一种中空纤维驱动器及其制备方法及在微流体操控中的应用
1.本发明属于柔性驱动材料领域,具体是一种螺旋型中空纤维驱动器的制备 方法及其在区分不同温度液体的微流体操控中的应用。
背景技术:
2.微流体操控能够精确输送微量液体,是现代医疗诊断、化学合成、生物传 感及分析中应用广泛的一项技术。精确传感并控制流体的流量及输送流体的温 度、浓度等一系列参数以满足微量反应的反应要求是其中的一项关键问题。传 统的微流体操控装置需要外置电机和传感器等多种器件以满足液体输送和筛选 的需求,因此难以适用于封闭装置中的狭小空间;此外,由于输送液体的高流 速,需要快速感应和控制。因此,获得流过微管的微量液体的实时数据和快速 操纵流体的紧凑型多功能微流体系统是一项挑战。
3.近年来,刺激响应材料代替传统电机与微孔道结合,实现了微流体控制。 用于微流控的典型驱动材料包括磁性或电活性材料、水凝胶和液晶聚合物,它 们受磁场、电场、光、温度或ph控制。磁、电和光刺激总是需要额外的设备, 而水凝胶受到机械强度低、驱动力弱和响应时间长的限制。此外,这些响应材 料总是需要特定的化学组分或复杂的制备程序,这与使用普通管材的现有微流 体系统不兼容。因此,非常需要通过使用现有的商业管材料开发一种类似于实 时传感和操纵传输流体的微流体操控技术。
4.捻曲状纤维可以通过体积膨胀产生旋转和拉伸驱动,显示出较大的驱动行 程和驱动应力,由其制备的多种可逆/不可逆驱动器在软体机器人和智能控制方 面均呈现了广阔的应用潜力。但作为衡量捻曲纤维驱动能力重要参数,由加捻 产生的扭转角αf=tan-1
(πdt)(t:加捻密度,r:纤维直径)总是表现出纤维表面比 纤维中心更高的性质,因此常见的实心纤维因存在扭转角接近于零的芯部而造 成纤维实际扭转角小,从而限制了其驱动行程和的单位质量驱动力。其次,热 响应驱动器响应时间高度依赖于聚合物纤维中的热传递速率,增加热对流方式 的传热系数,增大纤维的比表面积及减小纤维直径等方法均可有效改善响应时 间,但现有固体纤维因热传递的比表面积小、空气对流传热系数小而驱动速率 较低,且流体驱动固体纤维对于应用场景及驱动介质回收仍然存在问题。因此, 利用中空纤维结构可有效提高从液体到驱动器的热传递,从而提高驱动器的响 应速率。并将微流体传输与驱动更好地结合。
5.除此之外,虽然可逆驱动因其高循环寿命而备受期待,但在心脏支架等智 能材料制造领域,一次性驱动器也是不可或缺的组成部分。通过不同的制造方 式将一次性和可逆驱动完全与一种软材料结合起来,可在智能材料和设备领域 提供新趋势,并在生物医学、传感器和探测器、可穿戴设备和软机器人等广泛 领域提供灵感。
技术实现要素:
6.本发明主要目的为了解决狭小空间内微流体实时温度感测和传输的问题, 以及针对常规驱动器响应速度慢、驱动行程小、做功能力差、功率密度低以及 价格昂贵等问题,
本发明使用螺旋中空纤维驱动器,提供了一种可以感测液体 温度并对液体进行分选的紧凑型微流体操控系统,通过感测输送液体的温度来 控制流出位置。
7.本发明解决其技术问题所采用的技术方案如下:
8.一种中空纤维驱动器,选取通用聚合物材料中空纤维作为制备驱动器的原 材料。该类材料具有价格低廉,容易获取,性质稳定等优势,能够良好的保证 驱动器的机械性能。所述中空纤维(1)材料适用于现有各类聚合物材料,包括但 不限于聚乙烯(pe)、聚丙烯(pp)、聚酰胺6(pa6)、聚酰胺66(pa66)、聚 乳酸(pla)、聚己内酯(pcl)、聚丙烯腈(pan)、聚碳酸酯(pc)、聚偏二氟 乙烯(pvdf)、聚对苯二甲酸乙二醇酯(pet)、聚四氟乙烯(ptfe)、热塑性 弹性体(tpu)、聚氨酯(pu)、液晶聚合物(lcp)、水凝胶等任一聚合物材料。
