用于机动车传动系的离合器组件以及机动车传动系的制作方法
[0001]
本发明涉及一种用于机动车传动系的离合器组件,该离合器组件包括棘爪承载件和棘爪配合元件,所述棘爪承载件能够与能围绕旋转轴线旋转的第一耦联元件以不能相对转动的方式耦联,多个棘爪能枢转地固定在棘爪承载件上,所述棘爪配合元件能够与能围绕旋转轴线旋转的第二耦联元件以不能相对转动的方式耦联,在耦联状态中,每个所述棘爪沿周向形锁合地接合到设置在棘爪配合元件上的耦联凹部中,从而棘爪承载件和棘爪配合元件至少在一个旋转方向上以不能相对转动的方式耦联,并且在解耦状态中,棘爪定位在耦联凹部之外,从而棘爪配合元件和棘爪承载件彼此在旋转上解耦。
[0002]
本发明还涉及一种包括这种离合器组件的机动车传动系。
背景技术:
[0003]
从现有技术中已知这种离合器组件和装备有所述离合器组件的机动车传动系。
[0004]
在机动车传动系领域中,耦联元件通常是轴。因此,在解耦状态中,不仅棘爪配合元件和棘爪承载件彼此在旋转上解耦,而且第一和第二耦联元件、即第一和第二轴也彼此在旋转上解耦。耦联状态与此类似。
[0005]
功能原理基于棘爪的离合器组件可构造为可切换的离合器。在这种离合器中,重要的是快速且可靠地达到期望的切换状态、即耦联状态和解耦状态。只有这样离合器组件才能功能可靠地运行。此外,例如为了避免牵引力中断,尤其是在机动车领域中需要快速的切换过程。
技术实现要素:
[0006]
在此背景下,本发明的任务是给出一种离合器组件,该离合器组件在上述方面得到改进。尤其是离合器组件应能实现快速且可靠的切换过程。
[0007]
所述任务通过如下方式解决:每个所述棘爪借助相应配设的弹簧被加载到第一棘爪位置中,并且每个所述棘爪能够借助相应配设的、支承在棘爪承载件上的操作挺杆克服相应配设的弹簧的加载而被加载到第二棘爪位置中,所述操作挺杆通过滑动件支承在棘爪承载件上并沿旋转轴线方向与滑动件刚性连接。就此而言,术语“弹簧”应被广义地理解。“弹簧”意味着可因弹性变形而加载棘爪的任何结构元件。因此,当棘爪未被相应配设的操作挺杆加载时,借助相应配设的弹簧实现第一棘爪位置。在反过来的情况下,即,如果棘爪被相应配设的操作挺杆加载,则操作挺杆负责使棘爪分别占据第二棘爪位置。因此,不仅各个棘爪总是处于所限定的位置中,而且整个离合器组件也总是处于所限定的状态、即耦联状态或解耦状态。由此,确保了离合器组件的功能可靠的运行。此外,由于弹簧载荷,第一棘爪位置被相对快速地占据。相同情况适用于第二棘爪位置的占据,其中,棘爪根据通过操作挺杆实现的操作速度运动到该位置中。因此,切换过程可相对快速地进行。
[0008]
滑动件可设计成环形的并且在周向上包围棘爪承载件。因此,棘爪可通过滑动件的运动从第一棘爪位置转移到第二棘爪位置中,并且反之亦然。优选地,滑动件在此与棘爪
承载件一起围绕旋转轴线旋转。换句话说,滑动件不能相对于棘爪承载件旋转。滑动件的这种相对简单的操作运动一方面使得棘爪可快速地从第一棘爪位置转移到第二棘爪位置中,并且反之亦然。此外,滑动件还使得所有棘爪基本上同时被操作。由此,对于离合器组件可实现快速且可靠的切换过程。
[0009]
通过操作挺杆在滑动件上的刚性连接也确保了离合器组件的快速且可靠的切换过程。滑动件的运动在此直接传递到操作挺杆上。因此,能够通过滑动件精确且快速地控制操作挺杆。由此,也可精确且快速地控制棘爪的位置。另外,以此方式滑动件的构造以及操作挺杆与滑动件的连接是简单的,尤其是因为所需要的构件数量少。由此,实现离合器组件的简单安装。另外,由此能够提供具有低重量的离合器组件。
