一种顶驱吊环防撞猴台控制装置的制作方法
1.本实用新型涉及石油钻井工程安全控制技术,尤其是涉及一种石油钻机顶驱吊环防撞猴台的安全防护控制(及报警)装置。
背景技术:
2.随着石油钻井技术的不断发展,顶驱在国内外钻井中的应用越来越广泛,其机械吊臂和旋转头的特有作用,完成上扣卸扣、取放立根、接立根等作业。然而,由于司钻操作的顶驱吊环是在距离自己二十多米高的二层台使吊卡临近猴台作业,这无疑增加了顶驱吊环碰撞猴台的风险,若司钻观察不清或是误操作,使前倾的吊环未归中位而使游车下行,吊环吊卡就会下压猴台发生碰撞,导致安全事故。
3.为此,我们前期提出了多种石油钻机顶驱防撞猴台控制装置,有的侧重以获取顶驱的前倾与悬浮信号来防止吊环碰撞猴台,有的通过计算吊环前倾时间来换算前倾角度来防止吊环碰撞猴台,还有的侧重在吊环碰撞猴台的瞬间刹住游车。但在实际使用中,这些方法都存在着局限性,仍然难以从根本上杜绝顶驱吊环碰撞猴台事故发生。因此有必要对现有石油钻机顶驱猴台防撞控制装置进行进一步的完善和改进,以从根本上杜绝由此产生的安全事故发生。
技术实现要素:
4.本实用新型针对现有技术不足,提出一种顶驱吊环防撞猴台控制装置,预防顶驱吊环碰撞猴台的应激信号检测机构采用由若干个干簧管串联或并联组成磁控传感器,并在顶驱吊环的吊卡上与所述磁控传感器配合安装磁铁;可提前监测顶驱吊环防撞猴台风险,并及时采取防护措施,安全性能更高。
5.本实用新型采用的技术方案:
6.一种顶驱吊环防撞猴台控制装置,包括信号采集单元、控制单元以及防护执行机构;所述信号采集单元包括绞车传感器以及预防顶驱吊环碰撞猴台的应激信号检测机构,所述的应激信号检测机构采用若干个干簧管串联或并联组成磁控传感器,并在顶驱吊环的吊卡上与所述磁控传感器配合安装对应的磁铁;所述绞车传感器及磁控传感器的输出信号分别接入所述控制单元;所述控制单元输出控制信号连接防护执行机构。
7.所述预防顶驱吊环碰撞猴台的应激信号检测机构采用两组磁控传感器,分别设置于猴台护栏上沿和猴台底座下沿,磁铁采用整条或单体磁体组合成条状结构设置在吊卡5上易与猴台碰撞的前端。
8.所述的顶驱吊环防撞猴台控制装置,所述磁控传感器由若干个常闭干簧管10串联而成,将组成的串联电路软装保护后,封装于不导磁材料管12内,串联电路的输出线从不导磁材料管12的一端引出,然后将不导磁材料管固定在猴台护栏上边1上或猴台底座下边2上。
9.所述的顶驱吊环防撞猴台控制装置,所述磁控传感器由若干个常开干簧管11并联
而成,将组成的并联电路软装保护后,封装于不导磁材料管12内,并联电路的输出线从不导磁材料管12的一端引出,然后将不导磁材料管固定在猴台护栏上边1上或猴台底座下边2上。
10.所述的顶驱吊环防撞猴台控制装置,防护执行机构包括控制电磁阀以及梭阀,所述控制电磁阀和梭阀联锁到绞车滚筒和总离合高低速控制气路之中,构成盘刹连锁装置;控制电磁阀和梭阀气源进口分别连接气源,所述控制电磁阀受控连接于所述控制单元,所述控制电磁阀的输出口a连接控制总离合与高低速,控制电磁阀的输出口b连接梭阀的控制输入端,所述梭阀的输出连接控制盘刹。
11.所述控制单元采用可编程控制器、单片机+pc或工业控制计算机,与所述控制单元连接有报警单元。
12.实用新型有益效果:
13.1、本实用新型石油钻机顶驱吊环防撞猴台控制装置,预防顶驱吊环碰撞猴台的应激信号检测机构采用由若干个干簧管串联或并联组成磁控传感器,并在顶驱吊环的吊卡上与所述磁控传感器配合安装对应的磁铁;顶驱吊环临近猴台时,在吊卡与猴台即将发生碰撞时,磁控传感器发送信号至控制单元,控制单元通过防护执行机构自动控制盘刹刹车系统来锁定游车,可提前监测顶驱吊环防撞猴台风险,并及时采取防护措施,安全性能更高。