9.本发明所述中空纤维驱动器包括中空纤维扭转驱动器及中空纤维伸缩驱动 器两种,二者均由聚合物中空纤维经加捻形成的捻曲纤维制备得到。将具有捻 曲结构的所述扭转驱动器绕实心柱形成螺旋结构可得到中空纤维伸缩驱动器。
10.进一步地,上述中空纤维作为扭转驱动器的制备方法包括以下步骤:
11.步骤一:加捻前,将直径略小于中空纤维内径的金属丝插入纤维内作为内 部支撑,防止加捻过程中芯部中空结构坍塌。
12.步骤二:将中空纤维的顶端与步进电机相连,底端负载一定重量的重物以 保证纤维处于张紧状态。在加捻过程中,束缚纤维底端以避免捻度释放。用于 支撑的金属丝在加捻过程中未被固定,以保证其在样品制备后容易移除。
13.步骤三:将步骤二中的纤维两端固定并加热退火一段时间定形。
14.步骤四:将步骤三中的纤维冷却至室温并去除内部金属丝后得到扭转中空 纤维驱动器。具体工艺参数依聚合物纤维的种类与特性而定。
15.进一步地,所述中空聚合物纤维经加捻固定后内部形成捻曲结构,当对具 有捻曲结构聚合物中空纤维中通入流动的热流体时,纤维发生旋转。中空纤维 驱动器通过热流体产生旋转表明其感测温度并对微流体进行扭转操纵的可能性。
16.进一步地,所述中空纤维作为可逆伸缩驱动器的制作步骤包括:
17.步骤1:加捻前,将直径略小于中空纤维内径的金属丝插入纤维内,作为内 部支撑。
18.步骤2:含中空纤维的顶端与步进电机相连,其底端负载一定重量的重物以 保证纤维处于张紧状态。在加捻过程中,束缚纤维底端以避免捻度释放。用于 固定的金属丝在加捻过程中未被固定,以保证其在样品制备后容易移除。
19.步骤3:通过将步骤2得到的纤维螺旋盘绕在一中心轴上,依据盘绕方向与 加捻方向的异同区分为同手性螺旋(盘绕方向与加捻方向相同)及异手性螺旋 (盘绕方向与加捻方向不同)。为保证较大的驱动行程为了获得大的驱动行程, 螺旋盘绕时同手性纤维驱动器需要大的纤维间距以允许螺旋收缩,异手性纤维 驱动器则需要纤维紧密贴合以允许线圈伸展。
20.步骤4:将步骤3中的纤维形状固定并加热退火一段时间定形。
21.步骤5:将步骤4中的纤维冷却至室温并去除内部金属丝后得到伸缩中空纤 维驱动器。具体工艺参数依聚合物纤维的种类与特性而定。
22.进一步的,前述中空纤维驱动器通过连续切换高低温流体驱动,在不同的 负载应
力下重复驱动。
23.进一步的,根据扭转角公式αf=tan-1
(πdt)(t:加捻密度,r:纤维直径),通 过增加加捻密度及减小纤维鞘在纤维中占比,使纤维获得更大的有效扭转角, 进而提高中空纤维驱动器的做功能力。
24.进一步的,对流动液体和中空纤维之间的热传递进行热机械建模,量化旋 转和拉伸中空纤维执行器与驱动温度及制备过程各项参数的关系,并以此指导 中空纤维驱动器用于精确微流体操控的设计和驱动机制研究。确定中空纤维驱 动器的温度变化是由流动液体(内部)的强制对流和环境(外部)空气的自然 对流造成的瞬态热传导问题,建立中空纤维驱动器任意横截面的径向热传导和 轴向热传导的一个两步模型,得到中空纤维驱动器径向和轴向温度与时间的函 数关系。
25.本发明的热机械建模包含如下几个步骤:
26.step1:造成中空纤维驱动器温度变化的流动液体(内部)的强制对流和环 境(外部)空气的自然对流的瞬态热传导分析。
