一种智能通信检修装置的巡检机器人的制作方法
[0001]
本发明涉及一种通信设备,具体涉及一种智能通信检修装置的巡检机器人,尤其涉及一种能够对通信杆上的通信设备进行自动检修的智能通信检修装置。
背景技术:
[0002]
随着通信网络的不断发展进一步的促进了通信基础设施的不断建设,其中在现在的通信基础设施中,通信线杆是必备的设备之一,通过通信线杆的建设进一步的达到网路覆盖的目的,其中在现在的通信线杆的安装和检修的过程中,安装时需要通过人工攀爬到通信杆上以后,再由人工通过拉绳将通信模块提升至通信杆上,然后再进行安装,从而完成通信模块的安装,其中在现在通信模块的检修过程中,同样的需要工作人员攀爬到通信杆上,然后再进行检修作业,从而完成通信杆的检修作业,保证到通信模块的正常工作,虽然通过人工能够完成通信模块的安装和检修,但是还存在以下问题:在对通信模块进行安装的过程中,工作人员攀爬到通信杆的顶部后再由人工通过拉绳对通信模块进行提升,虽然通过人工能够完成通信模块的提升,但是由于高度的限制,并且通信杆的数量较多,所以就造成了工作量的增加,导致了安装效率低下的问题;同时在对通信杆上的通信模块进行检修的过程中,同样的需要工作人员攀爬大通信杆上以后进行检修,当通信杆的数量较多的情况下,就需要反复的攀爬通信杆,进而导致了检修效率低下,同时增加了通信模块的检修维护成本;其中在通过无人机进行通信模块的巡检过程中,无人机仅能对单个杆体上的通信模块进行检修,由于无人机电量的限制,所以检修的效率极其的低下,随时都有返航的可能,进而导致了无人机检修无法推广的问题。
[0003]
所以,有必要设计一种智能通信检修装置的巡检机器人,以解决上述技术问题。
技术实现要素:
[0004]
(一)解决的技术问题针对现有技术不足,提供一种智能通信检修装置的巡检机器人,本发明在控制机体上设置有伸缩滑动的挤压件,在挤压件上分别设置有转动的支撑转管,在支撑转管上分别设置有顶压轮,在控制机体上还设置有滑动的顶压滑块,在顶压滑块上设置有转动的驱动转轮,在控制机体上还设置有压紧模块,从而能够进一步的使控制机体在灯杆上滑动,进而对通信模块进行检修作业,大大的提高了检修效率。
[0005]
(二)技术方案本发明通过以下技术方案实现:一种智能通信检修装置的巡检机器人,所述巡检机器人包括有控制机体、挤压件、顶压滑块、压紧模块、视频伸缩模块、升降盘、伸缩压紧架;所述控制机体上设置有一个机体滑槽,所述机体滑槽的两侧分别设置有一个滑动的挤压件,所述挤压件上分别设置有一个转动的支撑转管,所述支撑转管上分别设置有一个多
个滑动的顶压轮;所述顶压滑块设置有多个且分别在所述控制机体上伸缩滑动,所述顶压滑块上分别设置有一个转动的驱动转轮;所述压紧模块设置有连个,所述压紧模块分别设置在所述机体滑槽的两端,所述压紧模块上分别设置有一个转动的拉绳驱动轮,所述压紧模块还设置有摆动的挤压滑块,所述挤压滑块上分别设置有转动的压紧轮,所述压紧转轮与所述拉绳驱动轮相对应;所述视频伸缩模块设置在所述控制机体上,所述视频伸缩模块上设置有伸缩滑动的摄像头;所述升降盘在所述控制机体内升降滑动,所述伸缩压紧架在所述升降盘内伸缩滑动,所述伸缩压紧架伸展开以后所述升降盘的的升降滑动控制所述伸缩压紧架的摆动。
[0006]
优选的,所述机体滑槽的两侧分别设置有一个第一滑槽,所述挤压件分别在所述第一滑槽内滑动,所述挤压件上分别设置有驱动所述支撑转管转动的第四电机,所述顶压轮分别呈圆环状设置,所述顶压轮和所述支撑转管之间分别通过多个第二弹簧相对应连接,所述顶压轮并排设置在所述支撑转管上;所述机体滑槽的两侧分别包括有一个在所述控制机体2内转动的第二转轴,所述第一滑槽内分别设置有一个在所述控制机体内转动的第一转轴,所述第一转轴和所述第二转轴上分别设置有一个相对应啮合连接的第一锥齿轮,所述挤压件上分别设置有一个第一螺纹孔,所述第一螺纹孔内分别设置有一个相对应啮合连接的第一螺纹杆,所述第一螺纹杆和所述第一转轴之间分别通过一个第三弹簧相对应连接,所述第二转轴上分别设置有一个第一链轮,两个第一链轮之间分别通过一个第一链条相对应连接,所述控制机体内设置有驱动所述第二转轴转动的第五电机。
[0007]
优选的,所述压紧模块上设置有与所述机体滑槽相对应连通的第三滑槽,所述第三滑槽内分别设置有一个支撑所述挤压滑块摆动的第二支撑轴,所述挤压滑块上分别设置有一个第一支撑轴,所述第一支撑轴上分别设置有一个转动的第一拉杆,所述压紧模块内设置有一个横向滑动的提升件,所述压紧模块内设置有一个第一私服电机驱动的第二螺纹杆,所述提升件上设置有与所述第二路我杆相对应啮合连接的螺纹孔,所述压紧模块内设置有驱动所述拉绳驱动轮转动的电机。