[0010]
根据一种实施方式,在解耦状态中,棘爪占据第一棘爪位置,并且在耦联状态中,棘爪占据第二棘爪位置。因此,该实施方式是所谓的常开离合器。这意味着离合器组件在未操作的状态中处于解耦状态。
[0011]
当然,离合器组件也可实施成所谓的常闭离合器。则第一棘爪位置与离合器组件的耦联状态相配设,并且第二棘爪位置与解耦状态相配设。这种离合器组件在未操作的状态中是闭合的。
[0012]
必须根据使用离合器组件的应用情况来决定离合器组件是实施为常开离合器还是常闭离合器。
[0013]
优选地,滑动件仅能沿旋转轴线相对于棘爪承载件移动。因此,操作挺杆可通过滑动件在相应于旋转轴线的运动方向上朝向相应配设的棘爪运动或远离相应配设的棘爪。滑动件相对于棘爪承载件的所有其它相对运动均被阻止。尤其是,滑动件不能相对于棘爪承载件旋转。因此,离合器组件的构造是简单的。此外,由此能将高的功能可靠性与操作挺杆的精确且快速的控制相结合。由此,对于离合器组件能实现特别快速且可靠的切换过程。
[0014]
在一种变型方案中,滑动件能够沿旋转轴线在棘爪承载件上卡锁在预限定的位置中。换句话说,滑动件可具有卡锁功能。在此,卡锁功能可基于磁的作用原理。则在断电状态中通过磁阻力将滑动件保持在预限定的位置中。替代地,卡锁功能可机械地实现、如通过球形锁止实现。在滑动件可在棘爪承载件上占据两个预限定的位置的情况下,离合器组件因此可设计为双稳态离合器。
[0015]
替代地或附加地,操作挺杆分别在没有中间元件的情况下与滑动件连接。换句话说,操作挺杆直接固定在滑动件上。由此,由操作挺杆和滑动件形成的组件仅包括少量构件。产生已经关于刚性连接提到的效果和优点。
[0016]
滑动件能够与致动器连接为,使得滑动件能够沿旋转轴线至少移动到第一滑动件位置和第二滑动件位置中,第一滑动件位置与耦联状态相配设,并且第二滑动件位置与解耦状态相配设。当然,也可行的是,第一滑动件位置与解耦状态相配设,并且第二滑动件位置与耦联状态相配设。因此,离合器组件可用于广泛的应用范围中。另外,由此实现离合器组件的简单且快速的可切换性。
[0017]
致动器可包括与滑动件连接的滑动件侧的磁体装置,所述滑动件侧的磁体装置能够通过定子侧的磁体装置来加载。就此而言,定子侧的磁体装置可对于滑动件的每个预限定的位置包括一个电磁线圈。因此,在离合器组件要切换到解耦状态和耦联状态的情况下,在定子侧的磁体装置内设置有两个电磁线圈。所述两个电磁线圈可选择性地亦或组合地通
电。视哪个电磁线圈被通电以及电流流过一个或多个被通电的电磁线圈的方向而定,滑动件通过滑动件侧的磁体装置移动到相配设的位置中。因此,滑动件可快速且可靠地运动到期望的位置中。
[0018]
在一种优选的实施方式中,定子侧的磁体装置支承在离合器组件的壳体上。
[0019]
在一种变型方案中,滑动件侧的磁体装置和定子侧的磁体装置用作磁性弹簧元件,滑动件通过该磁性弹簧元件支撑在定子上。如果将定子侧的磁体装置固定在离合器组件的壳体上,则滑动件弹性地支撑在壳体上。不仅从滑动件侧的磁体装置而且从定子侧的磁体装置都发出磁场。这两个磁场在各所述磁体装置之间的区域中叠加。因此,视所述磁场彼此之间的定向而定,滑动件被定子吸引或被定子排斥,吸引力和排斥力可取决于滑动件相对于定子的相对位置以及滑动件相对于定子的相对速度。因此,吸引力和排斥力用作弹簧力和/或阻尼力。
[0020]