27.首先,中空纤维任意截面径向瞬态热传导的控制方程为
[0028][0029]
θ(r,t)是温度,ri和ro是中空纤维内外径,热扩散系数α定义为
[0030][0031]
其中k为导热率,ρ是质量密度,c
p
是比热容。
[0032]
其次中空纤维内外表面的对流边界条件由下式给出
[0033][0034][0035]
其中hw和ha分别是流体和空气的传热系数。θw和θa则分别对应热流体和空 气的温度,其中流体的传热系数取决中空纤维的内部几何形状、表面粗糙度、 流体的物理性质以及流动状态(层流或湍流)等多个因素。
[0036]
进一步的,当如本发明中所示轴向热传导率远低于流体流速时,热流体和 径向传导是轴向传热主要因素。流体温度作为流经位置和时间的函数,代入上 述径向热传导方程可得到中空纤维在轴向上的温度分布。流体温度θw取决于初 始温度、流量、由于传递到中空纤维驱动器并最终传递到环境空气而导致的热 损失。当流速高热损失相对较低时,θw(x,t)表示为:
[0037]
θw(x,t)=θ
w0
h(vt-x)
ꢀꢀ
(5)
[0038]
θ
w0
是热流体的初始温度,v是液体流量,h(
·
)是海维赛德阶跃函数。
[0039]
step2:中空纤维驱动器任意横截面的径向热传导和轴向热传导导致中空纤 维旋转驱动的建模:
[0040]
聚合物链受热沿径向膨胀并沿轴向收缩,导致中空纤维的长度、直径和捻 度的变
化,由此产生的捻度变化与温度、加捻密度的关系可根据公式
[0041][0042]
得知,其中λ和δλ分别为螺旋取向聚合物链的长度和长度变化,引入温度参 数进一步修正,该公式可改写为
[0043][0044]
其中α
λ
和αd分别是中空纤维的轴向热膨胀系数和径向热膨胀系数,αf为前 述扭转角。δθ=θw(x,t)是从前述瞬态热传导分析中获得的温度变化。
[0045]
step3:中空纤维伸缩驱动建模:
[0046]
进一步地,基于加捻的、绕芯轴螺旋聚合物纤维的拉伸驱动机理,中空聚 合物纤维驱动器的拉伸驱动模型中,驱动产生的长度变化与温度、加捻密度的 关系可通过对旋转驱动模型的改写得到:
[0047][0048]
其中l与δl分别表示螺旋长度及螺旋长度的变化;l为加捻中空纤维的长度; n是线圈匝数。
[0049]
基于以上理论模拟得到的中空纤维驱动器驱动过程长度及旋转角度的可以 定量调整中空纤维旋转程度以满足微流体操控的需要。
[0050]
进一步地,对上述可逆驱动器通过调控热退火温度至软化点以下的某个温 度,并将驱动温度上限调整至退火温度之上,在驱动温度高于退火温度时可将 所述中空纤维作为不可逆驱动器使用,在驱动温度低于退火温度时可作为部分 可逆驱动器使用。
[0051]
本发明的有益效果是:
[0052]
1.本发明提出的一种采用热驱动的加捻中空纤维制作的驱动器,在单根中 空纤维中组装流体运输、快速传感和精确操控等功能,实现了使用普通的光学 或电子传感器与电机结合很难实现的紧凑型微量流体的快速操纵,促进了其在 微控制系统中的使用。
[0053]
2.本发明提供的驱动器是一种新型的软体驱动器,结构简单,重量轻,制 备成本低,原料均可通过商业采购获得,同时其性质高度稳定,在10,000次驱 动循环中没有性能衰减。
[0054]
3.本发明提出的螺旋结构中空纤维可以实现不同的运动模式,如旋转和平 移,拥有迄今为止管状伸缩驱动器的最快响应速度(0.88s)和最高驱行程 (87.5%)。在采用单个聚合物纤维的热响应驱动器中,它还显示出1.73j/g的最 大做功和高达40