[0008]
优选的,所述控制机体内设置有一个存储内腔,所述控制机体呈圆形设置,所述控制机体的外圈设置有多个第二滑槽,所述顶压滑块分别在所述第二滑槽内滑动,所述第二滑槽内分别设置有一个第一顶压气囊,所述第一顶压气囊分别顶压在所述顶压滑块上,所述第二滑槽内分别设置有拉紧所述顶压滑块滑动的第一弹簧,所述顶压滑块上设置有驱动所述驱动转轮转动的第三电机,所述第一顶压气囊上分别连接有一个第一连接气管,所述第一连接气管连接在所述存储内腔上,所述控制机体内设置有控制所述第一连接气管排气和进气的第一控制阀。
[0009]
优选的,所述视频伸缩模块设置有两个,所述视频伸缩控制模块上设置有一个伸缩滑孔,所述伸缩滑孔内设置有一个第二顶压气囊,所述摄像头设置在所述第二顶压气囊上,所述第二顶压气囊上设置有一个第二连接气管,所述第二连接气管连接在所述存储内腔上,所述视频伸缩模块内设置有控制所述第二连接气管排气和进气的第二控制阀,所述视频伸缩模块内设置有一个电机驱动的第二拉绳轮,所述第二拉绳轮上设置有一个第二拉
绳,所述第二拉绳的端部连接在所述摄像头上。
[0010]
优选的,所述第一控制阀和所述第二控制阀分别包括有一个阀体,所述阀体上分别设置有一个第一气孔,所述阀体内分别设置有一个密封腔,所述密封腔内分别设置有一个滑动的密封滑块,所述第一气孔与所述密封腔相对应连通,所述密封滑块上设置有一个第一连通孔,所述密封滑块内设置有一个与所述第一连通孔相对应连通的第二连通孔,所述密封腔一端设置有一个拉动所述密封滑块滑动的第五弹簧,所述密封腔的另一端设置有一个电磁铁,电磁铁通电后磁吸连接所述密封滑块滑动,所述第一连通孔与所述第一气孔相对应连通,所述电磁铁断电后所述第一连通孔与所述排气孔相对应连通,所述第二连通孔与所述第一连通孔相对应连通。
[0011]
优选的,所述升降盘呈圆形设置,所述控制机体上设置有支撑所述升降盘滑动的第四滑槽,所述升降盘的底部设置有一个升降模块,所述控制机体内设置有一个第三私服电机驱动的第三螺纹杆,所述升降膜孔在所述控制机体上所设的滑动内滑动,所述升降模块上设置有与所述第三螺纹杆相对应啮合连接的螺纹孔,所述伸缩压紧架设置有至少4个,所述升降盘上设置有支撑所述伸缩压紧架滑动的升降盘滑孔,所述升降盘滑孔内分别设置有一个顶压支架,所述升降盘滑孔的端部分别包括有一个设置在所述升降盘上的升降盘槽,所述升降盘槽内分别设置有一个第三支撑轴,所述升降盘的端部还分别设置有与所述升降盘槽相对应的支撑滑槽,所述支撑滑槽内分别设置有与所述第三支撑轴相对应的第四支撑轴,所述伸缩压紧架上分别设置有一个第四滑槽,所述伸缩压紧架通过所述第四滑槽在所述第三支撑轴和第四支撑轴上滑动,所述顶压支架和所述伸缩压紧架之间分别通过一个第四弹簧相对应连接,所述第四弹簧分别弹压所述伸缩压紧架滑动,所述升降盘的中心位置设置有一个转动的第三拉绳轮,所述伸缩压紧架的端部分别设置有一个第三拉绳,所述第三拉绳分别缠绕连接在所述第三拉绳轮上,所述升降模块上设置有一个驱动所述第三拉绳轮转动的第二私服电机;所述控制机体的一端设置有一个第一磁铁,所述控制机体的另一端设置有一个第二磁铁,所述控制机体叠加后所述第一磁铁和所述第二磁铁磁吸连接。
[0012]
优选的,本申请还包括一种智能通信检修装置,包括所述的一种智能通信检修装置的巡检机器人。
[0013]
(三)有益效果本发明提供了一种智能通信检修装置,具备以下有益效果:通过无人机将控制平台吊装到通信灯杆的顶部,在控制机体上设置有挤压滑块,在挤压滑块上设置有转动的顶压轮,通过挤压滑块带动顶压轮滑动后能够进一步的使挤压轮压紧在伸缩轴上,进而能够带动控制机体的滑动,在控制机体的外圈还设置有转动的驱动转轮,通过驱动转轮的转动能够带动控制机体的旋转,能够使挤压轮压紧在伸缩轴上,进而使控制机体在伸缩轴上滑动,通同时能够通过升降平台的转动带控制机体围绕通信模块旋转,在控制机体上设置有摄像头,进而能够通过摄像头对通信模块进行巡检,大大的提高了通信模块的巡检效率,避免了通过无人机巡检造成的效率底下的问题;在控制机体上设置有压紧模块,在压紧模块上设置有摆动的压紧模块,在压紧模块上分别设置有一个转动的压紧轮,在压紧模块内还设置有转动的拉绳驱动轮,通过压紧轮和拉绳驱动轮的转动,能够使控制机体在杆体上滑动,进而对通信模块进行巡检,同时通过视
