一种用于太阳翼展开或收缩的伸缩缸的制作方法
[0001]
本实用新型属于伸缩机构领域,具体涉及一种用于太阳翼展开或收缩的伸缩缸。
背景技术:
[0002]
在航天器部件的地面测试试验中,往往要求机械部件的工作状态和太空中相一致,否则测试试验就失去了意义。在太空中无重力的环境下,活塞杆做悬浮状态的轴向运动,而实际情况活塞杆和缸筒在圆周表面会产生接触。但由于重力的存在,地面环境中,伸缩杆和杆套在圆周表面会产生接触。
[0003]
伸缩缸(伸缩杆、伸缩机构)作为控制太阳翼展开和收缩的装置,是太阳翼驱动组件中的重要结构。如何在地面模拟伸缩缸的无重力测试环境是亟待解决的问题。
[0004]
悬浮技术是一种保持物体间非接触状态的方式,然而尚未见悬浮技术在伸缩机构中的应用;且作为悬浮技术一种手段的磁悬浮技术,需要在伸缩缸内布置电磁铁和永磁体等组件,这大大增加了伸缩缸的重量,无论在安装和测试过程中均是不利的,且重量的增加也影响发射成本,这也影响磁悬浮相关技术在太空环境及地面测试中的应用。
技术实现要素:
[0005]
本实用新型的目的在于克服现有技术的不足,提供一种用于太阳翼展开或收缩的伸缩缸,能够在地面测试中模拟活塞杆在缸筒内的无阻力悬浮伸缩运动。
[0006]
本实用新型的实施例公开了一种用于太阳翼展开或收缩的伸缩缸,其包括伸缩缸缸体和活塞杆,伸缩缸缸体内设有工作腔,活塞杆的活塞端位于工作腔内;所述的工作腔呈圆柱形,工作腔一端封闭,另一端设有缩径段,缩径段连通伸缩缸缸体外部;
[0007]
工作腔内侧壁面上沿圆周方向均匀设有多组位移传感器组和内壁气孔组;每组位移传感器组包括多个沿轴向分布的位移传感器,每组内壁气孔组包括多个沿轴向分布的内壁气孔;
[0008]
所述的工作腔密封的一端设有轴向位移传感器和尾部气孔;缩径段与工作腔连接处的台阶面设有颈部气孔;尾部气孔和颈部气孔均朝向活塞杆的活塞端;
[0009]
所述的缩径段内设有定位环槽口;所述的定位环槽口内设有定位环。
[0010]
优选的,所述的位移传感器组和内壁气孔组均有三组,以120
°
圆周分布在工作腔内侧壁面上。
[0011]
优选的,所述的活塞杆的活塞厚度大于相邻两个位移传感器之间的距离,且大于相邻两个内壁气孔之间的距离。
[0012]
优选的,所述的尾部气孔有多个,呈圆周排列均匀分布在工作腔密封的一端。所述的颈部气孔有多个,呈圆周排列均匀分布在缩径段与工作腔连接处的台阶面上。
[0013]
优选的,所述的定位环通过推杆电机驱动实现在定位环槽口内的径向移动。
[0014]
与现有技术相比,本实用新型是一种基于气浮技术的无阻力悬浮伸缩缸,利用气浮技术保持活塞杆在缸筒内始终处于悬浮状态,避免两者因接触产生力和形变,同时利用
喷气技术驱动活塞杆的伸缩运动。与传统技术相比,气浮技术不会给结构带来太多的质量改变,可在地面测试完成后直接应用于太空环境;同时气浮技术可控性高,执行更加稳定,没有任何装置接触,且无污染。
附图说明
[0015]
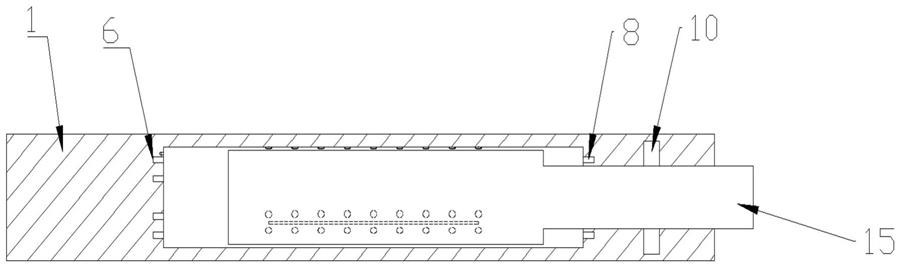
图1为本实用新型伸缩缸剖面示意图;
[0016]
图2为缸体的剖面示意图;
[0017]
图3为伸缩缸外部结构示意图;
[0018]
图4为图2的a-a剖面图;
[0019]
图5为图2的b-b剖面图;
[0020]
图6为定位环解锁状态示意图;
[0021]
图7为定位环锁定状态示意图。
具体实施方式
[0022]
下面结合说明书附图和实施例对本实用新型做进一步的说明。
[0023]
