源已十分紧缺,电站选址越来越困难。虽然近几年化学储能项目增多,但是若要采用化学电池满足能源转型需要的超大的规模的储能,在资源保障、经济性、和环境承受上都不具有现实性。所以目前已有的物理、化学的储能技术均无法满足以能源转型为目的的超大规模要求。
技术实现要素:
6.本申请实施例提供一种固体重力流运载设备,其中,所述固体重力流运载设备包括重力储能元件移动轨道、动子主轨道、动子辅轨道、直线电机定子组和直线电机动子组,所述重力储能元件移动轨道用以对重力储能元件升降移动导向,所述重力储能元件移动轨道具有低海拔(堆场)段和与所述低海拔段相对的高海拔(堆场)段,以及位于所述低海拔段和高海拔段之间的倾斜段,所述动子主轨道设置于所述重力储能元件移动轨道两侧,与所述重力储能元件移动轨道平行,所述动子辅轨道设置于所述动子主轨道背离所述重力储能元件移动轨道一侧,所述动子辅轨道与所述动子主轨道平行,所述直线电机定子组包括设置于所述动子主轨道的主动力定子和设置于所述动子辅轨道的回程定子,所述直线电机动子组包括多个运载动子模块,其中部分运载动子模块连续排布于所述动子主轨道,另外部分运载动子模块与所述动子辅轨道配合移动,当所述运载动子模块与所述主动力定子电磁耦合时,随所述重力储能元件同步升起或下降,以将电能转换为重力势能进行存储或将重力势能转换为电能进行释放,当所述运载动子模块与所述回程定子配合时,所述回程定子
驱动所述运载动子模块返回,以待再次进入动子主轨道。
7.本申请实施例提供一种储能系统,其中,所述储能系统包括上述的固体重力流运载设备,所述储能系统还包括多个重力储能元件、低海拔堆场和高海拔堆场,所述重力储能元件可沿所述重力储能元件移动轨道移动,且所述重力储能元件与所述运载动子模块分离或连接,所述低海拔堆场与所述低海拔段对接,所述高海拔堆场与所述高海拔段对接,当所述储能系统储能时,所述低海拔堆场向所述低海拔段输送所述重力储能元件,所述高海拔堆场从所述高海拔段接收并存储所述重力储能元件,当所述固定重力储能系统释能时,所述高海拔堆场向所述高海拔段输送所述重力储能元件,所述低海拔堆场从所述低海拔段接收并存储所述重力储能元件。
8.本申请实施例提供的固体重力流运载设备及储能系统,通过所述动子主轨道设置于所述重力储能元件移动轨道两侧,与所述重力储能元件移动轨道平行,所述动子辅轨道设置于所述动子主轨道背离所述重力储能元件移动轨道一侧,所述主动力定子设置于所述动子主轨道,多个所述运载动子模块连续排布于所述动子主轨道,与所述主动力定子耦合,随所述重力储能元件同步升起或下降,以将电能转换为动力,推动储能元件上升,使之改变位能,进行存储;或将储能元件下降的重力势能转换为电能,反馈回电网;当所述运载动子模块与所述回程定子配合时,所述回程定子驱动所述运载动子模块返回,以待再次进入动子主轨道。从而使得运载动子模块循环连续运行于所述动子主轨道和所述动子辅轨道,进而便于所述重力储能元件形成固体重力流。
9.本发明的目的是以实现能源完全转型为目标,创新一种有足够资源保障、经济性优越、对环境友好的超大规模储能技术,以实现使太阳能成为人类现实的终极能源。
10.本发明利用高海拔的高原、高山与周边的低海拔盆地、低地之间大海拔高差的地形条件,以改变固体重力位能的形式实现储能;此类地形的地理资源极为丰富,由此解决了基于能源完全转型条件下的超大规模储能的资源保障问题。
11.本发明创造了固体重力流的技术概念(技术方法),使固体重物流态化,固体重力储能元件在升降通道上全程前后顶推串联,在动力或重力的作用下类似水流,在储能或释能的不同功能时区,固体重力流可在数千米的海拔高差之间单向运动,大大地地提高了系统运行效率,且易于实现单机大容量,超大容量的储能系统。
12.本发明固体重力储能元件升降通道的分设动力走廊段和非动力轨道段,动力走廊段产生固体重力储能元件升降通道上固体重力流上升所需的全部动力,或承载固体重力储能元件升降通道固体重力流下降的全部重力。动力走廊段以高推力密度大推力直线电机为动力,最大限度地缩短的动力走廊主动力段的长度(缩短大推力直线电机的长度),同时强化动力走廊段的路基处理,使之能够承载升降通道全程固体重力储能元件重力所施加的推力,由于动力走廊段承载了升降通道全程固体重力储能元件重力所施加的全部推力,使得非动力的轨道段的固体重力储能元件的重力只对路基施加部分压力,而不向低海拔方向施加推力;从而简化对非动力的轨道段的路基处理,降低路基的造价,最大化地降低系统投资。
13.本发明动力走廊段有主动力轨道和辅轨道及动子转移机构,构成动子在主动力轨道和辅轨道的循环,使得以最少的动子使用量满足系统运行,以降低成本。
14.本发明动力走廊段主动力轨道的直线电机的长定子耦合面的面积与多动子耦合
面的面积和接近相等,动子循环移动过程中动子移入面积与动子移出面积相等,使得系统运行过程中定子面积与多动子的面积和的耦合面积比值近似等于常数,使得直线电机定子不出现无耦合面的空载段,因而直线电机可获得高功率因数和高效率。
附图说明
15.为了更清楚地说明申请的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是申请的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
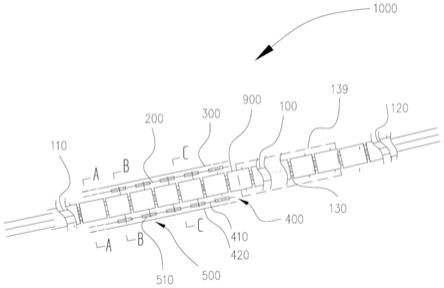
16.图1是本申请实施例提供的固体重力流运载设备的示意图;
17.图2是图1的固体重力流运载设备的c
‑
c的截面示意图;
18.图3是图1的固体重力流运载设备的简化示意图;
19.图4是图1的固体重力流运载设备的b
‑
b的截面示意图;
20.图5是图1的固体重力流运载设备的a
‑
a的截面示意图;
21.图6是图1的固体重力流运载设备的局部示意图;
22.图7是本申请实施例提供的储能系统的简化示意图;
23.图8是图7的储能系统的重力储能元件移动轨道的示意图;
24.图9是本申请实施例提供的储能系统高、低海拔堆场重力储能元件移动轨道截面示意图;
25.图10是图7的储能系统的局部示意图;
26.图11是高海拔堆场正向示意图
27.图12是低海拔堆场侧向示意图
28.图13是图7的储能系统的重力储能元件的侧向示意图
29.图14是图7的储能系统的重力储能元件的后向示意图
30.图15是图7的储能系统的简化示意图。
具体实施方式
31.下面将结合申请实施方式中的附图,对申请实施方式中的技术方案进行清楚、完整地描述。
32.请参阅图1和图2,本申请提供一种固体重力流运载设备1000,包括重力储能元件移动轨道100、动子主轨道200、动子辅轨道300、直线电机定子组400和直线电机动子组500。所述重力储能元件移动轨道100用以对重力储能元件900升降移动导向。所述重力储能元件移动轨道100具有低海拔段110和与所述低海拔段110相对的高海拔段120,以及位于所述低海拔段110和高海拔段120之间的倾斜段130。所述动子主轨道200设置于所述重力储能元件移动轨道100一侧,与所述重力储能元件移动轨道100平行。所述动子辅轨道300设置于所述动子主轨道200背离所述重力储能元件移动轨道100一侧,所述动子辅轨道300与所述动子主轨道200平行。所述直线电机定子组400包括设置于所述动子主轨道200的主动力定子410和设置于所述动子辅轨道300的回程定子420。所述直线电机动子组500包括多个运载动子模块510,其中部分运载动子模块510连续排布于所述动子主轨道200,另外部分运载动子模块510与所述动子辅轨道300配合移动。