频伸缩模块上的伸缩滑动的摄像头能够对通信模块进行远程的巡检,通过控制机体两端设置的第一磁铁和第二磁铁在控制机体叠加的状态下,能够连接在一起,进而对多个控制机体进行吊装运输,大大的提高了对通信模块的检修效率,避免单一的无人机巡检造成的效率低下的问题。
附图说明
[0014]
下面结合附图对本发明做进一步说明。
[0015]
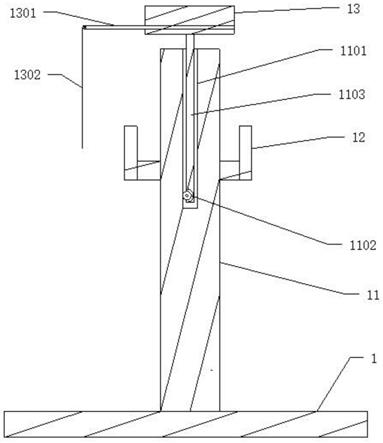
图1为本发明实施例智能通信检修装置整体结构示意图。
[0016]
图2为本发明实施例升降平台整体结构示意图。
[0017]
图3为本发明实施例控制机体整体结构示意图。
[0018]
图4为本发明实施例控制机体整体结构俯视图。
[0019]
图5为本发明实施例挤压滑块整体结构示意图。
[0020]
图6为本发明实施例压紧模块整体结构示意图。
[0021]
图7为本发明实施例视频伸缩模块整体结构示意图。
[0022]
图8为本发明实施例伸缩压紧架整体结构示意图。
[0023]
图9为本发明实施例阀体结构示意图。
[0024]
图中:1固定底座、11杆体、1101灯杆滑槽、1102第一驱动齿轮、1103升降轴、1104第一电机;12通信模块;13升降平台、1301伸缩轴、1302第一拉绳、1303平台凹槽、1304平台口、1305第一拉绳轮、1306弹性支架、1307第一齿轮、1308第二电机;2控制机体、2001机体滑槽、2002第一滑槽;21挤压滑块、2101存储内腔、2102第二滑槽、2103顶压滑块、2104驱动转轮、2105第一弹簧、2106第一顶压气囊、2107第一连接气管、2108第三电机、2109顶压轮、2110第二弹簧、2111支撑转管、2112第四电机、2113第一磁铁、2114第二磁铁、2115第一螺纹杆、2116第三弹簧、2117第一转轴、2118第一螺纹孔、2119第一锥齿轮、2120第二转轴、2121第一链轮、2122第一链条、2123第五电机、2124第一控制阀;22压紧模块、2201第三滑槽、2202挤压滑块、2203第一支撑轴、2204第二支撑轴、2205第一拉杆、2206压紧轮、2207拉绳驱动轮、2208提升件、2209第一私服电机、2210第二螺纹杆;23视频伸缩模块、2301伸缩滑孔、2302摄像头、2303第二顶压气囊、2304第二连接气管、2305第二控制阀、2306第二拉绳轮、2307第二拉绳;24伸缩压紧架、2401第四滑槽、2402第五滑槽、2403支撑滑槽、2404升降盘、2405升降盘滑孔、2406顶压支架、2407第三支撑轴、2408第四支撑轴、2409升降盘槽、2410第四弹簧、2411第三拉绳、2412第三拉绳轮、2413第二私服电机、2414升降模块、2415第三私服电机、2416第三螺纹杆;25阀体、2501第一气孔、2502密封腔、2503密封滑块、2504电磁铁、2505第一连通孔、2506第二连通孔、2507排气孔、2508第五弹簧。
具体实施方式
[0025]
如图1至图9所示,一种智能通信检修装置,包括有智能通信杆、巡检机器人;所述智能通信杆包括有杆体11、通信模块12、升降平台13、伸缩轴1301、第一拉绳1302;所述通信模块12设置在所述灯杆体11上,所述升降平台13在所述杆体11上升降滑动,所述伸缩轴1301在所述升降平台13上伸缩滑动,所述第一拉绳1302在所述伸缩轴1301的端部滑动,所述升降平台13上设置有一个平台凹槽1303,所述升降平台13上设置有一个与所述平台凹槽1303相对应连通的平台口1304,所述伸缩轴1301穿过所述平台口1304在所述平台凹槽1303的底部滑动。
[0026]
在杆体11的底部设置有固定底座1,通过固定底座1对杆体11进行支撑,在所述杆体1上设置有通信模块12,在杆体11的顶部设置有一个升降的升降平台13,升降平台13能够在杆体11的顶部升降,伸缩轴1301能够在升降平台13横向的伸缩滑动,在所述伸缩轴1301的端部设置有一个第一拉绳1302,在所述升降平台13上设置有一个平台凹槽1303,在升降平台13的一侧还设置有余所述平台凹槽1303相对应连通的平台口1304,伸缩轴1301在平台凹槽1303的底部滑动,且穿过所述平台口1304滑动,在对通信模块12进行安装的过程中,能够通过第一拉绳1302的升降进一步的提升通信模块12,从而避免人工提升造成的麻烦,大大的提高了安装效率,同时通过升降平台13的旋转能够调整通信模块12的安装位置,进而提高安装效率。
