漂浮式风电机的方向调节方法及其装置与流程
1.本公开涉及风电技术领域,尤其涉及一种漂浮式风电机的方向调节方法、装置、电子设备及存储介质。
背景技术:
2.风力发电是一种发展较早、目前已较为成熟的新能源发电技术,其地位已愈发重要。随着风电技术逐渐由陆上转移到海上,海上风力发电已经成为可再生能源发展领域的焦点。然而,在极端天气或不可控因素下,会因为电网故障问题而导致风机失去外网电力支持,届时将会对风机运行产生极大的危害。并且基于海上风电项目所处位置水深越来越大,漂浮式风电机组必然成为发展趋势。漂浮式风电机组的基础漂浮在海面上,受到洋流、固定锁、海风等的综合作用,造成风机偏航准确度很难满足风机要求。这种情况下,风机偏航系统会频繁启动。
3.公开内容
4.本公开旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本公开的一个目的在于提出一种漂浮式风电机的方向调节方法。
6.本公开的第二个目的在于提出一种漂浮式风电机的方向调节装置。
7.本公开的第三个目的在于提出一种电子设备。
8.本公开的第四个目的在于提出一种非瞬时计算机可读存储介质。
9.为达上述目的,本公开第一方面实施方式提出了一种漂浮式风电机的方向调节方法,包括:获取所述漂浮式风电机的叶轮朝向;获取环境风的第一实时状态信息和洋流的第二实时状态信息,其中,所述第一实时状态信息包括所述环境风的风向;根据所述第一实时状态信息和所述第二实时状态信息,调整所述叶轮朝向,直至所述叶轮朝向与所述环境风的风向相同。
10.根据本公开的一个实施方式,所述根据所述第一实时状态信息和所述第二实时状态信息,调整所述叶轮朝向,还包括:获取所述环境风的风向和所述叶轮朝向的第一角度差值;响应于所述第一角度差值大于调整阈值,根据所述第一实时状态信息和所述第二实时状态信息,确定所述叶轮的转向信息。
11.根据本公开的一个实施方式,所述第一实时状态信息还包括第一作用力,所述第二实时状态信息还包括洋流方向和洋流的第二作用力,所述根据所述第一实时状态信息和所述第二实时状态信息,确定所述叶轮的转向信息,还包括:根据所述环境风的风向和所述洋流方向,获取第二角度差值;根据所述第二角度差值、所述第一作用力和所述第二作用力,确定所述转向信息。
12.根据本公开的一个实施方式,所述根据所述第二角度差值、所述第一作用力和所述第二作用力,确定所述转向信息,还包括:根据当前时刻与转向定时周期,获取所述叶轮的调整时刻;根据所述第一角度差值,确定所述叶轮的转向朝向和转向量;根据所述第一作用力和所述第二作用力,确定所述叶轮的转向力的大小。
13.根据本公开的一个实施方式,所述方法还包括:响应于所述第一角度差值小于调整阈值,启动自动调节系统;控制自动调节系统根据所述转向信息驱动所述叶轮朝向调整,直至所述叶轮朝向与所述环境风的风向相同。
14.根据本公开的一个实施方式,所述方法还包括:获取所述转向力的第一力偶的大小及所述第一力偶的方向;获取所述洋流作用力的第二力偶及所述第二力偶的方向;根据所述第一力偶的大小和所述第一力偶的方向,以及所述第二力偶大小和所述第二力偶的方向,对所述漂浮式风电机进行告警。
15.根据本公开的一个实施方式,所述根据所述第一力偶的大小和所述第一力偶的方向,以及所述第二力偶大小及所述第二力偶的方向,对所述漂浮式风电机进行告警,还包括:响应于所述第一力偶的方向与所述第二力偶的方向相反,且第一力偶的大小大于第二力偶的大小,则对所述漂浮式风电机进行告警。
16.为达上述目的,本公开第二方面实施例提出了一种漂浮式风电机的方向调节装置,包括:第一获取模块,用于获取所述漂浮式风电机的叶轮朝向;第二获取模块,用于获取环境风的第一实时状态信息和洋流的第二实时状态信息,其中,所述第一实时状态信息包括所述环境风的风向;调整模块,用于根据所述第一实时状态信息和所述第二实时状态信息,调整所述叶轮朝向,直至所述叶轮朝向与所述环境风的风向相同。