33.当所述运载动子模块510与所述主动力定子410电磁耦合时,随所述重力储能元件900同步升起或下降,以将电能转换为重力势能进行存储或将重力势能转换为电能反馈回电网2300;当所述运载动子模块510与所述回程定子420配合时,所述回程定子420与辅助动子515配合,驱动所述运载动子模块510返回,以待再次进入动子主轨道200。
34.通过所述动子主轨道200设置于所述重力储能元件移动轨道100一侧,与所述重力储能元件移动轨道100平行,所述动子辅轨道300设置于所述动子主轨道200背离所述重力储能元件移动轨道100一侧,所述主动力定子410设置于所述动子主轨道200,多个所述运载动子模块510连续排布于所述动子主轨道200,与所述主动力定子410配合,以所述重力储能元件900同步升起或下降,将电能转换为重力势能进行存储或将重力势能转换为电能进行释放,所述回程定子420设置于所述动子辅轨道300,以配合所述运载动子模块510返回,从而使得运载动子模块510循环连续运行于所述动子主轨道200和所述动子辅轨道300,进而便于所述重力储能元件900形成固体重力流体进行储能或释能。
35.本实施方式中,所述重力储能元件移动轨道100包括两条平行的铁轨101。两条所述平行的铁轨101分别与所述重力储能元件900的滚轮滚动配合,以对重力储能元件900进行移动导向。所述铁轨101固定于具有较高海拔高度的山体上。所述低海拔段110位于山体的低海拔位置,所述高海拔段120位于山体的高海拔位置。所述倾斜段130位于山体的斜坡。所述高海拔段120与所述低海拔段110的海拔高差在800m~3000m或3000m以上。例如,所述低海拔段110的海拔高度为1200m,所述高海拔段120的海拔高度为4200m。所述倾斜段130的坡度优选范围为20
°
至60
°
,例如所述倾斜段130的坡度为30
°
。例如所述倾斜段130的长度6000m。
36.本实施方式中,所述固体重力流运载设备1000包括两条所述动子主轨道200,两条所述动子主轨道200分别设置于所述重力储能元件移动轨道100两侧,以便于带动所述重力储能元件900平衡地移动。每一条所述动子主轨道200都可对所述运载动子模块510移动导向。所述动子主轨道200设有主轨道定子机体210。主轨道定子机体210用以收容运载动子模块510的一部分,且收容主动力定子410,以使得主动力定子410与运载动子模块510配合,从而便于实现重力势能与电能转换。主轨道定子机体210对运载动子模块510进行滑动导向,以便于运载动子模块510与动子主轨道200滑动配合。
37.所述动子主轨道200与倾斜段130的一部分相对应,即动子主轨道200的长度远短于倾斜段130的长度。动子主轨道200的长度是倾斜段130的长度一部分,例如所述倾斜段(升降通道)130的长度在6000m,动子主轨道200的长度为300~1000m,动子主轨道200的长度是根据大推力直线电机所处的技术水平决定,设计目标是使动子主轨道200尽量短,但是受限于各阶段采用的直线电机技术水平,譬如采用定子、动子全超导直线电机,单位长度(面积)的推力密度大,动子主轨道200长度可以取值较短,取值范围一般是倾斜段130(固体重力储能元件升降通道)的十分之一至二十分之一。
38.倾斜段130在动子主轨道200之外的部分构成非动力轨道段139,非动力轨道段139占据倾斜段130较大的区域。
39.所述动子主轨道200的长度远小于倾斜段130的长度,对应覆盖所述倾斜段130连接低海拔段110处,以便于在山体斜坡上结合运载动子模块510带动储能元件上升,实现电能转换成固体重力储能元件的位能,以及便于储能元件带动动子模块510配合所述动子主
轨道200下滑,从使重力势能转换成电能。
40.可以理解的是,当动子主轨道200上的主动力定子410与运载动子模块510配合,实现直线电机驱动重力储能元件900由低海拔段110上升至高海拔段120,从而主动力定子410与运载动子模块510消耗电能做功,而重力储能元件900上升至高海拔段120,从而储存了重力位能。当重力储能元件900从高海拔处下降至低海拔段110,重力储能元件900在重力做功下带动运载动子模块510下降,且运载动子模块510与动子主轨道200上的主动力定子410配合,进而实现电磁激励,以将重力势能转换成电能。
41.本实施方式中,固体重力流运载设备1000包括两条动子辅轨道300,两条动子辅轨道300分别位于两条动子主轨道200两侧。动子辅轨道300负责将动子主轨道200上的运载动子模块510反向运回,以便于运载动子模块510在动子辅轨道300及动子主轨道200上循环移动,当多个运载动子模块510带动多个重力储能元件900在动子主轨道200上连续移动,从而形成类似连续不停的流水储能释能结构,不同的是将传统的流水替代成了连续的固体重力储能元件900构成的固体重力流,实现了可连续不停断地固体重力流进行储能或者释能。动子辅轨道300包括辅轨道定子机体310,辅轨道定子机体310与主轨道定子机体210的结构大致相同在此不再赘述。不同的是,运载动子模块510在辅轨道定子机体310上移动是与动子辅轨道300上的回程定子420配合,也就是回程定子420与运载动子模块510形成返回运输直线电机,利用返回运输直线电机带动运载动子模块510返回。由于运载动子模块510返回时,运载动子模块510已经与重力储能元件900分离,因此回程定子420与运载动子模块510配合仅消耗运载动子模块510的重力及移动摩擦阻力,即消耗电能较小,对储能或释能影响较小。
42.本实施方式中,主动力定子410为高推力密度大推力直线电机的定子。主动力定子410沿主轨道定子机体210长度方向安装于主轨道定子机体210上,并收容于主轨道定子机体210空腔内。回程定子420沿动子辅轨道300长度方向安装。回程定子420固定于辅轨道定子机体310,回程定子420的长度与辅轨道定子机体310的长度一致。回程定子420固定于辅轨道定子机体310的外侧,以便于回程定子420与运载动子模块510配合。
43.本实施方式中,多个运载动子模块510连续排布于所述动子主轨道200,即在储能或释能过程中,动力主轨道200的多个运载动子模块510的长度和约等于主动力定子410的长度,使得多个动子的长度和与长直线电机定子全长度耦合,使得长直线电机定子的全部长度均处荷载状态,以获得直线电机运行的高功率因数和高效率。动子主轨道200上始终存在多个连续移动的运载动子模块510,以使得全程的重力储能元件900连续沿重力储能元件移动轨道100移动,从而形成固体重力流。
44.可以理解的是,本申请了所提供的固体重力流运载设备1000可应用于大海拔位差固体重力储能系统,具有如下有益效果:
45.1.充分利用自然条件,使大海拔高差的地形成为重力储能资源
46.1.1由于地球引力的作用,重力储能元件900自然就具备位能。重力储能元件900的高低海拔相对值越大,其位能绝对值越大;重力储能元件900在某高度停留,位能就在某高度存在,即实现了储能;
47.由于固体是自然界最基本的物资,沙、土、石头等都是地球的基本材料,非常丰富,取材便利,而且易于工程成形处理,形状不会随时间改变,质量不会随时间消失;以固体材
料为重力储能元件900造价便宜。
48.1.2由于重力储能元件900的位能能量密度取决重力储能元件900所处位置高差的绝对值,即海拔高差决定了重力储能元件900的位能能量密度。也就是说,选择大海拔高差是提高重力储能元件900位能储能密度的优选条件。