[0027]
所述巡检机器人包括有控制机体2、挤压件21、顶压滑块2103、压紧模块22、视频伸缩模块23、升降盘2404、伸缩压紧架24;所述控制机体2上设置有一个机体滑槽2001,所述机体滑槽2001的两侧分别设置有一个滑动的挤压件21,所述挤压件21上分别设置有转动的支撑转管2111,所述支撑转管2111上分别设置有一个多个滑动的顶压轮2109。
[0028]
在控制机体2上设置有一个机体滑槽2001,机体滑槽2001设置在所述控制机体2的底部,在所述机体滑槽2001的两侧分别设置有一个滑动的挤压件21,挤压件21设置在所述控制机体2的中心位置,在所述挤压件21上分别设置有两个转动的支撑转管2111,在支撑转管2111上分别设置有多个顶压轮2109,顶压轮2109分别呈圆环状设置,所述顶压轮2109叠加设置在支撑转管2111上,通过挤压件21的滑动能够使顶压轮2109压紧在伸缩轴1301上,从而能够通过顶压轮2109的转动带动控制机体2在伸缩轴1301上滑动。
[0029]
所述顶压滑块2103设置有多个且分别在所述控制机体2上伸缩滑动,所述顶压滑块2103上分别设置有一个转动的驱动转轮2104。
[0030]
控制机体2呈圆形设置,顶压滑块2103设置有至少4个,所述顶压滑块2103分别在所述控制机体2上舍所滑动,在所述顶压滑块2103上分别设置有一个转动的驱动转轮2104。
[0031]
所述压紧模块22设置有连个,所述压紧模块22分别设置在所述机体滑槽2001的两端,所述压紧模块22上分别设置有一个转动的拉绳驱动轮2207,所述压紧模块22还设置有摆动的挤压滑块2202,所述挤压滑块2202上分别设置有转动的压紧轮2206,所述压紧转轮2206与所述拉绳驱动轮2207相对应。
[0032]
压紧模块22设置有两个,分别设置在所述机体滑槽2001的两端,在压紧模块22上分别设置有一个转动的拉绳驱动轮2207,在压紧模块22的两侧还分别设置有一个摆动的挤压滑块2202,在挤压滑块2202上分别设置有一个转动的压紧轮2206,通过两个挤压滑块
2202的摆动能够带动压紧轮2206的摆动。
[0033]
所述视频伸缩模块23设置在所述控制机体2上,所述视频伸缩模块23上设置有伸缩滑动的摄像头2302。
[0034]
在控制机体2上设置有两个伸缩滑动的视频伸缩模块23,在视频伸缩模块23上分别设置有一个摄像头2302,通过摄像头2303伸出后能够对通信模块12进行巡检,进一步的避免了通过人工巡检造成的麻烦,提高了巡检效率,避免人工巡检造成的麻烦。
[0035]
所述升降盘2404在所述控制机体2内升降滑动,所述伸缩压紧架24在所述升降盘2404内伸缩滑动,所述伸缩压紧架24伸展开以后所述升降盘2404的的升降滑动控制所述伸缩压紧架24的摆动。
[0036]
在控制机体2内设置有一个升降滑动的升降盘2404,升降盘2404呈圆形设置,在升降盘2404上设置有多个伸缩滑动的伸缩压紧架24,当所述伸缩压紧架24伸出后,通过所述升降盘2404的上下滑动控制所述伸缩压紧架24的摆动。
[0037]
所述控制机体2投入到所述平台凹槽1303内后,所述驱动转轮2104在所述平台凹槽1303的外壁上转动,所述机体滑槽2001与所述伸缩轴1301相对应,所述顶压轮2109压紧在所述伸缩轴1301上转动,所述控制机体2穿过所述平台口1304,所述拉绳驱动轮2207顶压在所述第一拉绳1302上以后,所述压紧轮2206压紧在所述第一拉绳1302上,所述伸缩压紧架24压紧在所述平台凹槽1303的顶部摆动。
[0038]
通过无人机将控制机体2输送到平台凹槽1303内,控制机体2串联在一起,进而通过无人机能够将控制机体2投送到平台凹槽1303内;平台凹槽1303呈圆形设置,且在平台凹槽1303的端部设置有成倾斜状的端面,通过无人机能够将控制机体2运输到所述平台凹槽1303内,通过驱动转轮2104在所述平台凹槽1303的倾斜端面上转动,进而调整控制机体2的位置,从而能够使机体滑槽2001对准在伸缩轴1301上,进而能够使顶压轮2109压紧在伸缩轴1301上,从而能够通过顶压轮2109的转动进一步的带动控制机体2上滑动,控制机体2穿过平台口1304后滑动到伸缩轴1301的端部后拉绳驱动轮2207压紧在所述第一拉绳1302上,通过所述压紧轮2206的摆动能够将第一拉绳1302压紧在拉绳驱动轮2207上,从而能够通过拉绳驱动轮2207的转动进而能够使控制机体2在第一拉绳1302上滑动,通过所述摄像头2302的伸缩滑动后,能够通过摄像头2302对通信模块12进行巡检,达到自动巡检的目的,大大的提高了巡检的效率,进而保证到通信模块12的正常工作,避免了人工攀爬造成的巡检效率低下的问题。