此外,设置有传感器装置,借助该传感器装置能够检测滑动件沿旋转轴线的位置。由于操作挺杆与滑动件固定连接,因此也检测操作挺杆的位置。因此可通过传感器装置确定操作挺杆是否实际上以期望的方式与相应配设的棘爪相互作用。因此,传感器装置也能够检测棘爪的位置。因此,传感器装置也构成用于检测离合器组件是处于解耦状态还是处于耦联状态的器件。当离合器组件集成在机动车传动系中时,这点尤为重要。在这种应用情况下,在离合器组件可被用于传递转矩之前必须首先确保离合器组件处于耦联状态,即离合器是闭合的。这能够通过传感器装置简单且可靠地实现。由此,离合器组件运行特别可靠。此外,避免了在给尚未完全达到耦联状态的离合器加载转矩时发生所谓的转矩冲击或转矩撞击。这引起离合器组件的使用寿命提高以及较高的切换舒适性。与已知的离合器组件相比(在已知的离合器组件中代替使用传感器装置而仅等待一定的时间间隔以确保棘爪处于与耦联状态相配设的位置),借助根据本发明的离合器组件可快很多地释放转矩传递。由此,可实现特别快速的切换过程。
[0021]
在一种优选的实施方式中,设置有用于滑动件的位置调节回路,该位置调节回路包括致动器和传感器装置,从而滑动件沿旋转轴线的位置是能调节的。因此,操作挺杆与相应棘爪的相互作用也是能调节的。因此,可实现特别精确且快速的切换过程。
[0022]
优选地,每个所述操作挺杆通过朝向棘爪侧的挺杆端部方向渐缩的接触面与相应配设的棘爪相互作用,尤其是所述接触面具有锥形区段。因此,至少一定比例的接触面通过锥形区段形成。由此确保了相应配设的棘爪与操作挺杆轻柔地接合以及操作挺杆轻柔地释放相配设的棘爪。因此,得到离合器组件的基本上无冲击的切换特性。在一种优选的实施方式中,整个接触面构造为锥形面。尤其是产生上述效果和优点。
[0023]
在一种变型方案中,棘爪形成两组,第一组棘爪能引起棘爪承载件与棘爪配合元件在第一旋转方向上的不能相对转动的耦联,而第二组棘爪能引起棘爪承载件与棘爪配合元件在第二旋转方向上的不能相对转动的耦联,其中,第二旋转方向与第一旋转方向相反。因此,棘爪承载件和棘爪配合元件的耦联在两个彼此相反的旋转方向上进行。当然也可想到仅在一个唯一的旋转方向上发生旋转耦联的变型方案。
[0024]
此外,所述任务通过开头所提类型的、包括根据本发明的离合器组件的机动车传动系解决。在这种机动车传动系中,其不同的传递转矩的区段能够以传递转矩的方式快速且精确地连接并且彼此解耦。
[0025]
离合器组件可在总合变速器组件(summengetriebebaugruppe)中起作用,借助该总合变速器组件,第一电驱动马达和/或第二电驱动马达或者第一电驱动马达和/或内燃机能够以传递转矩的方式与机动车传动系的转矩从动端耦联。第一电驱动马达、第二电驱动马达或两个电驱动马达因此能够简单且快速地与转矩从动端、尤其是机动车的受驱动的车轮以传递转矩的方式连接或彼此解耦。相同情况适用于设置有第一电驱动马达和内燃机的变型方案。于是第一电驱动马达、内燃机或两者能够与转矩从动端、尤其是机动车的受驱动的车轮以传递转矩的方式连接或彼此解耦。在所有替代方案中,耦联和解耦快速且可靠地进行。
附图说明
[0026]
下面依据附图中示出的实施例来阐述本发明。附图中:
[0027]
图1示出根据本发明的、具有两个根据本发明的离合器组件的机动车传动系;
[0028]
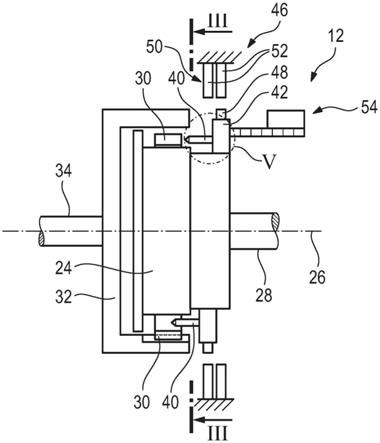
图2以示意图示出根据本发明的离合器组件;
[0029]