49.由于高原、大山是地球的基本形态,在世界各大洲都不同程度普遍存在;亚洲高原、大山的地理资源特别丰富,(在我国境内的青藏高原、帕米尔高原的边缘长度达6000~7000公里,与高原边缘的平原、盆地之间海拔高差可达2000~3000m,地形条件优越,非常有利于大海拔高差固体重力储能电站建站选址,可供选择的地理资源量十分丰富(按最大需要,实际工程需求量小于500公里),足以支持能源转型所需超大规模储能。)(青藏高原、帕米尔高原与周边的平原、盆地之间平均高差可达3000m以上,从而固体重力储能的资源极为丰富)。
50.2.创新工程技术手段
51.本发明颠覆性地创造了一种形成固体重力流的方法,使固体重物流态化,使得固体重力流类似液体流(水流),在动力或重力的作用下,受控在高海拔与低海拔无间隔地持续流动(运动),按储能或释能的不同时区,控制流动方向将电力转换为动力,使固体重物升上高处,改变重力的位能,实现储能;或将固体重物降至低处,将固体重力转换为电能,向电网释能。其原理与基于液体重力流的抽水蓄能电站相似。但是基于固体重力流的大海拔高差固体重力储能利用高原、大山与周边边缘的地理资源丰富,有充分的资源保障;地形的海拔高差大,并且固体物质质量密度大,性质稳定,可供数量几乎不受限制,由此,固体重力储能可适用于超大规模储能,可承担起能源完全转型所需要的储能规模要求,可为能源转型革命提供关键的储能技术支撑。
52.1、设计前后有顶推凸台、左右二侧有伸缩力臂、底部有滚动轮的固体重力储能元件;
53.2、选择大海拔高差的地形,在高低海拔之间建造固体重力储能元件的升降通道;
54.3、固体重力储能元件在升降通道上前后相接,全程串联,当在动力,或重力作用下顶推联动,使固体重力储能元件流态化,形成固体重力流;
55.4、在固体重力储能元件升降通道的低海拔段设置以直线电机为动力的动力转换机构(称之为动力走廊),动力转换机构吸收电网的电力对固体重力储能元件施加上升的动力,或吸收固体重力储能元件的重力转换为电力,反馈回电网;
56.5、在高、低海拔堆场设置行车阵列,用于固体重力储能元件从各个堆垒位向轨道汇集或从轨道向各个堆垒位分散就位;
57.6、在系统控制单元的控制下,高、低海拔堆场的固体重力储能元件汇集与分散的速度与固体重力流的流速协调同步,使固体重力流在储能、或释能的功能时区内保持单向持续运动,使系统获得最高的运行效率。
58.利用高原、大山与周边的平原、盆地之间的海拔高差,以实现重力储能元件900在高海拔与低海拔之间运动与停留,使之位能的改变和存储,以达到储能目的。因此,适用于大海拔高差之间在单位时间内使大量重力储能元件900实现升降转移的工程技术是本本申请的创新关键。
59.本申请的固体重力流运载设备1000必须满足大容量、超大容量单机容量、高能量
转换效率、高设备利用效率,低设备投入的工程要求,固体重力流运载设备1000使固体重物以固体重力流的形式运行在系统的高、低海拔之间,实现固体重力位能的改变。具体具备如下有益效果:
60.2.1.本申请的固体重力流运载设备1000适用于大容量、超大容量单机容量要求,所应用的系统成本是由单位容量分摊,单机组容量、超大容量是降低投资的有效手段。
61.2.2.高能量转换效率是储能技术的基本要求,储能能量损失也是构成储能成本的一部分,因此通过本申请的固体重力流运载设备1000的结构创新,提高设备的能量转换效率。
62.2.3.高设备利用效率,在储能或释能功能时段保持连续的固体重力流,如同水流一样是连续不间断的单一流向,使系统在单位时间内获得最大效能。由此储能系统获得储能电量的最大值,使得单位时间的经济成本分摊到度电的储能成本得以大幅度下降,据推算,大海拔固体重力储能系统的度电储能成本为0.15~0.2元/kws,此储能成本低于抽水蓄能,更远低于化学电池蓄能。
63.2.4.降低工程投资
64.本工程的主要投资固体重力储能元件升降通道,升降通道是以直线电机为动力装置使固体重力储能元件以固体重力流形式作升降运动的固体重力流通道。动力装置的动力是安装在路基上的直线电机定子与推动固体重力储能元件升降的动子电磁力相互作用产生的。如果采用常规技术,是在升降通道全程安装直线电机定子,在重力储能元件上安装直线电机动子;如此,升降通道的全程都要承受固体重力储能元件重力所作用的向低海拔的推力,由此导致长距离、大坡度路基的处理难度和投资增加,并且全程安装直线电机及固体重力储能元件上安装动子,如此不仅成本高,而且长距离定子与动子之间的控制小气隙而获得大推力高效率,工程上很难实现。
65.本发明将固体重力储能元件升降通道分设为产生动力的动力走廊段和非动力轨道段;动力走廊段产生固体重力储能元件升降通道上固体重力流上升所需的全部动力,或承载固体重力储能元件升降通道固体重力流下降的全部重力。动力走廊段以大推力直线电机为动力,大推力直线电机根据技术发展水平,尽量选用永磁、动子超导、或定、动子全超导等高推力密度的直线电机,最大限度地缩短的动力走廊主动力段的长度(缩短大推力直线电机的长度),强化动力走廊的路基处理,使之能够承载升降通道全程固体重力储能元件重力所施加的推力,由于动力走廊段承载了升降通道全程固体重力储能元件重力所施加的推力,使得非动力轨道段的固体重力储能元件的重力只对路基施加部分压力,而不向低海拔方向施加推力;从而大大简化对非动力轨道段的路基处理,降低其造价,最大化地降低系统投资。可预见的是:动力走廊的主动力段的长度只是固体重力储能元件升降通道长度的十分之一至二十分之一,投资密度虽然也要向这十分之一至二十分之一集中,但集中度不是成比例的,比全程动力结构可节约大量的投资。
66.进一步地,请参阅图3、图4和图5,所述固体重力流运载设备1000还包括两个动子转移机构600,其中一个所述动子转移机构600对应所述低海拔段110连接所述倾斜段130之间的低海拔弧形段设置,用以将低海拔的运载动子模块510在所述动子主轨道200和所述动子辅轨道300之间转移,另一个所述动子转移机构600设置在动力主轨道200处于高海拔的端部,用以将高海拔的运载动子模块510在所述动子主轨道200和所述动子辅轨道300之间
转移。
67.本实施方式中,所述动子转移机构600与所述动子主轨道200的端部,以及与所述动子辅轨道300端部对接。所述动子转移机构600负责转移与重力储能元件900脱离的运载动子模块510。通过动子转移机构600连续不断地对运载动子模块510进行转移,可以使得重力储能元件900连续不断地从低海拔向高海拔移动,或者是连续不断地从高海拔向低海拔移动,从而实现以固体重力流形式进行储存重力势能或是进行释放重力势能。
68.具体的,所述动子主轨道200具有与所述倾斜段130对应的主动力段230、靠近主动力段230低海拔端的第一动子缓存段220、靠近主动力段230高海拔端的第二动子缓存段240。第一动子缓存段220与低海拔弧形段131相隔设置,第一动子缓存段220与所述低海拔弧形段131之间存在低海拔处的动子转移机构600和非动力轨道段139。第二动子缓存段240与高海拔弧形段132相隔设置,第二动子缓存段240与所述高海拔弧形段132之间存在高海拔处的动子转移机构600和非动力轨道段139。所述重力储能元件900储能过程中,低海拔的所述动子转移机构600将所述动子辅轨道300的运载动子模块510转移至所述第一动子缓存段220,高海拔的所述动子转移机构600将所述第二动子缓存段240的运载动子模块510转移至所述动子辅轨道300。在所述重力储能元件900释能过程中,低海拔的所述动子转移机构600将所述第一动子缓存段220的运载动子模块510转移至所述动子辅轨道300,高海拔的所述动子转移机构600将所述动子辅轨道300的运载动子模块510转移至所述第二动子缓存段240。