[0039]
如图1和图2所示,所述杆体11的底部设置有固定底座1,在所述杆体11上设置有一个灯杆滑槽1101,所述升降平台13上设置有一个在所述灯杆滑槽1101内滑动的升降轴1103,所述升降轴1103的底部设置有一个电机驱动的第一驱动齿轮1102,所述灯杆滑槽1101内设置有与所述第一驱动齿轮1102相对应啮合连接的齿槽;所述升降轴1103上设置有一个驱动所述升降平台13转动的第一电机1104,所述升降平台13内设置有一个第二电机1308驱动的第一齿轮1307,所述伸缩轴1301呈t型设置,所述伸缩轴1301的底部设置有与所述第一齿轮1307相对应啮合连接的齿槽;所述伸缩轴1301的端部设置有一个电机驱动的第一拉绳轮1305,所述第一拉绳1302设置在所述第一拉绳轮1305上,所述伸缩轴1301的端部设置有一个支撑所述第一拉绳1302滑动的弹性支架1306。
[0040]
在灯杆11上设置有一个灯杆滑槽1101,在升降平台13上设置有一个升降轴1103,升降轴1103在所述灯杆滑槽1101内滑动,在所述升降轴1103的端部设置有一个电机驱动的第一齿轮1307,在灯杆滑槽1101的一侧设置有与所述第一齿轮1307相对应啮合连接的齿槽,从而能够通过第一齿轮1307与齿槽相对应啮合连接,进而能够使升降轴1103升降滑动,从而能够控制所述升降平台13的升降;在伸缩轴1301的端部设置有一个电机驱动的第一拉绳轮1305,第一拉绳1302设置在第一拉绳轮1305上,从而能够通过第一拉绳轮1305的转动带动第一拉绳1302的伸缩滑动,从而能够通过第一拉绳1302的伸缩滑动能够带动通信模块12的升降,从而避免人工提升通信模块12造成的麻烦,大大的提高了安装效率,在伸缩轴1301的端部设置有一个弹性支架1306,第一拉绳1302具有一定的弹性,且所述弹性支架1306呈弧形设置,第一拉绳1302能够在弹性支架1306上滑动,当所述控制机体2在所述伸缩轴1301上滑动到其端部后,所述压紧模块22两侧的挤压滑块2202摆动,从而能够使压紧轮2206同步摆动后将第一拉绳1302压紧在拉绳驱动轮2207上,通过电机驱动所述拉绳驱动轮2207转动,进而能够控制所述控制机体2在第一拉绳1302上滑动,通过弹性支架1306能够对第一拉绳1302进行支撑,从而能够使压紧轮2206将第一拉绳1302压紧在拉绳驱动轮2207上。
[0041]
在控制机体上设置有压紧模块,在压紧模块上设置有摆动的压紧模块,在压紧模块上分别设置有一个转动的压紧轮,在压紧模块内还设置有转动的拉绳驱动轮,通过压紧轮和拉绳驱动轮的转动,能够使控制机体在杆体上滑动,进而对通信模块进行巡检,同时通过视频伸缩模块上的伸缩滑动的摄像头能够对通信模块进行远程的巡检,通过控制机体两端设置的第一磁铁和第二磁铁在控制机体叠加的状态下,能够连接在一起,进而对多个控制机体进行吊装运输,大大的提高了对通信模块的检修效率,避免单一的无人机巡检造成的效率低下的问题。
[0042]
如图1至图5所示,所述机体滑槽2001的两侧分别设置有一个第一滑槽2002,所述挤压件21分别在所述第一滑槽2002内滑动,所述挤压件21上分别设置有驱动所述支撑转管2111转动的第四电机2112,所述顶压轮2109分别呈圆环状设置,所述顶压轮2109和所述支撑转管2111之间分别通过多个第二弹簧2110相对应连接,所述顶压轮2109并排设置在所述支撑转管2111上。
[0043]
在机体滑槽2001的两侧分别设置有第一滑槽2002,通过第一滑槽2002对所述挤压件21进行支撑,从而能够保证到所述挤压件21的正常滑动,通过所述第四电机2112驱动所述支撑转管2111转动,在顶压轮2109和所述支撑转管2111之间分别通过多个第二弹簧2110相对应连接,当所述顶压件21滑动后,能够将顶压轮2109顶压在所述伸缩轴1301上,通过第二弹簧2110拉紧所述顶压轮2109的弹性压紧在伸缩轴1301上转动,进而能够控制所述控制机体2的滑动。
[0044]