17.根据本公开的一个实施方式,所述调整模块,还用于:获取所述环境风的风向和所述叶轮朝向的第一角度差值;响应于所述第一角度差值大于调整阈值,根据所述第一实时状态信息和所述第二实时状态信息,确定所述叶轮的转向信息。
18.根据本公开的一个实施方式,所述调整模块,还用于:根据所述环境风的风向和所述洋流方向,获取第二角度差值;根据所述第二角度差值、所述第一作用力和所述第二作用力,确定所述转向信息。
19.根据本公开的一个实施方式,所述调整模块,还用于:根据当前时刻与转向定时周期,获取所述叶轮的调整时刻;根据所述第一角度差值,确定所述叶轮的转向朝向和转向量;根据所述第一作用力和所述第二作用力,确定所述叶轮的转向力的大小。
20.根据本公开的一个实施方式,所述调整模块,还用于:响应于所述第一角度差值小于调整阈值,启动自动调节系统;控制自动调节系统根据所述转向信息驱动所述叶轮朝向调整,直至所述叶轮朝向与所述环境风的风向相同。
21.根据本公开的一个实施方式,所述调整模块,还用于:获取所述转向力的第一力偶的大小及所述第一力偶的方向;获取所述洋流作用力的第二力偶及所述第二力偶的方向;根据所述第一力偶的大小和所述第一力偶的方向,以及所述第二力偶大小和所述第二力偶的方向,对所述漂浮式风电机进行告警。
22.根据本公开的一个实施方式,所述调整模块,还用于:响应于所述第一力偶的方向与所述第二力偶的方向相反,且第一力偶的大小大于第二力偶的大小,则对所述漂浮式风电机进行告警。
23.为达上述目的,本公开第三方面实施例提出了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以实现如本公开第一方面实施例所述的漂浮式风电机的方向调节方法。
24.为达上述目的,本公开第四方面实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于实现如本公开第一方面实施例所述的漂浮式风电机的方向调节方法。
25.为达上述目的,本公开第五方面实施例提出了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时用于实现如本公开第一方面实施例所述的漂浮式风电机的方向调节方法。
附图说明
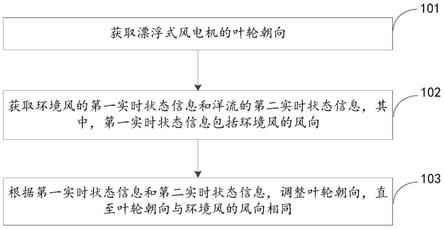
26.图1是本公开一种漂浮式风电机的方向调节方法的一种示例性实施方式的示意图;
27.图2是本公开另一种漂浮式风电机的方向调节方法的一种示例性实施方式的示意图;
28.图3是本公开一种漂浮式风电机的风向调节板的结构示意图;
29.图4是本公开另一种漂浮式风电机的方向调节方法的一种示例性实施方式的示意图;
30.图5是本公开另一种漂浮式风电机的方向调节方法的一种示例性实施方式的示意图;
31.图6是本公开一种漂浮式风电机的洋流作用力和转向力力偶的坐标图;
32.图7是本公开一种漂浮式风电机的方向调节装置的结构框图;
33.图8是本公开一种漂浮式风电机的电子设备的结构框图。
具体实施方式
34.下面详细描述本公开的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本公开,而不能理解为对本公开的限制。
35.图1为本公开提出的一种漂浮式风电机的方向调节方法的一种示例性实施方式的示意图,如图1所示,该漂浮式风电机的方向调节方法包括以下步骤:
36.s101,获取漂浮式风电机的叶轮朝向。
37.漂浮式发电机的正常的工作状态为叶轮正对风向,即叶轮平面与风向呈90
°