69.所述第一动子缓存段220和所述第二动子缓存段240均沿倾斜段130延伸。所述第一动子缓存段220和所述第二动子缓存段240均不参与重力势能转换阶段。第一动子缓存段220和第二动子缓存段240分别与两个动子转移机构600对接(第一动子缓存段220和第二动子缓存段240分别与两个动子转移机构600不对接)。第一动子缓存段220和第二动子缓存段240均用于对运载动子模块510进行缓冲暂存。当运载动子模块510在主动力段230结束运行,从主动力段230被推送至第一动子缓存段220或第二动子缓存段240,运载动子模块510被暂存且等待动子转移机构600的转换轨道就位,在动子转移机构600的转换轨道就位后,运载动子模块510移入转换轨道,然后运载动子模块510从动子主轨道200移至动子辅轨道300。
70.可以理解的是,请参阅图2、图3和图4,所述主动力定子410设置于所述主动力段230。所述主动力段230作为动子主轨道200的主动力部分,以负责与运载动子模块510进行电磁耦合,从而有效实现重力势能转换。第一动子缓存段220和第二动子缓存段240作为动子主轨道200的非动力部分,并不负责储能或释能做功,使得动子主轨道200上的主动力段230缩短最小化,以减小设备成本,提高能源转换效率。主动力段230的动力单元为主动力定子410,主动力定子410沿主动力段230的主轨道定子机体210长度方向安装。当主动力定子410与运载动子模块510上的动子进行电磁耦合时,实现电能转换成重力储能元件上升的动力,或者是重力储能元件的重力势能转换成电能。
71.进一步地,请继续参阅图3、图4和图5,所述直线电机定子组400还包括设置于所述第一动子缓存段220的第一运载定子430和设置于所述第二动子缓存段240的第二运载定子440,所述第一运载定子430用以驱动所述运载动子模块510在所述第一缓存段移动,所述第二运载定子440用以驱动所述运载动子模块510在所述第二缓存段移动。
72.本实施方式中,所述第一运载定子430固定于所述主轨道定子机体210的外侧壁,便于带动运载动子模块510移动。所述第二运载定子440固定于所述主轨道定子机体210的外侧,便于带动运载动子模块510移动。所述第一运载定子430沿所述第一动子缓存段220的长度方向安装,所述第二运载定子440沿所述第二动子缓存段240的长度方向安装。所示第一运载定子430和所述第二运载定子440相同,且驱动力小于主动力定子410,以减小非动力部分的电能能耗,以及减小设备成本。当运载动子模块510进入到第一动子缓存段220,主要靠运载动子模块510上的动子与第一运载定子430电磁耦合,实现消耗电能驱动运载动子模块510移动。当运载动子模块510进入到第二动子缓存段240,主要靠运载动子模块510上的动子与第二运载定子440电磁耦合,实现消耗电能驱动运载动子模块510移动。
73.可以理解的是,当运载动子模块510进入到第一动子缓存段220,运载动子模块510已经完成了重力储能元件900的海拔位差转移,即完成了重力势能转换成电能,此时运载动子模块510可与重力储能元件900分离,分离后,运载动子模块510然后通过转移轨道600转移至动子铺轨道300,作下一次循环。已经与重力储能元件900分离的运载动子模块510由于无需对重力储能元件900转移做功,故在第一动子缓存段220的移动过程中耗能较小,从而可以使用小功率的第一运载定子430与运载动子模块510配合。
74.进一步地,所述动子转移机构600包括两个动子转移轨道610、两个动子横向转移组件620和两个动子纵向转移组件630,两个所述动子纵向转移组件630分别与所述动子主轨道200和所述动子辅轨道300对接,两个所述动子横向转移组件620设置于两个所述动子纵向转移组件630之间,并且一个靠近所述动子主轨道200及动子辅轨道300,另一个远离所述动子主轨道200及动子辅轨道300,两个所述动子转移轨道610在两个所述动子纵向转移组件630及两个动子横向转移组件620所围合呈的矩形框上循环移动,并轮流转移所述运载动子模块510。
75.本实施方式中,所述动子转移轨道610与所述动子主轨道200平行,以及与所述动子辅轨道300平行。所述动子转移轨道610上可承载所述运载动子模块510。所述动子横向转移组件620将所述动子转移轨道610在与动子主轨道200重合的直线上至与动子辅轨道300重合的直线上转移。也就说,所述动子横向转移组件620转移所述动子转移轨道610的方向为动子主轨道200与动子辅轨道300相对的方向。所述动子纵向转移组件630将所述动子转移轨道610在与动子主轨道200重合的直线方向上或与动子辅轨道300重合的直线方向上转移。也就是说,所述动子纵向转移组件630对所述动子转移轨道610的转移方向平行所述动子主轨道200长度方向或是平行所述动子辅轨道300的长度方向。
76.具体的,针对处于低海拔的动子转移机构600进行介绍,所述动子辅轨道300运回的运载动子模块510需要再次进入动子主轨道200,待其中一个动子转移轨道610与动子辅轨道300对接时,另一个动子转移轨道610与动子主轨道200重合且远离动子主轨道200,以等待就位,以与动子辅轨道300对接。运载动子模块510从动子辅轨道300进入动子转移轨道610后,靠近所述动子主轨道200的动子横向转移组件620将动子转移轨道610横向移动至与动子主轨道200对接,并且另一个动子转移轨道610已经被另一个动子横向转移组件620转移至与动子辅轨道300重合待与动子辅轨道300对接的位置,上一个动子转移轨道610上的运载动子模块510完全转移至动子主轨道200后,另一个空置的动子转移轨道610已经被另一个动子纵向转移结构转移至与动子辅轨道300对接的位置,以待再次将动子辅轨道300上
的运载动子模块510转移,从而实现两个动子转移轨道610轮流转移运载动子模块510,以缩短运载动子模块510的转移时间,满足重力储能元件900连续不断以流水形式转移的要求。
77.具体的,所述动子转移轨道610包括支架底板611和固定于所述支架底板611上的两个支架侧板612,所述支架底板611与所述横动子横向转移组件620配合,所述支架侧板612与所述动子纵向转移组件630配合,两个所述支架侧板612之间具有支架空腔613,所述支架空腔613收容所述运载动子模块510的一部分,所述支架侧板612远离所述支架底板611的边缘设有支架滑轨614,所述支架滑轨614用以对所述运载动子模块510滑动导向,所述支架侧板612的一侧设有辅助转移定子615,所述辅助转移定子615与所述运载动子模块510配合,以驱动所述运载动子模块510在所述动子转移轨道610上移动。当所述运载动子模块510需要从所述动子转移轨道610移进或移出时,所述辅助转移定子615与所述运载动子模块510电磁耦合,从而驱动所述运载动子模块510移动。
78.所述动子横向转移组件620包括两个间隔设置且平行的横向定子621和与所述横向定子621配合的横向转移动子622,所述横向定子621的长度方向垂直所述动子主轨道200,所述横向转移动子622固定于所述支架底板611,以带动所述动子转移轨道610横向移动。利用两个所述横向定子621对所述动子转移轨道610进行承载驱动,便于所述动子转移轨道610平衡稳定地移动。
79.所述动子纵向转移组件630包括纵向定子631和与所述纵向定子631配合的纵向转移动子632,其中一个所述纵向定子631与所述动子主轨道200邻近,另一个所述纵向定子631与所述动子辅轨道300邻近,所述纵向转移动子632固定于所述支架侧板612背离所述支架空腔613一侧。当所述动子转移轨道610被所述动子横向转移组件620驱动至与所述动子主轨道200或动子辅轨道300重合的一侧,相邻近一侧的纵向定子631可以与同侧的纵向转移动子632电磁耦合,进而驱动动子转移轨道610沿动子主轨道200长度方向移动。