14.2、本实用新型石油钻机顶驱吊环防撞猴台控制装置,以若干常闭或常开干簧管串联或并联组成的磁控传感器,可以全方位的感知顶驱吊环是否临近了猴台,避免了防护盲点,适合国内外各种型号的钻机,技术难度不大,性价比较高。经济适用,且安全可靠。
15.3、本实用新型石油钻机顶驱吊环防撞猴台控制装置,利用绞车传感器监测游车上/下行进高度,只有游车带着顶驱吊环进入猴台防护区域时,防护执行机构才会联锁刹车,避免了顶驱吊环正常作业时游车被强制锁定。全系统设计合理,容易实现,方便推广,具有较好的社会效益。
附图说明
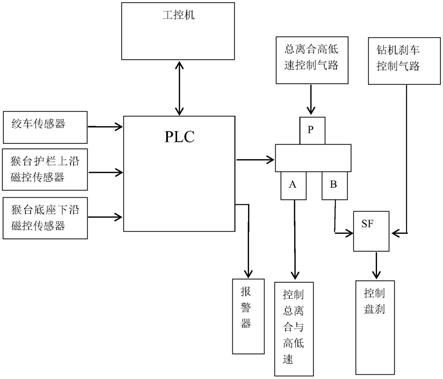
16.图1:本实用新型钻机顶驱吊环防撞猴台控制装置原理方框图;
17.图2:本实用新型钻机顶驱吊环防撞猴台控制装置结构及应用示意图;
18.图3:本实用新型顶驱吊环防撞猴台控制装置磁控传感器结构之一;
19.图4:本实用新型顶驱吊环防撞猴台控制装置磁控传感器结构之二。
具体实施方式
20.下面通过具体实施方式,结合附图(控制单元以采用plc为例)对本实用新型技术方案做进一步的详细描述。
21.实施例1
22.参见图1,本实用新型顶驱吊环防撞猴台控制装置,包括信号采集单元、控制单元以及防护执行机构;所述信号采集单元包括绞车传感器以及预防顶驱吊环碰撞猴台的应激信号检测机构,所述的应激信号检测机构采用若干个干簧管串联或并联组成磁控传感器,并在顶驱吊环的吊卡上与所述磁控传感器配合安装对应的磁铁;所述绞车传感器及磁控传感器的输出信号分别接入所述控制单元;所述控制单元输出控制信号连接防护执行机构。
23.本实用新型顶驱吊环防撞猴台控制装置,利用磁场信号可控制干簧管触点通断的特性,用若干个干簧管串联或并联组成磁控传感器,再由磁控传感器、绞车传感器构成信号采集单元,所述控制单元可采用可编程控制器(plc)、单片机+pc或工业控制计算机,并与所述控制单元连接有报警单元。防护执行机构与绞车刹车系统联锁。控制单元依据设定的程序判断顶驱吊环是否进入了防护区域,当顶驱吊环进入了防护区域且安装有磁铁的吊卡临近猴台时,安装在猴台上的磁控传感器会感应到磁场信号并输出开关信号给控制单元,控制单元发出刹车指令给执行单元(防护执行机构)使其锁定游车。
24.实施例2
25.参见图2,本实施例的顶驱吊环防撞猴台控制装置,和实施例1的不同之处在于:进一步的,所述预防顶驱吊环碰撞猴台的应激信号检测机构采用两组磁控传感器,分别设置于猴台护栏上沿和猴台底座下沿,磁铁采用整条或单体磁体组合成条状结构设置在吊卡5上易与猴台碰撞的前端。
26.图中3为猴台护栏上沿磁控传感器,图中4为猴台底座下沿磁控传感器。
27.实施例3
28.参见图3,本实施例的顶驱吊环防撞猴台控制装置,和实施例1或实施例2不同的是,所述磁控传感器由若干个常闭干簧管10串联而成,将组成的串联电路软装保护后,封装于不导磁材料管12内,串联电路的输出线从不导磁材料管12的一端引出,然后将不导磁材料管固定在猴台护栏上边1上或猴台底座下边2上。
29.实施例4
30.参见图4,本实施例的顶驱吊环防撞猴台控制装置,和实施例1或实施例2不同的是,所述磁控传感器由若干个常开干簧管11并联而成,将组成的并联电路软装保护后,封装于不导磁材料管12内,并联电路的输出线从不导磁材料管12的一端引出,然后将不导磁材料管固定在猴台护栏上边1上或猴台底座下边2上。