所述机体滑槽2001的两侧分别包括有一个在所述控制机体2内转动的第二转轴2120,所述第一滑槽2002内分别设置有一个在所述控制机体2内转动的第一转轴2117,所述第一转轴2117和所述第二转轴2120上分别设置有一个相对应啮合连接的第一锥齿轮2119,所述挤压件21上分别设置有一个第一螺纹孔2118,所述第一螺纹孔2118内分别设置有一个相对应啮合连接的第一螺纹杆2115,所述第一螺纹杆2115和所述第一转轴2117之间分别通过一个第三弹簧2116相对应连接,所述第二转轴2120上分别设置有一个第一链轮2121,两
个第一链轮2121之间分别通过一个第一链条2122相对应连接,所述控制机体2内设置有驱动所述第二转轴2120转动的第五电机2123。
[0045]
在机体滑槽2001的两侧分别设置有一个转动的第二转轴2120,通过所述第五电机2123驱动所述第二转轴2120转动,通过第一链条2122将两个第一链轮2121连接,进而能够使两个第二转轴2120同步转动,同时通过两个第一锥齿轮2119的相对应啮合连接,进而能够使两个第一转轴2117同步转动,在第一转轴2117和第一螺纹杆2115之间通过一个第三弹簧2116相对应连接,能够带动第一螺纹杆2115的转动,第一螺纹杆2115和第一螺纹孔2118相对应啮合连接,从而能够孔所述挤压件21的同步伸缩滑动,同时在第一螺纹杆2115和第一转轴2117之间通过第三弹簧2116相对应连接,进而通过第三弹簧2116的弹性能够弹压所述挤压件21的滑动,能够大大的提高顶压轮2109的压紧力。
[0046]
如图1至图6所示,所述压紧模块22上设置有与所述机体滑槽2001相对应连通的第三滑槽2201,所述第三滑槽2201内分别设置有一个支撑所述挤压滑块2202摆动的第二支撑轴2204,所述挤压滑块2202上分别设置有一个第一支撑轴2203,所述第一支撑轴2203上分别设置有一个转动的第一拉杆2205,所述压紧模块22内设置有一个横向滑动的提升件2208,所述压紧模块22内设置有一个第一私服电机2209驱动的第二螺纹杆2210,所述提升件2208上设置有与所述第二路我杆2210相对应啮合连接的螺纹孔,所述压紧模块22内设置有驱动所述拉绳驱动轮2207转动的电机。
[0047]
在压紧模块22上分别设置有一个与所述机体滑槽2001相对应的凹槽,在所述压紧模块22上还分别设置有第三滑槽2201,通过所述第一私服电机2209驱动所述第二螺纹杆 2210转动,第二螺纹杆2210和所述提升件2208上的螺纹孔相对应啮合连接,进而能够控制所述提升件2208的滑动,通过提升件2208的滑动同时拉动第一拉杆2205的滑动,通过第一拉杆2205拉动所述挤压滑块2202摆动,从而能够使压紧轮2206将第一拉绳1302压紧在拉绳驱动轮2207上,通过电机驱动所述拉绳驱动轮2207的转动,进而能够使控制机体2在第一拉绳1302上滑动,挤压滑块2202为多边形的滑块,通过第二支撑轴2204能够支撑所述挤压滑块2202摆动,通过第一支撑轴2203能够对第一拉杆2205的摆动进行控制。
[0048]
如图3所示,所述控制机体2内设置有一个存储内腔2101,所述控制机体2呈圆形设置,所述控制机体21的外圈设置有多个第二滑槽2102,所述顶压滑块2103分别在所述第二滑槽2102内滑动,所述第二滑槽2102内分别设置有一个第一顶压气囊2106,所述第一顶压气囊2106分别顶压在所述顶压滑块2103上,所述第二滑槽2102内分别设置有拉紧所述顶压滑块2103滑动的第一弹簧2105,所述顶压滑块2103上设置有驱动所述驱动转轮2104转动的第三电机2108,所述第一顶压气囊2106上分别连接有一个第一连接气管2107,所述第一连接气管2107连接在所述存储内腔2101上,所述控制机体2内设置有控制所述第一连接气管2107排气和进气的第一控制阀2124。
[0049]
在控制机体2内设置有一个存储内腔2101,通过存储内腔2101存储压缩空气,所述控制机体2呈圆形设置,在控制机体2的外圈设置有多个第二滑槽2102,顶压滑块2103分别在所述第二滑槽2102内滑动,当所述第一连接气管2107充气后膨胀,从而能够推动所述顶压滑块2103滑动,当第一连接气管2107排气后,通过所述第一弹簧2105拉动所述顶压滑块2103收缩至第二滑槽2102内,进而能够使驱动转轮2104收缩,从而能够使控制机体2滑动到平台凹槽1303内,通过第一控制阀2124能够对第一连接气管2107的排气和充气,进而能够
使对驱动转轮2104的伸缩进行控制。
[0050]