垂直状态。当叶轮朝向不是正对风向时,风力对叶轮的作用力效果会减小,甚至会阻碍叶轮的正常转动发电,降低叶轮转动发电的效率。因此,我们需要将叶轮时刻调整至正对风向,在此工作状态下,漂浮式发电机的风能转化率最高。
38.由于海上海况复杂,漂浮式风电机无法一直保持正对风向的状态,因此我们需要实时对漂浮式发电机的方向进行调整。调整前,我们需要获取漂浮式发电机的叶轮朝向。
39.在本公开实施例中,获取漂浮式发电机的叶轮朝向的方法可为多种。举例来说,可通过方向测量装置获取漂浮式发电机的叶轮朝向,需要说明的是,方向测量装置可为指向仪、基于“霍尔效应”指向传感器等;可选地,还可通过卫星定位来确定漂浮式发电机的叶轮朝向,具体地,可通过卫星获取漂浮式发电机的移动轨迹,通过对移动轨迹进行分析,确定漂浮式发电机的叶轮朝向。
40.s102,获取环境风的第一实时状态信息和洋流的第二实时状态信息,其中,第一实时状态信息包括环境风的风向。
41.需要说明的是,环境风的第一实时状态信息还可包括环境风作用在漂浮式风电机风力大小、风速大小等,洋流的第二实时状态信可包括洋流的流速、流向等。
42.在本公开实施例中,可通过风向仪采集环境风的第一实时状态信息,可通过洋流信息采集装置采集洋流的第二实时状态信息。
43.s103,根据第一实时状态信息和第二实时状态信息,调整叶轮朝向,直至叶轮朝向与环境风的风向相同。
44.在本公开实施例中,可通过第一实时状态信息和第二实时状态信息,分析出环境风以及洋流对叶轮造成的影响,并根据分析结果确定调整策略,最后根据调整策略调整叶轮朝向。
45.在本公开实施例中,首先获取漂浮式风电机的叶轮朝向,然后获取环境风的第一实时状态信息和洋流的第二实时状态信息,其中,第一实时状态信息包括环境风的风向,最后根据第一实时状态信息和第二实时状态信息,调整叶轮朝向,直至叶轮朝向与环境风的风向相同。由此,根据对海风和洋流采集的数据,调整漂浮式风电机的叶轮朝向,从而增加漂浮式风电机的发电效率,节省发电成本。
46.上述实施例中,根据第一实时状态信息和第二实时状态信息,调整叶轮朝向,还可通过图2进一步解释,该方法包括:
47.s201,获取环境风的风向和叶轮朝向的第一角度差值。
48.在本公开实施例中,在获取到获取环境风的风向和叶轮朝向后,可将获取环境风的风向和叶轮朝向通过第一角度差值生成算法进行计算,以获取第一角度差值。
49.需要说明的是,该第一角度差值生成算法可为提前设置好的,并存储在电子设备的存储空间中,以方便在需要时调取使用。
50.s202,响应于第一角度差值大于调整阈值,根据第一实时状态信息和第二实时状态信息,确定叶轮的转向信息。
51.在获取到第一角度差值后,可根据第一角度差值的大小,确定转向力的方向。通常我们取转向较小的角作为转向力的角度,即需要保证转向力<180
°
。由此,我们可以通过第一角度差值对转向进行优化,可以大大节约转向成本。
52.实现中,当响应于第一角度差值小于一定角度时,漂浮式发电机可通过风力自动调整叶轮朝向至正对风向,此时,没有必要再通过外力对漂浮式发电机的移动轨迹进行干预。
53.需要说明的是,上述实施例中的调整阈值并不唯一。举例来说,该调整阈值可为5
°
、10
°
等,此处不作任何限定,可根据实际情况进行设定。
54.在本公开实施例中,首先获取环境风的风向和叶轮朝向的第一角度差值,然后响应于第一角度差值大于调整阈值,根据第一实时状态信息和第二实时状态信息,确定叶轮的转向信息。由此,通过设定调整阈值,判断此时漂浮式发电机的移动状态是否需要进行干预,从而可以降低调整漂浮式发电机转向的能耗,节省成本。
55.进一步地,响应于第一角度差值小于调整阈值,启动自动调节系统,控制自动调节系统根据转向信息驱动叶轮朝向调整,直至叶轮朝向与环境风的风向相同。