80.进一步地,请参阅图4、图5和图6,所述运载动子模块510包括滑动基座511、固定于所述滑动基座511底部的主动力动子512和固定于所述滑动基座511的顶部的连接推台513,所述滑动基座511的底部还设有两个相对的动子导滑条514,两个所述动子导滑条514与所述动子主轨道200和动子辅轨道300滑动配合,所述主动力动子512位于两个所述动子导滑条514之间,与所述主动力定子410配合,所述连接推台513用以与所述重力储能元件900稳固连接,以使所述运载动子模块510带动所述重力储能元件900升起,或随所述重力储能元件900一起下降。
81.本实施方式中,所述滑动基座511作为所述运载动子模块510的主体,以使得主动力动子512和连接推台513稳固。所述主动力动子512由超导电励磁体、或永磁体、或者常导电励磁体的任意一种或多种混合结构。主动力动子512与主动力定子410经电磁耦合产生直线驱动力。当所述运载动子模块510进入所述动子主轨道200且与主动力段230配合,主动力动子512与主动力定子410耦合连接,且连接推台513与重力储能元件900的一部分稳固连接,以使得滑动基座511与重力储能元件900一起联动,以实现利用电能驱动所述滑动基座511相对所述主轨道定子机体210移动,并将重力储能元件900升起,以实现电能转换成重力势能存储,或是利用重力势能带动所述滑动基座511相对所述主轨道定子机体210移动,结合主动力动子512与主动力定子410电磁激励,实现将重力势能释放转换成电能,以供电网用电。
82.更为具体的,所述动子主轨道200包括第一底板201和固定于所述第一底板201上的两个第一侧板202,所述第一侧板202远离所述第一底板201的边缘设有第一动子滑轨203,所述第一底板201用以固定于山体,两个所述第一侧板202之间具有第一空腔204,所述第一动子滑轨203与所述动子导滑条514滑动配合,所述主动力定子410收容于所述第一空腔204,并固定于两个所述第一侧板202的内侧。
83.当运载动子模块510进入主动力段230,主动力动子512收容于第一空腔204,与主动力定子410耦合。两个动子导滑条514分别与两个第一动子滑轨203滑动配合。
84.所述第一运载定子430固定于第一动子缓存段220的第一侧板202背离第一空腔204一侧。所述运载动子模块510还包括固定于所述动子导滑条514的辅助动子515。当运载动子模块510进入第一动子缓存段220,辅助动子515刚好与第一运载定子430耦合连接,从而可以结合辅助动子515与第一运载定子430驱动运载动子模块510在第一动子缓存段220移动。
85.第二运载定子440固定于第二动子缓存段240的第一侧板202背离第一空腔204一侧。当运载动子模块510进入第二动子缓存段240,辅助动子515刚好与第一运载定子430耦合连接,从而可以结合辅助动子515与第二运载定子440驱动运载动子模块510在第一动子缓存段230移动。
86.本实施方式中,所述动子辅轨道300包括第二底板301和固定于所述第二底板301上的两个第二侧板302,所述第二侧板302远离所述第二底板301的边缘设有第二动子滑轨303,所述第二底板301用以固定于山体,两个所述第二侧板302之间具有第二空腔304,当所述第二动子滑轨303与所述动子导滑条514滑动配合时,所述主动力动子512收容于所述第二空腔304内。
87.当运载动子模块510与重力储能元件900分离后,可在所述动子转移轨道610的转移下进入动子辅轨道300。运载动子模块510进入动子辅轨道300后,主动力动子512收容于第二空腔304,并不存在电磁耦合,而是利用辅助动子515与回程定子420耦合,以驱动运载动子模块510在动子辅轨道300上移动,且两个动子导滑条514与两个第二动子滑轨303滑动配合。
88.当运载动子模块510与动子转移轨道610滑动配合的过程中,辅助转移定子615与辅助动子515电磁耦合,从带动运载动子模块510在动子转移轨道610上移动,且主动力动子收容于支架空腔613,并不与任何器件产生电磁耦合,而两个动子导滑条514分别与两个支架滑轨614滑动配合,以保证运载动子模块510在动子转移轨道610上顺利移动。
89.本实施方式中,所述运载动子模块510还包括固定于所述滑动基座511的杜瓦罐516和制冷机517,所述制冷机517对所述主动力动子512降温,以使得主动力动子512保持超导状态。所述杜瓦罐516收容主动力动子512的绕线组,利用杜瓦罐516和制冷机517对主动力动子512降温,保持低温,使动子绕组保持超导状态。
90.进一步地,请参阅图1、图7和图8,所述倾斜段130与所述低海拔段110设置低海拔弧形段131,所述倾斜段130与所述高海拔段120之间设置高海拔弧形段132。
91.本实施方式中,所述低海拔弧形段131连接所述倾斜段130和低海拔段110,以便于重力储能元件900可以顺畅地由低海拔段110进入倾斜段130。高海拔弧形段132连接倾斜段130和高海拔段120,以便于重力储能元件900可以顺畅地由高海拔段120进入倾斜段130。
92.可以理解的是,动子主轨道200包括由大推力直线电机组成的主动力段230、作为非动力部分的第一动子缓存段220及第二动子缓存段240,主动力段230位于动子主轨道200的中间段,第一动子缓存段220和第二动子缓存段240分设于主动力段230的两端与动子转换机构之间。
93.动子辅轨道300是用于运载动子模块510结束一个动力做功行程后的回程通道,为接续下一个运载动子模块510动力做功过程提供动子循环通道。动子辅轨道300的辅轨道定子机体310与主动力段230的主轨道定子机体210采用统一尺寸的空腔结构的机体。
94.在动子主轨道200及动子辅轨道300的两端设有动子转移机构600,动子转移机构600用于将运载动子模块510从动子主轨道200向动子辅轨道300转移,或者从动子辅轨道300向动子主轨道200转移;实现运载动子模块510运行循环,使运载动子模块510高效循环利用,节约动子用量,以降低系统成本。
95.获得高的能量存储转换效率是储能的关键指标,关系到储能经济性,本申请提供的固体重力流设备采用直线电机作为固体重力储能元件900升降运载通道的动力设备,提高能量转换效率是本申请的一个重要特征。
96.直线电机在轨道交通领域已经得到应用,体现了直线电机综合性能优势。但是直线电机的能量转换效率低于旋转电机,作为储能应用是必须要克服的缺点。
97.旋转电机的定子内径与转子外径之间全面积耦合,定子的行波磁场产生的切向推力全部有效作用于转子;定子与转子之间的气隙取值小,气隙磁阻损耗小,效率高。
98.但是在如磁悬浮列车、电磁弹射器等已有直线电机应用中,直线电机定子与动子耦合,产生电磁推力的长度仅为定子通电长度的局部的一小段,定子通电长度的其余部分均为无载通电状态,导致功率因数低、效率下降。
99.本申请提供的固体重力流运载设备1000的主动力段230的主动力定子410与多个主动力动子512的长度和为全长度全程耦合,并保持主动动子的移出与移入实时平衡,使之耦合度为常数。主动力段230的主动力定子410与主动力动子512之间全长度切面均产生有效推力,由此大大地提高直了直线电机作为储能应用的能量转换效率。
