一种基于双重步进法的数字抽油机智能控制方法与系统
1.本发明属于抽油机技术领域,涉及游梁式抽油机的智能控制,特别涉及一种基于双重步进法的数字抽油机智能控制系统。
背景技术:
2.有杆抽油是世界石油工业的传统采油方式之一,现有的游梁式抽油机控制系统存在以下几个问题:一是不能自动进行冲次调节,冲次的调节往往根据油井工人的经验进行认为设定,这会造成所控制的抽油机的抽油能力或高于或低于油井的产油量,无法满足实时变化的井况的要求,当抽油机的冲次过快时会造成抽油能力高于油井的产油量,损伤抽油机的同时浪费电能,如果设定的冲次过低则会降低油井的产量;二是不能有效存储历史运行数据并对数据进行分析处理并实现可视化;三是不能有效对系统故障进行精确定位。目前的有杆抽油机普遍存在着数据测量困难、智能化程度不高、能源浪费严重的问题。
技术实现要素:
3.为了克服上述现有技术的缺点,本发明的目的在于提供一种基于双重步进法的数字抽油机智能控制系统,以期达到发挥游梁式抽油机可靠性强的特点,又能实现传统游梁式抽油机所不具备的节能高效、智能控制、数字化的优点。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种基于双重步进法的数字抽油机智能控制方法,包括如下步骤:
6.步骤1,采集数字抽油机的抽油杆载荷和位移数据、抽油机电机运行电参数;
7.步骤2,根据所述抽油杆载荷和位移数据,计算出示功图面积;
8.步骤3,基于s.g.吉布思波动方程,使用抽油杆载荷和位移数据求解泵载荷和泵位移,然后根据泵载荷和泵位移求解泵功图面积;
9.步骤4,采用双重步进法获取抽油机最优冲次参数;
10.步骤5,基于得到的最优冲次参数,控制抽油机电机运行的频率转速。
11.优选地,所述步骤1中,所述抽油杆载荷和位移数据由安装在驴头上的载荷位移传感器采集,所述抽油机电机运行电参数为抽油机电机运行的电流和电压,由电参量传感器采集。
12.优选地,所述步骤2中,所述示功图面积的计算方法为:
13.以抽油杆载荷为纵坐标,位移为横坐标,绘制地面示功图,所述地面示功图是一个不规则的封闭圆形区域;
14.分别计算抽油杆载荷和位移的平均值,得到所述不规则的封闭圆形区域的中心点坐标,将地面示功图的面积分为相邻两个点和中心点连接围成的n个三角形面积之和,分别求得三角形的面积相加,得到地面示功图面积,其中n为采集的抽油杆载荷和位移数据的组数。
15.优选地,所述步骤4中,采用双重步进法获取抽油机最优冲次参数的方法如下:
16.第一重调节:根据历史存储数据,人为设定调节冲次的上下限,并设定冲次的调节级数,根据设定的上下限以及调节级数,从最低冲次开始到最高冲次逐级对冲次进行运行,得到当前井况不同冲次运行下的地面示功图以及泵功图,然后根据选定的标准是示功图还是泵功图找出面积最大值对应的冲次,完成最优冲次的粗调,从而完成第一重的冲次调节;
17.第二重调节,依据第一重调节的粗调最优冲次,选定该粗调最优冲次的前一级冲次为第二重调节的冲次调节下限,选定该粗调最优冲次的后一级冲次为第二重调节的冲次调节上限,选择第一重调节时设定的相同级数,运行第一重调节相同的步骤,找出更精细的当前最优冲次。
18.本发明还提供了一种基于双重步进法的数字抽油机智能控制系统,包括:
19.载荷位移传感器,安装于抽油杆顶部,采集抽油杆载荷和位移数据;
20.电参量传感器,嵌入在抽油机电机上,采集抽油机电机运行电参数;
21.工控机,接收所述抽油杆载荷和位移数据以及抽油机电机运行电参数;根据所述抽油杆载荷和位移数据,计算出示功图面积;基于s.g.吉布思波动方程,使用抽油杆载荷和位移数据求解泵载荷和泵位移,然后根据泵载荷和泵位移求解泵功图面积;采用双重步进法获取抽油机最优冲次参数;
22.da模块,对所述抽油机最优冲次参数进行da转换;
23.变频器,根据da转换后的抽油机最优冲次参数,控制抽油机电机运行的频率转速。
24.优选地,所述数字抽油机为游梁式抽油机。
25.优选地,所述工控机通过rtu模块接收所述抽油杆载荷和位移数据以及抽油机电机运行电参数,