如图3、图4和图7所示,所述视频伸缩模块23设置有两个,所述视频伸缩控制模块23上设置有一个伸缩滑孔2301,所述伸缩滑孔2301内设置有一个第二顶压气囊2303,所述摄像头2302设置在所述第二顶压气囊2303上,所述第二顶压气囊2303上设置有一个第二连接气管2304,所述第二连接气管2304连接在所述存储内腔2101上,所述视频伸缩模块23内设置有控制所述第二连接气管2304排气和进气的第二控制阀2305,所述视频伸缩模块23内设置有一个电机驱动的第二拉绳轮2306,所述第二拉绳轮2306上设置有一个第二拉绳2307,所述第二拉绳2307的端部连接在所述摄像头2302上。
[0051]
在视频伸缩模块23上设置有一个伸缩滑孔2301,通过所述第二连接气管2304通气后能够控制所述第二顶压气囊2303的通气和排气,当第二顶压气囊2303通气后能够顶压所述摄像头2302的伸出,通过摄像头2302能够对通信模块12进行视频的巡检,当第二顶压气囊2303排气后通过第二拉绳轮2306的转动拉动摄像头2302滑动,进而能够使摄像头2302收缩至伸缩滑孔2301内。
[0052]
如图9所示,所述第一控制阀2124和所述第二控制阀2305分别包括有一个阀体25,所述阀体25上分别设置有一个第一气孔2501,所述阀体25内分别设置有一个密封腔2502,所述密封腔2502内分别设置有一个滑动的密封滑块2503,所述第一气孔2501与所述密封腔2502相对应连通,所述密封滑块2503上设置有一个第一连通孔2505,所述密封滑块2503内设置有一个与所述第一连通孔2505相对应连通的第二连通孔2506,所述密封腔2502一端设置有一个拉动所述密封滑块2503滑动的第五弹簧2508,所述密封腔2502的另一端设置有一个电磁铁2504,电磁铁2504通电后磁吸连接所述密封滑块2503滑动,所述第一连通孔2505与所述第一气孔2501相对应连通,所述电磁铁2504断电后所述第一连通孔2505与所述排气孔2507相对应连通,所述第二连通孔2506与所述第一连通孔2505相对应连通。
[0053]
阀体25设置有两个,第一连接气管2107和第二连接气管2304分别连接在所述第一气孔2501上,当电磁铁2504通电后,能够磁吸连接所述密封滑块2503滑动,进而能够使第一连通孔2505和所述第一气孔2501相对应连通,从而能够使第一连接气管2107和第二连接气管2304处于连通的状态,当电磁铁2504处于断电后,通过第五弹簧2508拉动所述密封滑块2503滑动,进而能够使第一连通孔2505连通在排气孔2507上,第二连通孔2506连通在第一气孔2501上,进而能够对第一顶压气囊2106和第二顶压气囊2303排气,进而控制所述第一顶压气囊2106和第二顶压气囊2303排气和进气。
[0054]
如图3和图8所示,所述升降盘2404呈圆形设置,所述控制机体2上设置有支撑所述升降盘2404滑动的第四滑槽2402,所述升降盘2404的底部设置有一个升降模块2414,所述控制机体2内设置有一个第三私服电机2415驱动的第三螺纹杆2416,所述升降膜孔414在所述控制机体2上所设的滑动内滑动,所述升降模块2414上设置有与所述第三螺纹杆2416相对应啮合连接的螺纹孔,所述伸缩压紧架24设置有至少4个,所述升降盘2404上设置有支撑所述伸缩压紧架24滑动的升降盘滑孔2405,所述升降盘滑孔2405内分别设置有一个顶压支架2406,所述升降盘滑孔2405的端部分别包括有一个设置在所述升降盘2404上的升降盘槽2409,所述升降盘槽2409内分别设置有一个第三支撑轴2407,所述升降盘2404的端部还分别设置有与所述升降盘槽2409相对应的支撑滑槽2403,所述支撑滑槽2403内分别设置有余所述第三支撑轴2407相对应的第四支撑轴2408,所述伸缩压紧架24上分别设置有一个第四
滑槽2401,所述伸缩压紧架24通过所述第四滑槽2401在所述第三支撑轴2407和第四支撑轴2408上滑动,所述顶压支架2406和所述伸缩压紧架24之间分别通过一个第四弹簧2410相对应连接,所述第四弹簧2410分别弹压所述伸缩压紧架24滑动,所述升降盘2404的中心位置设置有一个转动的第三拉绳轮2412,所述伸缩压紧架24的端部分别设置有一个第三拉绳2411,所述第三拉绳2411分别缠绕连接在所述第三拉绳轮2412上,所述升降模块2414上设置有一个驱动所述第三拉绳轮2412转动的第二私服电机2413;所述控制机体2的一端设置有一个第一磁铁2113,所述控制机体2的另一端设置有一个第二磁铁2114,所述控制机体2叠加后所述第一磁铁2113和所述第二磁铁2113磁吸连接。