100.主动力段230由机械结构的主轨道定子机体210内安装主动力定子,机体强度高,主动力动子512限于主轨道定子机体210的第一滑轨与运载动子模块510的动子导滑条514约束,主动力定子410与主动力动子512之间的气隙便于较小的设计取值,进一步提高效率。
101.动子主轨道200是系统的动力核心,在系统储能时,将电网的电力转换为推动,沿重力储能元件移动轨道100上升的动力;系统释能时,动子主轨道200将重力储能元件移动轨道100上多个重力储能元件900形成固体重力流的机械推力转换为电力回馈电网。
102.主动力段230是构成系统的最主要部分,提高主动力段的推力密度,缩短主动力段230的长度,可以减少重力储能元件移动轨道100的地下基础工程成本,降低主轨道定子机体210成本,和减少运行维护成本等现实与潜在的优点,本申请的固体重力流运载设备1000为了提高主动力段230单位长度的推力密度,以缩短主动力段230的长度,采用以下方式来实现上述目的:
103.1.在主轨道定子机体210上设置多列长一次侧的主动力定子410,使之在单位长度内倍增加定、动子之间的耦合面积,以增加单位长度的切向推力密度;同时,多列长一次侧的主动力定子410采用镜像安装,主动力动子512在镜像安装的主动力定子410之间穿行,以
平衡法向力。
104.2.主动力定子410和主动力动子512所构成的直线电机单位面积推力密度大,并且根据技术的不同成熟度,可选用的电励磁式直线电机、永磁式直线电机、动子励磁超导直线电机、或者定子、动子全超导直线电机。本实施方式中为双列动子励磁高温超导直线电机。
105.作为一种具体实施方式,本申请的低海拔段110的海拔高1200m,高海拔段120的海拔高4200m,低海拔段110与高海拔段120的海拔高差3000m,倾斜段130的坡度30
°
,倾斜段130的坡长6000m。
106.重力储能元件900的横截面按道路运输进行设置,例如重力储能元件900的宽度为3.2m,重力储能元件900的高度为3.2m,重力储能元件900的截面积10.24m2,计重力储能元件900的横截面10m2。
107.重力储能元件900包括箱体,所述箱体取钢制箱式壳体,箱体内部填充废石、沙土,箱体和内部填充物的平均质量密度2500kg/m3,单位长度重量=25000kg/m。
108.倾斜段130的坡道长总荷重g2.5=25000(kg)
×
6000(m)=150000000kg,
109.倾斜段130的多重力储能元件900形成的固体重力流的总推力f2.5=150000000(kg)
×
9.8
×
sin30=735(mn)
110.主动力定子410与主动力动子512耦合面单位面积切向推力0.25mn,单位长度高度边长1.5m,单侧双列4耦合面的耦合面积6m2,双侧耦合面积共12m2,主动力段230单位长度推力为3mn/m。
111.主动力段230长度l=735(mn)
÷
3mn=245(m)
112.考虑到加速度推力裕量乘以1.2系数主动力段230长度l取值300m,动力段长度为重力储能元件移动轨道100的总长6000m的二十分之一。
113.设多个储能元件形成的固体重力流流速v4=4(m/s)
114.所需的主动力定子410与主动力动子512所构成的直线电机功率p4=735(mn)
×
4(m/s)=2940000(kw)
115.即该机组每小时(理论)储能294万千瓦时,每年1600小时,储能电量470400万千瓦时。
116.请继续参阅图1、图7和图8,本申请还提供一种储能系统2000,所述储能系统2000包括所述固体重力流运载设备1000,所述储能系统2000还包括多个重力储能元件900、低海拔堆场800和高海拔堆场700,所述重力储能元件900可沿所述重力储能元件移动轨道100移动,且所述重力储能元件900与所述运载动子模块510分离或连接。所述低海拔堆场800与所述低海拔段110对接,所述高海拔堆场700与所述高海拔段120对接。当所述储能系统2000储能时,所述低海拔堆场800向所述低海拔段输送所述重力储能元件900,所述高海拔堆场700从所述高海拔段120接收并存储所述重力储能元件900。当所述固定重力储能系统2000释能时,所述高海拔堆场700向所述高海拔段120输送所述重力储能元件900,所述低海拔堆场800从所述低海拔段110接收并存储所述重力储能元件900。
117.本实施方式中,全程升降轨道上的多个重力储能元件900与重力储能元件移动轨道100滚动配合,即多个重力储能元件900可连续地沿重力储能元件移动轨道100被主动力定子410与主动力动子512产生的电磁推力推动升起,多个重力储能元件900也可连续地沿重力储能元件移动轨道100在重力作用推动下降。当重力储能元件900进入倾斜段130的动
子主轨道200后,重力储能元件900与运载动子模块510的连接推台513连接,以使得重力储能元件900被运载动子模块510推动,或是重力储能元件900带动运载动子模块510联动。多个重力储能元件900连续不断地排布在倾斜段130移动,使得全程的多个重力储能元件900形成固体重力流在倾斜段130上流动。当固体重力流沿倾斜段130上升流动时,使得电网多余的电能转换成多个重力储能元件900的重力势能,并将多个重力储能元件900的重力势能进行存储。当固体重力流在倾斜段130下降流动时,使得多个重力储能元件900的重力势能转换成电能回馈至电网。
118.本实施方式中,所述低海拔堆场800用以储存系统释能时下降至低海拔处的重力储能元件900,并且待下次系统储能时,再将低海拔堆场800的重力储能元件900上升至高海拔处。所述高海拔堆场700用以储存系统储能时上升至高海拔处的重力储能元件900,并且待下次系统释能时,再将高海拔堆场700的重力储能元件900下降至低海拔处。
119.进一步地,所述低海拔段110设有低海拔集散段111、低海拔缓存运送段112和低海拔接送段113,所述低海拔集散段111与所述低海拔堆场800对接,用以对所述重力储能元件900集散运输,所述低海拔缓存运送段112将所述重力储能元件900在所述低海拔集散段111和所述低海拔接送段113之间转移运送,所述低海拔接送段113用以在储能时将所述重力储能元件900推送至所述倾斜段130。
120.本实施方式中,所述低海拔集散段111是将运送至低海拔的重力储能元件900进行集散安置于轨道上,以待将重力储能元件900进行堆叠地存放在低海拔堆场800,或是将低海拔堆场800的重力储能元件900集散地安置于轨道上。所述低海拔缓存运送段112以将低海拔集散段111集散安置的重力储能元件900运送至低海拔接送段113,或是将低海拔接送段113的重力储能元件900运送至低海拔集散段111集散安置。所述低海拔接送段113是从低海拔弧形段131的下降的重力储能元件900接收并运送至低海拔缓存运送段112,或是将低海拔缓存运送段112所运送过来的重力储能元件900推送至低海拔弧形段131。低海拔接送段113的推动动力来自动子主轨道200上的运载动子模块510,即重力储能元件900在低海拔接送段113与运载动子模块510连接或分离。运载动子模块510在低海拔接送段113通过辅助动子515与第一运载定子430配合从而获得推动力。可以理解的是,所述低海拔接送段113通过辅助动子515与第一运载定子430配合将多个重力储能元件900串联推入与所述动子主轨道200相对应的轨道。