26.优选地,所述工控机连接有数据管理模块,所述数据管理模块包括上位机和数据库系统,所述数据库系统用于对各项参数进行存储与管理,所述上位机用于提供人机交互界面,并进行数据库存储参数的图像化显示以及系统运行参数的查看、设定、修改和图像化处理,上位机同时提供数据库数据的导入导出功能,导入导出格式为excel格式文件。
27.优选地,所述数字抽油机智能控制系统为冗余系统,采用两套相同独立配置的硬件、软件设计,其中一套出现问题时,另一套系统能够立即启动代替工作,直到故障被排除。
28.优选地,本发明还包括报警灯,所述工控机实时读取变频器中的错误代码以及监控系统运行中出现的故障信息,并将故障代码存储入数据库系统,同时触发继电器,继电器控制报警灯报警,提示系统故障。
29.与现有技术相比,本发明的有益效果是:
30.1、采用动态冲次调节,可以保证抽油机始终工作在最优状态。
31.2、参数信息随时可更改,可扩展性强,能够轻易地实现控制系统的迁移复制。
32.4、工况监测、电机控制、故障监测集成为一个整体,节约了硬件设备成本,大大提高了游梁式抽油机的技术水平,节约能源,减轻工人劳动强度,提高智能化、自动化水平。
附图说明
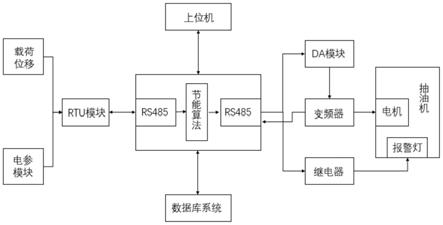
33.图1是本发明的系统总体方框图。
34.图2是本发明的硬件总体框图。
35.图3是本发明的控制系统算法流程原理框图。
36.图4是本发明的上位机主界面图。
37.图5是上位机静态参数界面图。
38.图中:1、载荷位移传感器接收模块;2、rtu模块;3、工控机;4、放置柜;5、变频器;6、抽油机电机;7、报警灯;8、继电器;9、显示器;10、da模块;11、电容模块12、菜单区;13、数据列表区;14、图形选择区;15、图形显示区;16、数据显示区;17、数据选择区;18、油田信息区;19、井号列表区;20、抽油机信息区;21、泵功图参数区;22、冲次调节区;23、状态检测区。
具体实施方式
39.下面结合附图和实施例详细说明本发明的实施方式。
40.本发明提供了一种基于双重步进法的数字抽油机智能控制系统,包括硬件部分以及智采软件。以游梁式抽油机为例,对本发明的智能控制系统进行详细说明。
41.如图1所示,本发明智能控制系统以传统游梁式抽油机为载体,系统硬件部分为整个系统运行的环境与平台,主要包括载荷位移传感器、电参量传感器、工控机、da模块以及变频器;智采软件在工控机中运行。具体地:
42.载荷位移传感器安装于抽油杆顶部,即驴头上,采集抽油杆载荷和位移数据;电参量传感器嵌入在抽油机电机上,采集抽油机电机运行电参数。工控机接收抽油杆载荷和位移数据以及抽油机电机运行电参数,智采软件采用双重步进法实现对游梁式抽油机的控制,具体地,其根据抽油杆载荷和位移数据,计算出示功图面积;基于s.g.吉布思波动方程,使用抽油杆载荷和位移数据求解泵载荷和泵位移,然后根据泵载荷和泵位移求解泵功图面积,最终采用双重步进法获取抽油机最优冲次参数。在此基础上,da模块对抽油机最优冲次参数进行da转换;变频器根据da转换后的抽油机最优冲次参数,控制抽油机电机运行的频率转速。
43.在本发明的实施例中,工控机通过rtu模块接收抽油杆载荷和位移数据以及抽油机电机运行电参数,rtu模块可采用蓝牙等信息传输技术。在工控机中集成抽油机电机运行电参数,抽油杆载荷位移参数以及系统故障信息的采集和数字化传输。
44.在本发明的实施例中,工控机连接有数据管理模块,数据管理模块包括上位机和数据库系统。上位机和数据库系统均依托于工控机运行。工控机作为系统运行的核心部件,承担着智采软件的运行,上位机的运行以及数据库系统的运行。通过rs485端口实现与rtu模块、da模块、继电器、变频器模块的通信,从而作为整个系统的数据通信的中枢核心。
45.图2是本发明的硬件总体框图,其中示出了载荷位移传感器接收模块1、rtu模块2、工控机3、放置柜4、变频器5、抽油机电机6、报警灯7、继电器8、显示器9、da模块10、电容模块11。