°
/℃的热驱动旋转。
[0055]
4.本发明提出的驱动器驱动运动线性响应流体温度变化,其中中空纤维扭 转驱动器可以分辨的流体温差范围低至0.5℃。
[0056]
5.本发明通过将捻度插入聚合物纤维,提供比具有相同直径的实心纤维更 大平均偏斜角。所得聚合物中空纤维呈现为同直径固体纤维肌肉作功能力的1.5 倍,功率密度
为固体纤维肌肉的90倍。内部流体驱动极大地提高了从加热源到 管驱动器的传热效率,驱动速度比空气驱动快20倍。
[0057]
6.本发明提出的驱动器能够通过退火温度与驱动温度的调整在可逆驱动及 不可逆驱动模式间切换。
附图说明
[0058]
下面结合附图和实施例对本发明进一步说明。
[0059]
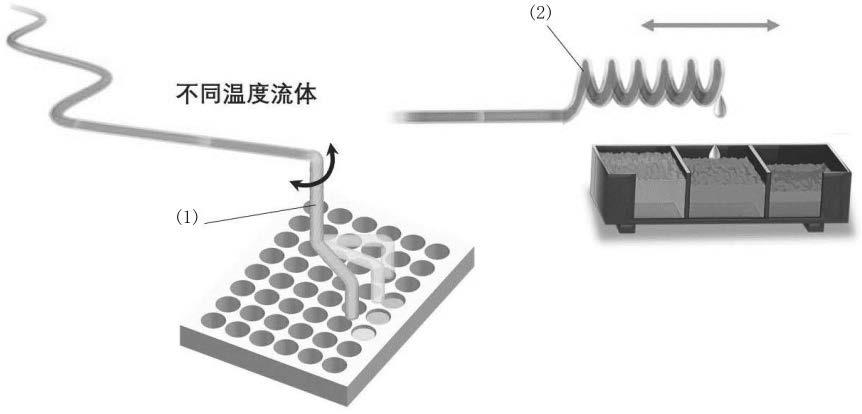
图1为本发明中空纤维驱动器用于微流体操控的示意图,其中(1)为扭转驱 动器的微流体旋转操控示意图。(2)为螺旋伸缩驱动器的微流体伸缩操控示意图。
[0060]
图2为本发明驱动器的制备方法(1)及实物图(2)。
[0061]
图3为中空纤维驱动器不同条件下的驱动性能,其中(1)为实施例1中不同 温度下中空纤维驱动器的旋转驱动。(2)为实施例2中同手性中空纤维驱动器的 10000次重复实验及响应速度。(3)为实施例2中同手性及异手性不同加捻密度 下驱动器的伸缩驱动行程。(4)为改变实施例4热退火温度以调控驱动器的可逆 /不可逆驱动。
[0062]
图4为中空纤维驱动器的做功能力。其中(1)为实施例2中空心/实心纤维 驱动响应速率对比。(2)为实施例3中不同内外径纤维热流体驱动响应速率对比。 (3)为实施例3中不同内外径纤维做功对比图。(4)为实施例5中做功性能。
[0063]
图5为旋转微流体温度筛选装置及流体温度与旋转角度的关系。可筛选温 差为0.5℃液体。
[0064]
图6为伸缩微流体筛选装置及流体温度与收缩长度的关系,可用于分选温 差范围较大液体。(2)收缩位置与所筛选流体温度的关系。
具体实施方式
[0065]
为了使本发明的目的、技术方案和优点更加清楚,下面结合具体实施例对 本发明进行详细描述,但本发明不受实施例的限制。
[0066]
本发明制备方法,结合图2说明如下:
[0067]
实施例1.
[0068]
结合图1-3,5说明本实施例。如图1(1)所示,一种以中空纤维驱动器为主 体的微流控液体温度筛选装置:通过温度驱动纤维发生旋转运动进而分选液体 的旋转微流体操控。
[0069]
具体的,所述聚乙烯中空纤维驱动器的制作步骤包括:
[0070]
步骤一:加捻前,将直径略小于中空纤维内径的金属丝插入纤维内,作为 内部支撑。
[0071]
步骤二:含中空纤维的顶端与42级伺服电机相连,其底端负载0.53mpa的重 量。在加捻过程中,束缚纤维底端以避免捻度释放。用于固定的金属丝在加捻 过程中未被固定,以保证其在样品制备后容易移除。
[0072]
步骤三:将步骤二中的纤维两端固定并加热至软化点温度一段时间定形。
[0073]
步骤四:将步骤三中的纤维冷却至室温并去除内部金属丝后得到中空纤维 扭转驱动器。具体工艺参数依聚合物纤维的种类与特性而定。
[0074]
本实施例的优点是旋转驱动的温度筛选具有高达40
°
/℃的温度灵敏度,并可 准确分辨温差为0.5℃的液体,响应速度高达1s。
[0075]
实施例2.