121.进一步地,请参阅图9,所述直线电机定子组400还包括固定于所述低海拔集散段111和所述低海拔缓存运送段112的低海拔定子450,所述直线电机动子组500还包括与所述低海拔集散段111和所述低海拔缓存运送段112滑动配合的低海拔动子模块550,所述低海拔动子模块550设有可伸缩地第一卡舌551,当所述第一卡舌551与所述重力储能元件900的底部卡合,所述低海拔动子模块550带动所述重力储能元件900移动,当所述第一卡舌551与所述重力储能元件900的底部分离,所述低海拔动子模块550与所述重力储能元件900分离。
122.本实施方式中,在低海拔集散段111和低海拔缓存运送段112的底部设有第一增高轨台114,以便于在重力储能元件900与地面之间腾出更多空间,从而便于在重力储能元件900的底部与地面之间安装低海拔定子450和低海拔动子模块550。所述第一增高轨台114的内侧设有第一台阶115,第一台阶115上设有低海拔动子滑轨116,低海拔动子滑轨116与低海拔动子模块550滑动配合,以便于低海拔动子可驱动重力储能元件900在低海拔处移动。
具体的,低海拔动子模块550设有低海拔动子基座552和可滑动伸缩地连接于低海拔动子基座552的第一卡舌551。低海拔动子基座552的底部设有与低海拔动子滑轨116滑动配合的低海拔滑动枕553。所述低海拔动子模块550还设有固定于低海拔动子基座552底部且位于两个低海拔滑动枕553之间的低海拔动子554。所述低海拔动子554与所述低海拔定子450耦合连接,以实现驱动低海拔动子模块550移动。当低海拔动子基座552上的第一卡舌551伸出与重力储能元件900的底部卡合时,低海拔动子模块550可带动重力储能元件900移动,从而实现对重力储能元件900在低海拔集散段111和低海拔缓存运送段112进行运送移动。当低海拔动子基座552上的第一卡舌551收缩与重力储能元件900的底部分离时,低海拔动子模块550与重力储能元件900分离,此时运载动子模块510可与重力储能元件900连接,或者重力储能元件900被吊起转移至低海拔堆场800。所述低海拔接送段113通过运载动子模块510和低海拔动子模块550连续交接将多个重力储能元件900串联推入所述重力储能元件移动轨道100与所述动子主轨道200对应的部分,以使多个重力储能元件900开始接收所述动子主轨道200的驱动力串联升起。
123.进一步地,请参阅图10,所述高海拔段120设有高海拔集散段121、高海拔缓存运送段122和高海拔接送段123,所述高海拔集散段121与所述高海拔堆场700对接,用以对所述重力储能元件900集散运输,所述高海拔缓存运送段122将所述重力储能元件900在所述高海拔集散段121和所述高海拔接送段123之间转移运送,所述高海拔接送段123用以在释能时将所述重力储能元件900推送至所述倾斜段130。
124.本实施方式中,所述高海拔集散段121是将运送至高海拔处的重力储能元件900进行集散安置于轨道上,以待将重力储能元件900进行堆叠地存放在高海拔堆场700,或是将高海拔堆场700的重力储能元件900集散地安置于轨道上。所述高海拔缓存运送段122以将高海拔集散段121集散安置的重力储能元件900运送至高海拔接送段123,或是将高海拔接送段123的重力储能元件900运送至高海拔集散段121集散安置。所述高海拔接送段123是从高海拔弧形段132的升起的重力储能元件900接收并运送至高海拔缓存运送段122,或是将高海拔缓存运送段122所运送过来的重力储能元件900推送至高海拔弧形段132。高海拔接送段123的推动动力来自动子主轨道200上的运载动子模块510传递到重力储能元件900,重力储能元件900串联顶推至高海拔接送段123。重力储能元件900在高海拔接送段123通过辅助动子515与第二运载定子440配合从而获得推动力。
125.进一步地,所述重力储能元件移动轨道100还包括固定于所述高海拔集散段121和所述高海拔缓存运送段122的高海拔定子,所述重力储能元件移动轨道100还包括与所述高海拔集散段121和所述高海拔缓存运送段122滑动配合的高海拔动子模块,所述高海拔动子模块设有可伸缩地第二卡舌,当所述第二卡舌与所述重力储能元件900的底部卡合,所述高海拔动子模块带动所述重力储能元件900移动,当所述第二卡舌与所述重力储能元件900的底部分离,所述高海拔动子模块与所述重力储能元件900分离。
126.本实施方式中,高海拔直线电机定子与低海拔直线电机定子结构相同,高海拔动子模块与低海拔动子模块结构相同,第二卡舌与第一卡舌结构相同,故在此不再赘述。在高海拔集散段121和高海拔缓存运送段122的底部设有第二增高轨台,以便于在重力储能元件900与地面之间腾出更多空间,从而便于在重力储能元件900的底部与底面之间安装高海拔定子和高海拔动子模块。所述第二增高轨台的内侧设有第二台阶,第二台阶上设有高海拔
动子滑轨,高海拔动子滑轨与高海拔动子模块滑动配合,以便于高海拔动子可驱动重力储能元件900在高海拔处移动。当第二卡舌伸出与重力储能元件900的底部卡合时,高海拔动子模块可带动重力储能元件900移动,从而实现对重力储能元件900在高海拔集散段121和高海拔缓存运送段122进行运送移动。当第二卡舌收缩与重力储能元件900的底部分离时,高海拔动子模块与重力储能元件900分离,或者重力储能元件900被吊起转移至高海拔堆场700。
127.进一步地,所述低海拔堆场800设有与所述低海拔段110对接的低海拔码垛区810,所述低海拔码垛区810用以在系统释能时将所述重力储能元件900堆叠存储,所述高海拔堆场700设有与所述高海拔段120对接的高海拔码垛区710,所述高海拔码垛区710用以在系统储能时将所述重力储能元件900堆叠存储。
128.本实施方式中,低海拔码垛区810从低海拔集散段111接收重力储能元件900,并将重力储能元件900以多行多列的形式进行堆叠存放,以节省占地面积。当储能系统2000需要进行释放重力势能并回馈电能至电网时,处于高海拔处于的重力储能元件900以固体重力流的形式经重力储能元件移动轨道100流动至低海拔集散段111,并在低海拔集散段111被转移堆叠存放至低海拔码垛区810。当储能系统2000需要将电网的电能转换成重力势能进行存储时,低海拔码垛区810堆叠存放的重力储能元件900被转移至低海拔集散段111,并以固体重力流的形式被连续不停地流动运送至高海拔处,从而实现重力势能存储。高海拔码垛区710从高海拔集散段121接收重力储能元件900,并将重力储能元件900以多行多列的形式进行堆叠存放,以节省占地面积。当储能系统2000需要进行释放重力势能并回馈电能至电网时,高海拔码垛区710的重力储能元件900被转移至高海拔集散段121,并在高海拔集散段121以固体重力流的形式经重力储能元件移动轨道100流动至低海拔处。
129.进一步地,请参阅图11和图12,所述低海拔码垛区810和所述高海拔码垛区710均设有横向轨道樑820、与横向轨道樑820配合的行车大车821、与行车大车821配合的左码垛行车830及右码垛行车840和装卸行车860,所述左码垛行车830和所述右码垛行车840在所述低海拔段110或高海拔段120的左右两侧运行,所述装卸行车860在所述低海拔段110或所述高海拔段120的上方运行,用以将所述低海拔段110或所述高海拔段120上的重力储能元件900卸载至所述低海拔段110或所述高海拔段120的左右两侧,再由所述左码垛行车830和所述右码垛行车840分别将重力储能元件900堆叠至所述低海拔段110或所述高海拔段120两旁的堆垛区。