56.在本公开实施例中,漂浮式发电机可通过安装风向调节板来自动调整风向调节板的叶轮朝向。具体地,当第一角度差值小于调整阈值时,漂浮式发电机可启动风向调节板,通过风力对风向调节板的作用力,来实现推动漂浮式发电机进行转向,直至叶轮朝向与环境风的风向相同。
57.如图3所示,该风向调节板可为三角形板,当风向调节板与风向存在一定角度时,风与风向调节板之间接触面积较大。风力通过风向调节板推动漂浮系统转向,直至风向瘦三角形状的风向调节板的两侧受力相同。风向变化在一定范围内或者风向缓慢变化时,风向调节板可实时调节风向。这减少了动力调节的时长和频次,避免了常规偏航系统的频繁启动问题。
58.上述实施例中,第一实时状态信息还包括第一作用力,第二实时状态信息还包括洋流方向和洋流的第二作用力,根据第一实时状态信息和第二实时状态信息,确定叶轮的转向信息,还可通过图4进一步解释,该方法包括:
59.s401,根据环境风的风向和洋流方向,获取第二角度差值。
60.在本公开实施例中,可通过传感器测量环境风的第一作用力和洋流的第二作用力。
61.可选地,还可通过将自然风风向、自然风风速、洋流速度和洋流方向通过作用力算法计算出第一作用力和第二作用力。可以理解的是,不同型号的漂浮式发电机在同一风向、风速、洋流速度和洋流方向的受力可为不同,因此对不同型号的漂浮式发电机,作用力算法不同,可提前将算法设置好,并存储在电子设备的存储空间中,以方便调取使用。
62.进一步地,通过对环境风的风向和洋流方向进行计算,获取第二角度差值。
63.s402,根据第二角度差值、第一作用力和第二作用力,确定转向信息。
64.具体地,可根据当前时刻与转向定时周期,获取叶轮的调整时刻,然后根据第一角度差值,确定叶轮的转向朝向和转向量,最后根据第一作用力和第二作用力,确定叶轮的转向力的大小。
65.实现中,由于洋流、风力等因素,在漂浮式风电机转向过程中,我们需要对其转向速度进行控制,以免由于转向过快或者过慢而造成损失。通过设置调整时刻,可以控制漂浮式风电机的转向速度,大大增加漂浮式风电机转向的安全性。
66.在本公开实施例中,首先根据环境风的风向和洋流方向,获取第二角度差值,然后根据第二角度差值、第一作用力和第二作用力,确定转向信息。由此,通过获取第一实时状态信息和第二实时状态信息,确定转向信息,可以准确控制漂浮式风电机转向。
67.上述实施例中,确定叶轮的转向力的大小之后,还可通过图5进一步解释,该方法包括:
68.s501,获取转向力的第一力偶的大小及第一力偶的方向。
69.在本公开实施例中,可通过转向力作用在漂浮式风电机上的力矩和作用力方向,来计算第一力偶的大小。举例来说,如图6所示,可通过如下公式计算转向力的第一力偶。
70.m
力
=f
力
*r
71.其中,f1、f2、f3为作用在漂浮式风电机上的转向力,r为力矩,m
力
第一力偶。如图所示,第一力偶为顺时针方向。
72.s502,获取洋流作用力的第二力偶及第二力偶的方向。
73.在本公开实施例中,可通过洋流作用力作用在漂浮式风电机上的力矩和作用力方向,来计算第二力偶的大小。如图6所示,可通过如下公式计算转向力的第二力偶。
74.m
水
=f
水
*l
75.其中,f
水
为作用在漂浮式风电机上的洋流作用力,l为作用在漂浮式风电机上的力矩,m
水
为第二力偶。如图所示,第二力偶为逆时针方向。
76.s503,根据第一力偶的大小和第一力偶的方向,以及第二力偶大小和第二力偶的方向,对漂浮式风电机进行告警。
77.在本公开实施例中,第一力偶和第二力偶的方向可为相同,也可为相反,当第一力偶和第二力偶的方向相同时,第二力偶可协助转向力,使漂浮式风电机进行转向;当第一力偶和第二力偶的方向相反时,第二力偶阻碍转向力,此时需要保证第一力偶大于第二力偶。
78.举例来说,如图6所示,当m
力
与m
水
同向时,m
水
帮助水浆系统旋转漂浮系统;当m
力
与m
水
反向时,m