图3示出图2的离合器组件沿方向iii的视图,该离合器组件处于解耦状态;
[0030]
图4示出图3的视图,但离合器组件处于耦联状态;以及
[0031]
图5示出图2的离合器组件的细节v。
具体实施方式
[0032]
图1示出机动车传动系10,其中设有两个离合器组件12。
[0033]
两个离合器组件12都在总合变速器组件14中起作用,借助该总合变速器组件,第一电驱动马达16和/或第二电驱动马达18能够以传递转矩的方式与机动车传动系10的转矩从动端20耦联。
[0034]
在所示实施方式中,具有机动车传动系10的机动车的两个车轮22与转矩从动端20以传递转矩的方式耦联。
[0035]
因此,车轮22可或是通过第一电驱动马达16驱动或是通过第二电驱动马达18驱动。车轮22也可通过两个电驱动马达16、18同时驱动。
[0036]
在此,电驱动马达16、18中的用于驱动车轮22的那个电驱动马达总是通过所配设的离合器组件12在驱动方面与总合变速器组件14耦联。电驱动马达16、18中的不用于驱动车轮22的那个电驱动马达在驱动方面与总合变速器组件14解耦。
[0037]
在所示实施例中,两个离合器组件12构造相同。
[0038]
上面说明的机动车传动系10是纯电动地实施。当然也可考虑用内燃机代替电驱动马达16、18之一。于是机动车传动系10是混合动力的。类似地,可代替两个电驱动马达设置两个内燃机。
[0039]
图2详细示出离合器组件12之一。
[0040]
该离合器组件包括棘爪承载件24,该棘爪承载件在所示实施例中与能围绕旋转轴线26旋转的第一耦联元件28以不能相对转动的方式连接,所述耦联元件28是轴。
[0041]
多个棘爪30能枢转地固定在棘爪承载件24上(也参见图3和4)。
[0042]
此外,离合器组件12包括棘爪配合元件32,该棘爪配合元件在所示实施例中与能围绕旋转轴线26旋转的第二耦联元件34以不能相对转动的方式连接。
[0043]
第二耦联元件34也是轴。
[0044]
离合器组件12可占据两种状态。
[0045]
在图2的下半部以及图4中所示的耦联状态中,每个所述棘爪30沿周向形锁合地接合到相应配设的、设置在棘爪配合元件32上的耦联凹部36中。
[0046]
因此,在耦联状态中,棘爪承载件24和棘爪配合元件32以不能相对转动的方式彼此耦联。
[0047]
尤其是由图3和4得知,棘爪30形成两组。在此,第一组棘爪30的附图标记后面分别跟着“i”。
[0048]
借助这些棘爪30i能引起棘爪承载件24与棘爪配合元件32的不能相对转动的耦联,该不能相对转动的耦联在棘爪承载件24的第一旋转方向上起作用,第一旋转方向在图3和4中相应于顺时针方向。
[0049]
第二组棘爪30的附图标记后面分别跟着“ii”。第二组棘爪可引起棘爪承载件24与棘爪配合元件32的不能相对转动的耦联,该不能相对转动的耦联在第二旋转方向上起作用。在此,第二旋转方向与第一旋转方向相反。因此,第二旋转方向在图3和4中相应于棘爪承载件24沿逆时针方向的旋转。
[0050]
当前,仅示例性示出第一组的两个棘爪30和第二组的两个棘爪30。但原则上棘爪30的数量可自由选择。
[0051]
离合器组件12也可占据解耦状态,该解耦状态在图2的上半部和图3中示出。
[0052]
在解耦状态中,棘爪30定位在相应配设的耦联凹部36之外。
[0053]
因此,棘爪配合元件32和棘爪承载件24彼此在旋转上解耦。相同情况适用于与棘爪承载件24连接的第一耦联元件28和与棘爪配合元件32连接的第二耦联元件34。