130.本实施方式中,所述横向轨道樑820可以对左码垛行车830进行移动导向,以使得左码垛行车830可以在左侧堆叠区域移动,以转移或安放左侧堆叠区域的重力储能元件900。所述横向轨道樑820可以对右码垛行车840进行移动导向,以使得右码垛行车840可以在又侧堆叠区域移动,以转移或安放又侧堆叠区域的重力储能元件900,从而使得在低海拔码垛区810和高海拔码垛区710都设有左右堆叠区域进行堆叠安放重力储能元件900,或是快速从左右堆叠区域转移重力储能元件900至重力储能元件移动轨道100上。
131.本实施方式中,装卸行车860可以左右移动,以便于将重力储能元件900吊起后向低海拔集散段111的轨道或高海拔集散段121的轨道左右两侧转移重力储能元件900。所述装卸行车860上设有吊钩,吊钩可以将重力储能元件900吊起,以实现对重力储能元件900进行转移堆叠存放。
132.进一步地,请参阅图13和图14,所述重力储能元件900包括箱体910、转动连接于所述箱体910底部的四个滚轮(滚轮可以是多对,或多组)920和滑动伸缩于所述箱体910两侧的伸缩臂930,所述箱体910内用以收容固体重力物,所述四个滚轮920用以与所述重力储能元件移动轨道100滚动配合,所述伸缩臂930可伸长或缩短,当所述伸缩臂930伸长时,所述伸缩臂930与所述运载动子模块510连接,当所述伸缩臂930缩短时,所述伸缩臂930与所述运载动子模块510分离。
133.本实施方式中,箱体910为矩形壳体。箱体910内填充固体重力物,该固体重力物可以是自然界最基本的物资,例如该固体重力物可以是沙、土、石头等。四个滚轮920分别两两与重力储能元件移动轨道100的两个铁轨101滚动配合,以使得重力储能元件900可呈固体重力流的形式在流动运行。两个所述伸缩臂930可伸长或缩短,当伸缩臂930伸长时,伸缩臂930与连接推台513抵持,以接收运载动子模块510的推顶力,从而使得运载动子模块510可推顶运载动子模块510运动,或者是重力储能元件900带动运载动子模块510运动。当伸缩臂930缩短时,重力储能元件900与运载动子模块510分离,从而便于运载动子模块510可被转移至动子辅轨道300返回循环运作,而重力储能元件900可以被转移、存储。所述箱体910、伸缩臂930和滚轮920均采用钢制材料,使得重力储能元件900结构稳固、耐用、制造成本低、且质量密度大。
134.进一步地,所述箱体910的前后两端分别设有顶推凸台940和凹台950,所述顶推凸台940和所述凹台950分别与所述箱体910前后相邻的两个重力储能元件900抵顶,在固体重力升降通道上串联,形成固体重力流。
135.本实施方式中,所述顶推凸台940和凹台950分别固定于箱体910的前后两端。顶推凸台940和凹台950均位于箱体910外侧。顶推凸台940远离箱体910的端部设有弧形凸起941,而凹台950的端部设有弧形凹陷951。当相邻两个重力储能元件900的顶推凸台940与凹台950相互抵顶时,弧形凸起941与弧形凹陷951相配合,以便于相邻两个重力储能元件900形成有效的连接,进而有效地形成固体重力流,而在固体重力流完成了重力势能存储或是重力势能释放后,多个重力储能元件900通过弧形凸起941与弧形凹陷951快速分离从而实现相互快速分离,进而便于重力储能元件900快速地被转移、存储。当然,在其他实施方式中,也可以是顶推凸台940的端部设有弧形凹陷951,凹台950的端部设有弧形凸起941。
136.进一步地,所述箱体910顶部设有车轮凹陷960,所述车轮凹陷960用以在供重力储能元件900相互堆叠时收容所述滚轮920的一部分。
137.本实施方式中,箱体910顶部设有四个车轮凹陷960,车轮凹陷960的深度稍大于滚轮920伸出箱体910的高度一致。当重力储能元件900堆叠时,其中一个重力储能元件900的滚轮920凸出箱体910的部分刚好收容于另一个重力储能元件900的车轮凹陷960内,且上面的重力储能元件900底部抵触于下面的重力储能件的顶部,以使得堆叠的重力储能元件900堆叠稳固。
138.进一步地,所述重力储能元件移动轨道100还设有制动轨190,所述箱体910底部还设有可滑动伸缩的制动闸片970,当所述制动闸片970伸长抵持于所述制动轨190的侧壁时,所述制动轨190阻止所述重力储能元件900运动,当所述制动闸片970收缩与所述制动轨190分离时,所述制动轨190与所述重力储能元件900分离。
139.本实施方式中,所述制动轨190位于两个铁轨101中间。所述制动轨190平行两个铁
轨101延伸。箱体910底部设有制动凹槽911,两个制动闸片970均可伸缩地连接于制动凹槽911的两个侧壁上。制动轨190可收容于制动凹槽911内,且制动轨190位于连个制动闸片970之间。当两个制动闸片970相对制动凹槽911的侧壁伸出时,两个制动闸片970相互靠拢,两个制动闸片970可夹持制动轨190,从而使得制动闸片970与制动轨190之间产生制动摩擦阻力,该制动摩擦阻力阻止重力储能元件900在铁轨101上移动,从而实现对重力储能元件900进行制动。当两个制动闸片970相对制动凹槽911的侧壁收缩时,两个制动闸片970相互远离,两个制动闸片970与制动轨190之间存在间隙,从而重力储能元件900不受任何制动力限制,重力储能元件900可快速地在铁轨101上移动。
140.进一步地,所述箱体910相对的两侧壁设有卡勾槽980,所述卡勾槽980用以与行车吊钩卡合,以供行车吊起所述重力储能元件900。所述卡勾槽980设置于箱体910的上部,且位于箱体910的两侧,以便于所述装卸行车860上的吊钩与卡勾槽980配合,从而实现装卸行车860上的吊钩将重力储能元件900吊起。
141.进一步地,请参阅图15,所述储能系统2000还包括系统主控制器2100、电网接入装置2200和低频电网2300,所述电网接入装置2200电连接所述直线电机定子组400,所述直线电机动子组500与所述直线电机定子组400电磁耦合。所述系统主控制器2100控制电网接入装置2200将低频电网的电能输入至直线电机定子组400和直线电机动子组500产生动力,以使得倾斜段130全程的重力储能元件900以固体重力流的形式从低海拔处向高海拔处转移运送,从而实现将低频电网的电能转换成动能改变固体重力储能元件的位能,进行存储。系统主控制器2100还控制电子定子组和直线电机动子组500将高海拔处的重力储能元件900推送至重力储能元件移动轨道100的倾斜段130,以使得倾斜段130全程的重力储能元件900以固体重力流的形式从高海拔向低海拔处运送,从而使得重力势能转换成电能,并且控制电网接入装置2200接收主动力定子410与主动力动子512耦合产生的电能回馈至低频电网。
142.进一步地,所述储能系统2000还包括低海拔堆场控制模块2400和高海拔堆场控制模块2500,所述低海拔堆场控制模块2400用以控制所述低海拔堆场800的重力储能元件900与所述低海拔段110分离或装载,所述高海拔堆场控制模块2500用以控制所述高海拔堆场700的重力储能元件900与所述高海拔段120分离或装载,所述主控制器电连接所述低海拔堆场控制模块2400和所述高海拔堆场控制模块2500。所述低海拔堆场控制模块2400控制低海拔堆场800的重力储能元件900运行。高海拔堆场控制模块2500控制高海拔堆场700的重力储能元件900运动,以便于储能系统2000储能或释能自动化。
143.以上是申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离申请原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为申请的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1