[0076]
本实施例是以中空纤维伸缩驱动器为主体的微流控液体温度筛选装置:通 过温度驱动纤维发生伸缩运动进而分选液体的伸缩微流体操控。结合图1-4,6 说明本实施例,本实施例对实施例1中空纤维加捻操作的进一步调整,具体的, 通过将步骤二得到的纤维螺旋盘绕在一中心轴上,得到如图2下所示螺旋中空 纤维,依据盘绕方向与加捻方向的异同区分为同手性螺旋(盘绕方向与加捻方 向相同)及异手性螺旋(盘绕方向与加捻方向不同)。其他结构与材料与实施例 1相同,经退火处理得到如图1(2)所示微流控液体温度筛选装置的主体结构 即中空聚合物纤维伸缩驱动器。
[0077]
本实施例的优点是通过温度驱动纤维发生收缩运动,进而筛选温差较大的 液体;(图3(3))通过改变加捻密度及驱动温度实现了不同的程度的伸缩驱动。
[0078]
实施例3.
[0079]
结合图4说明本实施例,本实施例中,本实施例是对实施例2中空纤维孔径 比选取的进一步调整,具体的,选取三种不同内外径比及纤维鞘厚度的聚乙烯 中空纤维,以实施例2中同样的方式进行加捻及高温退火。三种纤维加捻后形成 的扭转角相同,各纤维参数分别为:
[0080]
pe1,内径0.28mm,外径0.64mm,纤维鞘厚度与外径比为0.5;
[0081]
pe2,内径0.58mm,外径0.99mm,纤维鞘厚度与外径比为0.41;
[0082]
pe3,内径0.38mm,外径1.09mm,纤维鞘厚度与外径比为0.65。
[0083]
本实施例的优点是降低中空纤维壳层厚度及在纤维直径比例可实现响应速 度更快、做功能力更好地中空纤维驱动器。
[0084]
实施例4.
[0085]
结合图2说明本实施例,本实施例中,本实施例是对中空加捻纤维驱动器原 材料选择的进一步调整,具体的,聚丙烯中空纤维以实施例2同样的方式加捻及 盘绕,并在150℃下退火2小时制备中空聚丙烯纤维驱动器。驱动器采用热的乙 二醇液体进行驱动。
[0086]
本实施例的优点是聚丙烯材料具有较前实施例材料更高的最高驱动温度, 可对除水以外的其他高沸点液体进行感测和分选。
[0087]
实施例5.
[0088]
结合图3说明本实施例,本实施例中,本实施例是对实施例4热退火温度进 行进一步调整,具体的,选取热退火温度为室温至软化点温度下一定温度进行 中空纤维的热固定,得到不可逆及部分可逆中空纤维驱动器。驱动器在热退火 温度以下进行驱动部分为可逆驱动,在热退火及以上温度驱动为不可逆驱动。
[0089]
本实施例的优点是可通过调控退火温度及驱动温度调控中空纤维驱动器的 驱动模式。
[0090]
实施例6.
[0091]
结合图4说明本实施例,本实施例中,本实施例是对前示中空加捻纤维驱动 器原材料选择和制作过的进一步调整,具体的,尼龙6中空纤维通过在底端负载 23.4mpa应力下以实施例2同样的方式加捻至自螺旋,并在180℃下退火2小时 制备中空自螺旋尼龙6驱动
器。
[0092]
本实施例的优点是尼龙6材料具有较前实施例材料更高的温度驱动范围,且 自螺旋纤维较绕盘绕中心轴形成的螺旋纤维强度更高,从整体上将驱动器的最 大做功提高至1.72j/g,如图4(2)所示。
[0093]
本中空聚合物纤维驱动器是柔性智能材料的一种创新制备方式,能提供旋 转、伸长及收缩运动,可以运用到不同的领域中,如流体筛选、机器人等方面。 在应用到流体筛选上时,不同温度的流体可使一端固定中空纤维驱动器另一端 运动至不同位置,从而将不同温度的流体运往不同区域,结合分液槽可以实现 液体温度的精确筛选。本新型热响应旋转伸缩人工肌肉的制备工艺简单,材料 廉价易得,重复性好(图3(2)),只需要准确加捻、形成螺旋、加热退火即可实 现旋转伸缩中空纤维驱动器的制备。
[0094]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的 限制。凡在本发明的精神和原则之内所作的任何修改、等同变化与修饰,均仍 属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1