46.数据库系统用于对各项参数进行存储与管理,以及系统状态信息的存储与提供。示例地,其架构基础建立于sql server 2005,前述智采软件的运行数据来源均通过读取数据库系统相关参数获得,并将处理后的各项数据存储到数据库系统中,从而实现数据的精细化管理,数据库系统由以下几个子表组成:报警参数、单井静态参数、电机参数、工地井号、详细动态数据。各数据子表之间相互独立,管理整个系统的各项重要参数。其中详细动态数据子表存储有系统运行历史数据,具有七天自动清除功能,只存储七天的运行数据。
47.上位机集数据库数据读取计算分析、数据图形化显示、重要参数标识、系统运行参
数设定,数据导入导出功能于一体,其提供人机交互界面,并进行数据库存储参数的图像化显示以及系统运行参数的查看、设定、修改和图像化处理,上位机同时提供数据库数据的导入导出功能,导入导出格式为excel格式文件。示例地,系统运行的参数以及运行状态信息存储在数据库系统内,上位机通过与数据库系统的互联,实现对数据库系统数据的实时读取,并具有筛选功能,通过上位机界面的设定,能够从数据库系统获取所需的数据,并对数据进行对应的处理。在数据显示功能上可以显示诸如上冲程最大电流、下冲程最大电流、电流平衡度、光杆功率、最大载荷、最小载荷等关键数值,同时,能够绘出选定时刻的地面功图、泵功图、一个冲程内的电流曲线、电机功率曲线等。在系统运行参数设定上,上位机通过对数据库系统静态参数表的更改冲次调节级数,冲次确定方式等关键参数的设定,从而影响设定系统的运行状态。在数据的导入导出功能上,上位机软件能够将数据库各个子表的数据导出为excel格式数据,以供后续分析需要,同时能够将excel格式的数据导入到各个子表。
48.由此,本发明智能控制系统是将工况实时监测、抽油机冲次控制调节、系统故障自动定位集成为一体,利用一套集成的系统同时实现上述的三种功能。控制系统与游梁式抽油机的结合通过两个部分,一个是抽油机运行的动力源电机即抽油机电机以及电参量传感器,另一个是安装在驴头上的载荷位移传感器。电机既是一个动力源,控制抽油机的冲次,又是一个信号源,通过电参量传感器获得电机运行的电流电机功率等运行参数,载荷位移传感器在一个冲次运行周期内等间距取样n组载荷位移参数,通过蓝牙信息传输技术将采集到的参数传输给rtu模块,从而实现游梁式抽油机与智能控制系统的连接。
49.本发明的系统故障通过如下结构检出:
50.工控机实时读取变频器中的错误代码以及监控系统运行中出现的故障信息,并将故障代码存储入数据库系统,以便查看,同时触发继电器,继电器控制报警灯报警,提示系统故障。本发明的故障类型分为四大类,包括串口故障、变频器故障、继电器故障、rtu故障,本发明能够准确定位具体的故障类型并报警,具体地,通过读取到的故障代码与数据库系统故障编码信息的对比,能够快速对故障进行定位,从而提高系统故障定位以及修复的效率。
51.本发明智能控制系统为为冗余系统,采用两套相同独立配置的硬件、软件设计,当一套出现故障时,会自动切换至备用冗余系统即另一套系统,另一套系统能够立即启动代替工作,直到故障被排除,系统重新恢复变频冲次自动调节状态。
52.本发明智能控制系统采用超级电容供电系统进行供电,具体是将超级电容置入电路系统,利用电容的充放电特性,能够对电能进行有效的存储和利用,从而提高系统的供电效率,节约电能。经过测试,与直接使用交流电进行供电的方式相比,能够节省15%的电能消耗。
53.由此,参考图3,本发明一种基于双重步进法的数字抽油机智能控制方法,包括如下步骤:
54.步骤1,利用载荷位移传感器采集数字抽油机的抽油杆载荷和位移数据,利用电参量传感器采集采集抽油机电机运行电参数。
55.步骤2,根据抽油杆载荷和位移数据,计算出示功图面积。
56.步骤3,基于s.g.吉布思波动方程,使用抽油杆载荷和位移数据求解泵载荷和泵位
移,然后根据泵载荷和泵位移求解泵功图面积。
57.步骤4,采用双重步进法获取抽油机最优冲次参数。
58.步骤5,基于得到的最优冲次参数,控制抽油机电机运行的频率转速。
59.对上述控制方法详细介绍如下:
60.计算所需的基础参数主要来至于两个方面:有杆抽油系统的各种静态参数和抽油机运行时的动态参数。静态参数在每口井中都是固定的,包括油杆内径、油管外径、油管壁厚、油杆长度、油杆密度、井液密度等参数,主要靠人工输入;动态参数是实时数据,包括载荷和位移数据,以及电压和电流数据,主要靠传感器测量得来。抽油机运行时总是周期性的做着冲次运动。测量所有的数据至少需要两个周期,从开始测量起,角位移传感器通过寻找两次最高点或者最低点来判断一个抽油机的运行周期,达到测量抽油机冲次的目的,为下一个周期的测量过程做准备。在第二个抽油机的周期内,rtu通过传感器,实时测量抽油机各状态n个采样点的数据。通过角位移传感测量抽油机游梁的倾角,进而计算此刻抽油机的位移;通过在载荷传感器测量抽油机杆顶端悬点的载荷,通过电流和电压传感器测量抽油机运行时电流和电压。在进行最基本的测量之后,结合静态参数进行各种计算。依据测量得到的n组位移和载荷参数,以位移为横坐标,载荷为纵坐标,每一组数据为一个点绘制抽油机的地面示功图。在一个周期内,n个点绘制成的地面示功图是一个不规则的封闭圆形区域,分别计算载荷和位移的平均值得到不规则圆形的中心点坐标,整个图形的面积可以分为相邻两个点和中心点连接围成的n个三角形面积之和,分别求得三角形的面积相加求得地面示功图面积。然后运用s.g.吉布斯波动方程求解抽油机泵的泵载荷和泵位移,地面示功图和泵功图数据除了可以判断抽油机的运行状态,同时可以判断是否有典型故障发生。地面示功图的面积反映了悬点的做功情况,它可以用来计算抽油机杆消耗的功率,进而计算抽油机系统效率。同样泵功图的面积可以反映抽油机泵的做功情况,提供对抽油机进行冲次自动调节的依据。利用当前系统的电流和电压,计算当前电机的功率。本实施例中,n可取200。
61.关于运用s.g.吉布斯波动方程求解泵功图面积,本发明采用了专利cn1916413a的具体方法,在此不再赘述。
62.在计算出泵功图以及示功图的基础上,采用双重步进法对抽油机系统最优冲次进行二次探寻,自动探寻系统最优冲次,实现对系统抽油机冲次的自动调节,判定抽油机最优冲次的标准可以根据实际情况实现从泵功图最大化与示功图最大化的自由切换,调节周期可以根据油井实际情况进行自由设定。
63.双重步进法的其工作原理是:根据历史存储数据,人为通过上位机设定调节冲次的上下限,并设定冲次的调节级数,系统根据设定的上下限以及调节的级数,从最低冲次开始到最高冲次逐级对冲次进行运行,得到在当前井况下不同冲次运行下的地面示功图以及泵功图,然后根据选定的标准是示功图还是泵功图找出面积最大值对应的冲次,完成最优冲次的粗调,从而完成第一重的冲次调节。接着进入第二重的调节,依据第一重调节的粗调最优冲次,选定该粗调最优冲次的前一级冲次为第二重调节的冲次调节下限,选定该粗调最优冲次的后一级冲次为第二重调节的冲次调节上限,选择第一重调节时设定的相同级数,运行第一重调节相同的步骤,找出更精细的当前最优冲次。该调节过程的调节周期同样可以在上位机中进行人为的设定,从而可以适应不同变化情况的井况,不同的级数设定,也
可以实现冲次调节的精细化要求。假设通过上位机设定的冲次调节的上限为70hz,冲次调节的下限为50hz,设定调节的级数为5,控制系统进入第一重调节程序,分别探寻冲次为50hz、55hz、60hz、65hz、70hz共五个冲次情况下示功图和泵功图的面积大小,假设选择的标准为示功图面积,系统将根据五个冲次情况下示功图面积的大小选择示功图面积最大的冲次为第一重冲次调节寻找到的最优冲次,假设为60hz时示功图面积最大,则60hz为第一重冲次调节的最有冲次,此时系统进入第二重冲次调节程序,系统自动将60hz的前一级冲次设为第二重调节的冲次下限为55hz,将60hz的后一级冲次设为第二重调节的冲次上限为65hz,将55hz至65hz同样分为5级,执行第一重调节相同的探寻过程,同样找到以示功图面积为判断标准下最佳的冲次也即示功图面积最大的冲次,并与第一重调节得到的最优冲次进行对比判断,从而得到最终的最优冲次。当潘顿标准为泵功图面积时方法类似,只是将判断标准做一个更改。双重步进法能够同时兼顾冲次调节精度要求不高与精度要求高的场合,在精度要求高时,只需要将冲次调节的级数增加,从而能够得到更高精度的冲次调节结果,在精度要求不高时,则将冲次调节的级数减少,从而得到一个精度不那么高的冲次调节结果,从而能够适应井况的变化。更具灵活性,而双重步进法的更进一步意义在于,其能够通过第二重的调节减少仅仅一重调节错过最佳冲次点的概率,能够将调节的准确度提升一半以上。