水
阻碍水浆系统旋转漂浮系统,必须保证|m
力
|》|m
水
|。
79.进一步地,当当m
力
与m
水
反向,且|m
力
|>|m
水
|时,需要对对漂浮式风电机进行告警。
80.图7为本公开提出的一种漂浮式风电机的方向调节装置的示意图,如图7所示,该漂浮式风电机的方向调节装置700,包括:第一获取模块710、第二获取模块720、调整模块730。
81.其中,第一获取模块710,用于获取漂浮式风电机的叶轮朝向。
82.第二获取模块720,用于获取环境风的第一实时状态信息和洋流的第二实时状态信息,其中,第一实时状态信息包括环境风的风向。
83.调整模块730,用于根据第一实时状态信息和第二实时状态信息,调整叶轮朝向,直至叶轮朝向与环境风的风向相同。
84.在本公开的一个实施例中,调整模块730,还用于:获取环境风的风向和叶轮朝向的第一角度差值;响应于第一角度差值大于调整阈值,根据第一实时状态信息和第二实时状态信息,确定叶轮的转向信息。
85.在本公开的一个实施例中,调整模块730,还用于:根据环境风的风向和洋流方向,获取第二角度差值;根据第二角度差值、第一作用力和第二作用力,确定转向信息。
86.在本公开的一个实施例中,调整模块730,还用于:根据当前时刻与转向定时周期,获取叶轮的调整时刻;根据第一角度差值,确定叶轮的转向朝向和转向量;根据第一作用力和第二作用力,确定叶轮的转向力的大小。
87.在本公开的一个实施例中,调整模块730,还用于:响应于第一角度差值小于调整阈值,启动自动调节系统;控制自动调节系统根据转向信息驱动叶轮朝向调整,直至叶轮朝向与环境风的风向相同。
88.在本公开的一个实施例中,调整模块730,还用于:获取转向力的第一力偶的大小及第一力偶的方向;获取洋流作用力的第二力偶及第二力偶的方向;根据第一力偶的大小和第一力偶的方向,以及第二力偶大小和第二力偶的方向,对漂浮式风电机进行告警。
89.在本公开的一个实施例中,调整模块730,还用于:响应于第一力偶的方向与第二力偶的方向相反,且第一力偶的大小大于第二力偶的大小,则对漂浮式风电机进行告警。
90.为了实现上述实施例,本公开实施例还提出一种电子设备800,如图8所示,该电子设备800包括:处理器801和处理器通信连接的存储器802,存储器802存储有可被至少一个
处理器执行的指令,指令被至少一个处理器801执行,以实现如本公开第一方面实施例的漂浮式风电机的方向调节方法。
91.为了实现上述实施例,本公开实施例还提出一种存储有计算机指令的非瞬时计算机可读存储介质,其中,计算机指令用于使计算机实现如本公开第一方面实施例的漂浮式风电机的方向调节方法。
92.为了实现上述实施例,本公开实施例还提出一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现如本公开第一方面实施例的漂浮式风电机的方向调节方法。
93.在本公开的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。
94.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本公开的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
95.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
96.尽管上面已经示出和描述了本公开的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本公开的限制,本领域的普通技术人员在本公开的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1