如图1-3所示,本实施例公开了一种用于太阳翼展开或收缩的伸缩缸,其包括伸缩缸缸体1和活塞杆15,伸缩缸缸体内设有工作腔2,活塞杆15的活塞端位于工作腔2内;所述的工作腔2呈圆柱形,工作腔2一端封闭,另一端设有缩径段,缩径段连通伸缩缸缸体1外部;
[0024]
工作腔2内侧壁面上沿圆周方向均匀设有多组位移传感器组和内壁气孔组;每组位移传感器组包括多个沿轴向分布的位移传感器,每组内壁气孔组包括多个沿轴向分布的内壁气孔;
[0025]
所述的工作腔2密封的一端设有轴向位移传感器5和尾部气孔6;缩径段与工作腔2连接处的台阶面设有颈部气孔8;尾部气孔6和颈部气孔8均朝向活塞杆15的活塞端;所述的缩径段内设有定位环槽口10;所述的定位环槽口10内设有定位环11。
[0026]
优选的,所述的位移传感器组和内壁气孔组均有三组,以120
°
圆周分布在工作腔2内侧壁面上。
[0027]
优选的,所述的活塞杆的活塞厚度大于相连两个位移传感器之间的距离,且大于相连两个内壁气孔之间的距离;优选的,活塞厚度大于两倍的相邻两个位移传感器之间的距离,且大于两倍的相邻两个内壁气孔之间的距离。保证在活塞杆移动过程中,能实时检测活塞杆的径向位移并实现气浮。
[0028]
位移传感器组和内壁气孔在工作腔内轴向的分布应尽量覆盖整个工作腔,以保证活塞杆始终处于气浮状态。
[0029]
如图4所示,所述的尾部气孔有多个,呈圆周排列均匀分布在工作腔2密封的一端。
[0030]
如图5所示,所述的颈部气孔有多个,呈圆周排列均匀分布在缩径段与工作腔2连接处的台阶面上。
[0031]
内壁气孔、尾部气孔、颈部气孔均由外部的供气设备(如高压气泵)供气,气体可以是空气。伸缩缸缸体上可设置排气孔或排气阀,以排除缸体内积蓄的气体;排气孔或排气阀沿轴向均匀安装在伸缩缸缸体壁面上;排气孔或排气阀可外接排气管路,便于废气的集中排放。
[0032]
如图6和7所示,在一个具体实施例中,为了实现伸缩状态的锁定,所述的定位环槽口内均匀设置有若干个定位环,每个定位环可在定位环槽口内做径向移动。定位环通过推杆电机驱动实现在定位环槽口内的径向移动。所述的定位环通过推杆电机驱动实现在卡槽内的径向移动。所述的定位环11通过推杆电机驱动实现在定位环槽口10内的径向移动。
[0033]
在一般情况下,活塞杆15在缸筒2内做轴向伸缩运动时非竖直状态下,由于受到重力的作用,活塞杆15和缸筒2无法始终保持同心状态。在本实用新型中,当产生偏移趋势时,缸筒2内壁上的径向位移传感器3测得活塞杆15发生径向位移,此时调整内壁气孔4喷出气体的强弱,一个传感器对应一组气孔,通过气体对活塞杆15的作用力,使得活塞杆15重新回到和缸筒2的同心状态,以此保持悬浮。
[0034]
轴向位移传感器5测得活塞杆15在缸筒2内的轴向位置并控制尾部气孔6和颈部气孔8,使得活塞杆15在缸筒2内进行轴向伸缩。比如要使活塞杆15伸出,开启尾部气孔6。
[0035]
当活塞杆尚未到预设工作位置时,定位环11在定位环槽口10内,不与活塞杆15接触,当轴向位移传感器5测得活塞杆15到达预设位置时,定位环11径向向内锁住活塞杆15;解锁时,定位环11松开活塞杆15,收回定位环槽口10内。
[0036]
本实用新型的伸缩缸的一种固定方式可以是缸体底部铰接在航天器(如卫星)或航天器模型上,活塞杆的端部铰接在太阳翼上;太阳翼与卫星之间为铰接关系。活塞缸可以布置多个,同步运动以提供充足的展开或收缩动力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1