31.参见图1
‑
图3,本实用新型顶驱吊环防撞猴台控制装置,磁控传感器的磁控电路可由若干个常闭干簧管10串联而成,将组成的串联电路软装保护后,封装于不导磁材料管12内,串联电路的输出线从不导磁材料管12的一端引出,然后将不导磁材料管12固定在猴台护栏上边1上,或是将不导磁材料管12固定在猴台底座下边2上,再将串联电路的引线接入控制单元(plc控制器8)的输入端。当安装有磁铁(磁片或磁条)的吊卡5临近猴台时,串联电路中任意一个常闭干簧管10会在磁场磁力作用下断开导致串联电路断路,从而给plc控制器8输出开关信号。
32.参见图1、图2、图4,本实用新型顶驱吊环防撞猴台控制装置,磁控传感器的磁控电路,可由若干个常开干簧管11并联而成,将组成的并联电路软装保护后,封装于不导磁材料管12内,并联电路的输出线从不导磁材料管12的一端引出,然后将不导磁材料管12固定在猴台护栏上边1上,或是将不导磁材料管12固定在猴台底座下边2上,再将并联电路的引线接入plc控制器8的输入端。当安装有磁铁的吊卡临近猴台时,并联电路中任意一个常开干簧管11在磁场磁力作用下接通,都会使并联电路得电从而给plc控制器8输出开关信号。
33.所述防护执行机构包括控制电磁阀以及梭阀,所述控制电磁阀和梭阀联锁到绞车滚筒和总离合高低速控制气路之中,构成盘刹连锁装置;控制电磁阀和梭阀气源进口分别连接气源,所述控制电磁阀的控制线圈连接plc控制单元的输出端,所述控制电磁阀的输出
口a连接控制总离合与高低速,控制电磁阀的输出口b连接梭阀的控制输入端,所述梭阀的输出连接控制盘刹。
34.实施例5
35.参见图1、图2,本实施例的顶驱吊环防撞猴台控制装置,在猴台护栏的上边1铺设一路磁控传感器(上沿磁控传感器3),在猴台底座的下边2铺设一路磁控传感器(猴台底座下沿磁控传感器4),在吊卡5的前端安装磁铁,所述磁控传感器的输出信号接入plc控制器8的信号采集端口,当吊卡5临近猴台护栏的上边1或猴台底座的下边2时,上沿磁控传感器3或下沿磁控传感器4就会感受到吊卡5前端安装的磁铁(上部磁铁6和下部磁铁7)的磁场,在磁力的作用下磁控传感器的磁控电路会断开或是接通,此时plc控制器8会接受到上沿磁控传感器3或下沿磁控传感器4发出的开关信号,并根据设定的程序输出刹车信号给防护执行机构9,最终通过与绞车刹车系统联锁的防护执行机构9实现对游车的锁定,防止吊卡下压猴台或是上挂猴台。
36.在绞车导气龙头上安装绞车传感器,将其输出信号接入plc控制器8的信号采集端口,当且仅当游车带着顶驱吊环提升或下降至系统设定的猴台防护区域时,与绞车刹车系统的联锁的防护执行机构9才会执行plc控制器8发出的控制命令。
37.本实用新型采用绞车传感器实时检测游车大钩的高度位置信号,并传输给控制单元的数字信号输入端;通过在猴台护栏上沿和猴台底座下沿铺设的磁控传感器,实现控制单元数字信号输入端对顶驱吊环临近猴台时产生的磁场信号的采集;系统运行时,控制单元依据设定的程序自动分析判断顶驱吊环是否进入了防撞区域,当顶驱吊环进入了防撞区域且吊卡临近猴台时,则防撞控制系统发出控制信号给防护执行机构,防护执行机构中的控制电磁阀以及梭阀与绞车滚筒和总离合高低速控制气路联锁,及时锁定游车,可提前监测顶驱吊环碰撞猴台的风险,并及时采取防护措施,确保石油钻井生产安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1