64.由此,本发明实现了游梁式抽油机冲次的控制,以适应变化的工况,同时对故障参数进行实时监测更新并通过继电器控制报警灯实现实时报警。保障系统的正常运行与故障的监测报警。
65.在本发明的一个实施例中,控制方法的步骤如下:
66.步骤1,通过载荷位移传感器实现对200组载荷和位移数据的采集,通过电参量传感器实现对200组电流和电压数据的采集。
67.步骤2,通过采集到的200组电流电压参数数据,实现对电机功率的求解。
68.步骤3,通过采集到的200组载荷位移参数,以位移为横坐标,载荷为纵坐标,得到200个点,绘制地面示功图。
69.步骤4,求解地面示功图的面积。
70.具体的,由于在一个周期内,200个点绘制成的地面示功图是一个不规则的封闭圆形区域,分别计算载荷和位移的平均值得到不规则圆形的中心点坐标,整个图形的面积可以分为相邻两个点和中心点连接围成的200个三角形面积之和,分别求得三角形的面积相加求得地面示功图面积。
71.步骤5,利用专利cn1916413a的算法即s.g.吉布思波动方程求解泵功图算法对泵功图面积进行求解。
72.步骤6,通过双重步进法进行最优冲次的探寻与设置,并通过变频器对电机进行控制,从而改变抽油机冲次变频器输出控制信号与电机冲次成正相关。
73.图4实施例是上位机主界面图,上位机主界面包括菜单区12、数据列表区13、图形选择区14、图形显示区15、数据显示区16、数据选择区17
74.菜单区12-包括数据库、系统、帮助及其下属各级菜单;
75.数据列表区13-数据库中各项数据列表,按时间顺序排列,选中项即对应当前图形选择区14、图形显示区15、数据显示区16所对应的数据;
76.图形选择区13-选择基于当前数据项的不同类型曲线,包括地面功图、泵功图、电机电流、电机功率;
77.图形显示区15-显示所选择的曲线图形;
78.数据显示区16-对应当前曲线图形的其它重要统计数据;
79.数据选择区17-数据列表刷新,以及按照时间范围进行数据列表检索
80.图5实施例是上位机静态参数设置界面图,可以进行系统运行静态参数的查看以及设置,由油田信息区18、井号列表区19、抽油机信息区20、泵功图参数区21、冲次调节区22、状态检测区23六部分构成,参数包括冲次立刻调节、冲次调节级数、级数间隔周期、冲次调节周期、冲次确定方式、当前最优冲次、给定冲次下限、给定冲次上限、当前最优冲次,给定冲次报警、阻尼系数计算方式、状态立刻监测等。静态参数作为抽油机智能控制系统的重要运行参数来源,在使用过程中可实现实时的配置,从而实现对系统的控制,其中冲次调节区22参数意义以及实施过程如下:
81.冲次确定方式(设置为1或2或3)-1为手动冲次设置方式,2为地面功图自动冲次调节方式,3为泵工图自动冲次调节方式;
82.手动冲次设置方式(冲次确定方式为1有效)
83.手动给定冲次-手动冲次设置方式下,给定的输出频率,单位为hz;
84.自动冲次调节方式(冲次确定方式为2、3有效);
85.冲次立刻调节-1为立刻启动1次冲次调节,0为关闭冲次调节;
86.冲次调节周期-自动启动冲次调节的间隔时间,单位为天;
87.给定冲次下限-自动冲次调节过程中,试算的最低输出频率,单位为hz;
88.给定冲次上限-自动冲次调节过程中,试算的最高输出频率,单位为hz;
89.冲次调节级数-试算过程中,在上下限之间选定的输出频率总级数;
90.级数间隔周期-试算过程中,相邻两级数之间的间隔时间,单位为分钟,此周期设置为rtu数据采集周期的整数倍;
91.当前最优冲次-自动冲次调节完成后,选定的最新最优输出频率,单位为hz;
92.给定冲次报警
93.给定冲次报警-变频器报警状态下的固定输出频率,单位为hz。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1