[0055]
升降盘2404呈圆形设置,在控制机体2内设置有一个第四滑槽2402,通过第四滑槽2402对升降盘2404进行支撑,通过第三私服电机2415的转动带动第三螺纹杆2416转动,升降模块2414上设置有与所述第三螺纹杆2416相对应啮合连接的螺纹孔,进而控制所述升降盘2404的升降;伸缩压紧架24设置有至少4个,在升降盘2404上设置有支撑所述伸缩压紧架24滑动的升降盘滑孔2504,通过升降盘滑孔2504能够对伸缩压紧架24的滑动进行支撑,通过所述第四弹簧2410弹压所述伸缩压紧架24滑动,进而能够使伸缩压紧架24伸展开,在所述伸缩压紧架24上分别设置有一个第四滑槽2401,第四滑槽2401为一个长方形的槽,在所述升降盘槽2409内分别设置有一个第三支撑轴2407,在所述支撑滑槽2403内分别设置有与所述第三支撑轴2407相对应的第四支撑轴2408,第三支撑轴2407和所述第四支撑轴2408设置在所述第四滑槽2401内,从而能够通过所述伸缩压紧架24在所述第三支撑轴2407和第四支撑轴2408上滑动,当所述升降盘2404在上下的滑动过程中,能够通过所述第三支撑轴2407和第四支撑轴2408对所述伸缩压紧架24进行支撑,进而能够使伸缩压紧架24摆动,伸缩压紧架24卡接在所述平台凹槽1303的顶部后,通过所述伸缩压紧架24的摆动能够控制所述控制机体2的滑动,进而能够使控制机体2从平台凹槽1303脱离出来;同时通过第二私服电机2413的转动能够驱动所述第三拉绳轮2412转动,进而能够带动第三拉绳2411滑动,通过第三拉绳1411能够拉动所述伸缩压紧架24的收缩和伸展;在控制机体2的两端分别设置有一个个第一磁铁2113和一个第二磁铁2114,当多个控制机体2在一起后,通过第一磁铁2113和第二磁铁2114磁吸连接,通过无人机能够同时的运输多个控制机体2,进而大大的提高了对通信模块12进行检修。
[0056]
本发明的工作原理是:杆体1固定设置在固定底座1上,在杆体11上设置有一个升降滑动的升降平台13,在升降平台13上设置有一个伸缩滑动的伸缩轴1301,在伸缩轴1301的端部设置有一个伸缩的第一拉绳1302,当需要对通信模块12进行提升的过程中,能够通过第一拉绳1302的伸缩滑动带动通信模块12的升降,避免了通过人工提升通信模块12造成的麻烦,大大的提高了对通信模块12安装效率;在升降平台13上设置有一个平台凹槽1303,通过无人机运输控制机体2,将控制机体2输送到平台凹槽1303内,在控制机体2上设置有伸缩滑动的顶压滑块2103,通过顶压滑块2103滑出以后,能够使驱动转轮2104压紧在平台凹槽1303的倾斜端面上,进而能够筒驱动转轮2101的转动调整控制机体2的转动,从而能够使机体滑槽2001卡接在伸缩轴1301上;在机体滑槽2001的两侧分别设置有滑动的挤压滑块21,在挤压滑块21上分别设置有转
动的顶压轮2109,通过顶压轮2109压紧在伸缩轴1301上,通过顶压轮2109的转动进而能够带动控制机体2的滑动;当控制机体2滑动到伸缩轴1301的端部后,通过压紧模块22上设置的挤压滑块2202的摆动,能够将压紧轮2206压紧在所述拉绳驱动轮2207上,进而能够将控制机体2固定在第一拉绳1302上,同时通过拉绳驱动轮2207的转动能够带动控制机体2在第一拉绳1302上滑动;在控制机体2上设置有视频伸缩模块23,在视频伸缩模块23上设置有第二顶压气囊2303,通过第二顶压气囊2303充气和排气进而控制摄像头2302的伸缩滑动,当摄像头2302伸出以后,通过摄像头2302能够对通信模块12进行巡检;在控制机体2上设置有一圈同步摆动的伸缩压紧架24,当伸缩压紧架24伸出以后,伸缩压紧架24卡接在升降平台13的顶部,通过伸缩压紧架24的摆动能够进一步的对控制机体2的上下滑动进行控制,进而使控制机体2脱离所述平台凹槽1303,从而再通过无人机对控制机体2进行运输控制;在控制机体2的两端分别设置有一个第一磁铁3113和第二磁铁2114,当控制机体2叠加后通过第一磁铁2113和第二磁铁2114磁吸连接,进而能够使控制机体2连接在一起,便于通过无人机的输送,通过无人机能够将多个控制机体2输送到升降平台13上,进而对多个杆体1进行检修,大大的提高了检修的效率。
[0057]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1