[0054]
为了使离合器组件12始终占据所限定的位置,棘爪30借助相应配设的弹簧38加载到第一棘爪位置中。
[0055]
在图3和4所示的实施例中,弹簧38构造为拉力弹簧,从而棘爪30在离合器组件12的解耦状态中占据第一棘爪位置。换句话说,离合器组件12是所谓的常开离合器,其在未操作的状态中处于解耦状态。
[0056]
在耦联状态中,棘爪30占据第二棘爪位置。
[0057]
棘爪30能够借助相应配设的、支承在棘爪承载件24上的操作挺杆40克服相应配设的弹簧38的加载而转移到该第二棘爪位置中。
[0058]
因此,借助操作挺杆40可将相应配设的棘爪30挤压或加载到第二棘爪位置中。
[0059]
为此,操作挺杆40通过环形的滑动件42支承在棘爪承载件24上,使得滑动件42仅能沿旋转轴线26相对于棘爪承载件24移动。因此,视滑动件42的移动位置而定,由相应配设的操作挺杆40将棘爪30送入或不送入第二棘爪位置。
[0060]
每个所述操作挺杆40的接触面44朝向棘爪侧的挺杆端部方向渐缩,通过所述接触面,操作挺杆与相应配设的棘爪30相互作用。
[0061]
在所示实施方式中,接触面44是锥形面(尤其是参见图5)。
[0062]
此外,操作挺杆40至少沿旋转轴线26方向刚性地连接在滑动件42上。因此,尤其是操作挺杆40不能沿旋转轴线26方向相对于滑动件42运动。
[0063]
此外,操作挺杆40在没有中间元件的情况下固定在滑动件42上。因此,操作挺杆直
接作用在滑动件42上。
[0064]
为了使操作挺杆40运动,滑动件42与致动器46连接为,使得滑动件能够沿旋转轴线26至少移动到第一滑动件位置和第二滑动件位置中。
[0065]
在此,第一滑动件位置与离合器组件12的耦联状态相配设,并且第二滑动件位置与离合器组件12的解耦状态相配设。
[0066]
致动器46为此包括滑动件侧的磁体装置48,该滑动件侧的磁体装置在所示实施方式中构造为永磁环。
[0067]
此外,致动器46还包括定子侧的磁体装置50,该定子侧的磁体装置在所示实施方式中包括两个电磁线圈52,图2中左侧示出的电磁线圈52与耦联状态相配设,而图2中右侧示出的电磁线圈52与解耦状态相配设。
[0068]
借助定子侧的磁体装置50、即通过电磁线圈52可加载滑动件侧的磁体装置48。由此,可使滑动件42移动到第一滑动件位置和第二滑动件位置中。
[0069]
此外,滑动件侧的磁体装置48和定子侧的磁体装置50用作磁性弹簧元件,滑动件42通过该弹簧元件支撑在定子上。在此,定子例如支承在离合器组件12的未详细示出的壳体中。
[0070]
离合器组件12还包括传感器装置54,该传感器装置在图2中仅以标识示出。
[0071]
借助该传感器装置54能够检测滑动件42沿旋转轴线26的位置。
[0072]
由于操作挺杆40与滑动件42刚性耦联,因此也可通过传感器装置54间接地检测操作挺杆40的位置。
[0073]
从操作挺杆40的位置又导出棘爪30的位置,从而最终能够借助传感器装置54检测棘爪30的位置或状态,并且因此能够检测离合器组件12是处于解耦状态还是处于耦联状态。
[0074]
在所示实施方式中,传感器装置54和致动器46是用于滑动件42的位置调节回路的组成部件。因此,滑动件42沿旋转轴线26的位置是能调节的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1