一种含转角差估计的驻车挂档控制方法
1.本发明涉及纯电动汽车、增程式电动汽车以及并联和混联式混合动力汽车的换档控制技术领域,尤其涉及一种含转角差估计的驻车挂档控制方法。
背景技术:
2.电机和无同步器机械变速器直连系统取消了离合器和同步器,效率高、成本低,可有效降低电动汽车的综合成本,是一种理想的电驱动系统构型,近年来得到了业界的广泛关注,并在纯电动汽车和混合动力汽车中得到越来越多的应用。
3.电驱动机械变速器的控制主要可分为行车换档和驻车挂档两种情形。在驻车挂档时,若是新车初次挂档,则接合套与接合齿圈初始转角差不能确定;若车辆发生故障被拖动,同样会导致接合套与接合齿圈转角差不确定,从而无法确定驱动电机所需调整的角度,最终出现挂档过程严重打齿甚至无法成功换档的情形。为了解决这一难题,针对接合套与接合齿圈有倒角的电驱动机械变速器系统,本发明提出了一种含转角差估计的驻车挂档控制方法,以实现几乎零冲击驻车挂档。
技术实现要素:
4.本发明的目的是提出一种含转角差估计的驻车挂档控制方法,其特征在于,包括以下步骤:
5.步骤1:对换档电机采用bang
‑
bang控制以确保接合套到达接合位置时具有小轴向速度v
chm
;
6.步骤2:判断接合套位移s
slv
是否大于等于接合套到达接合位置的位移s
slv1
,若是,则转到步骤3;若否,则转到步骤1;
7.步骤3:判断接合套与接合齿圈的转角差是否发生变动,若是,则转到步骤4;若否,则转到步骤5;
8.步骤4:利用接合套与接合齿圈挤压时发生的周向转角差变动以及接合套当前的轴向位移估计接合套与接合齿圈的转角差再转到步骤6;
9.步骤5:判断是否同时满足接合套穿越倒角所需的时间t大于接合套穿越倒角所需的期望时间t
chm
,与接合套位移s
slv
小于等于接合套到达接合位置的位移s
slv1
,若是,则转到步骤6;若否,则转到步骤8;
10.步骤6:利用类bang
‑
bang四阶段控制来调节接合套与接合齿圈的转角差来进行转角对齐;再转到步骤7;
11.步骤7:判断是否同时满足接合套与接合齿圈的转速差δω
gr_slv
的绝对值小于等于转速差允许范围δω,与接合齿圈与接合套周期性转角差小于等于转角差允许范围δθ,若是,则转到步骤9;若否,则转到步骤6;
12.步骤8:判断接合套位移s
slv
是否大于等于接合套穿越倒角的位移s
chm
与接合套到达接合位置的位移s
slv1
的和,若是,则转到步骤9;若否,则转到步骤3;
13.步骤9:对换档电机采用bang
‑
bang控制使接合套与接合齿圈直接接合且确保接合套与接合齿圈不发生碰撞;再转到步骤10;
14.步骤10:判断是否同时满足接合套速度v
slv
小于等于接合套速度允许范围δv,与接合套位移s
slv
大于等于l/2
‑
δs,其中l为接合套从原始档位至目标档位的行程,δs为接合套位移允许范围;若是,则结束;若否,则转到步骤9。
15.所述小轴向速度v
chm
的确定方法如下:
[0016][0017]
式中,s
chm
为接合套穿越倒角所需的轴向位移,t
chm
为接合套穿越倒角所需的期望时间。
[0018]
所述步骤3中接合套处于上倒角位置时的转角差为:
[0019][0020]
式中,h
gr
为接合齿圈齿长,b
gr
为接合齿圈齿宽,α
gr
为接合齿圈倒角,n
gr
为接合齿圈的齿数;
[0021]
接合套处于下倒角位置时的转角差为:
[0022][0023]
所述步骤4中估计的接合套与接合齿圈的转角差为:
[0024][0025]
式中,δθ
gr_slv
=θ
gr
‑
θ
slv
,θ
gr
为接合齿圈的转角,θ
slv
为接合套的转角。
[0026]
所述步骤1和步骤9中的bang
‑
bang控制的控制律为
[0027][0028]
式中,为换档执行机构等效惯量,为换档执行机构等效阻尼,r
a
为换档执行机构等效半径,为换档电
机最大转矩,为接合套目标位移。
[0029]
所述步骤6中的类bang
‑
bang四阶段控制的控制律为
[0030][0031]
式中,为驱动电机目标转矩指令,为驱动电机最大转矩。
[0032]
本发明的有益效果在于:
[0033]
1、本发明驻车挂档控制方法含接合套与接合齿圈转角差估计,可以确定驻车状态时接合套与接合齿圈的转角差;
[0034]
2、本发明驻车挂档控制方法含接合套与接合齿圈周向“转角对齐”控制,可在接合套与接合齿圈接合前实现“零转速差、零转角差”;
[0035]
3、本发明驻车挂档控制方法可实现近乎零冲击挂档。
附图说明
[0036]
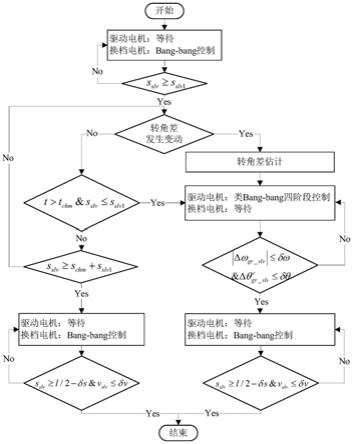
图1为含转角差估计的驻车挂档控制流程图;
[0037]
图2为接合套轴向位移与转角差关系示意图;
[0038]
图3为接合套与接合齿圈形位图;
[0039]
图4为转角差变动方向估计示意图;
[0040]
图5为含转角差估计的驻车挂档控制案例图。
具体实施方式
[0041]
本发明提出一种含转角差估计的驻车挂档控制方法,下面结合附图和具体实施例对本发明做进一步说明。
[0042]
图1为含转角差估计的驻车挂档控制流程图,包括以下步骤:
[0043]
步骤1:对换档电机采用bang
‑
bang控制以确保接合套到达接合位置时具有小轴向速度v
chm
;
[0044]
步骤2:判断接合套位移s
slv
是否大于等于接合套到达接合位置的位移s
slv1
,若是,则转到步骤3;若否,则转到步骤1;
[0045]
步骤3:判断接合套与接合齿圈的转角差是否发生变动,若是,则转到步骤4;若否,则转到步骤5;
[0046]
步骤4:利用接合套与接合齿圈挤压时发生的周向转角差变动以及接合套当前的轴向位移估计接合套与接合齿圈的转角差再转到步骤6;
[0047]
步骤5:判断是否同时满足接合套穿越倒角所需的时间t大于接合套穿越倒角所需的期望时间t
chm
,与接合套位移s
slv
小于等于接合套到达接合位置的位移s
slv1
,若是,则转到步骤6;若否,则转到步骤8;
[0048]
步骤6:利用类bang
‑
bang四阶段控制来调节接合套与接合齿圈的转角差来进行转角对齐;再转到步骤7;
[0049]
步骤7:判断是否同时满足接合套与接合齿圈的转速差δω
gr_slv
的绝对值小于等
于转速差允许范围δω,与接合齿圈与接合套周期性转角差小于等于转角差允许范围δθ,若是,则转到步骤9;若否,则转到步骤6;
[0050]
步骤8:判断接合套位移s
slv
是否大于等于接合套穿越倒角的位移s
chm
与接合套到达接合位置的位移s
slv1
的和,若是,则转到步骤9;若否,则转到步骤3;
[0051]
步骤9:对换档电机采用bang
‑
bang控制使接合套与接合齿圈直接接合且确保接合套与接合齿圈不发生碰撞;再转到步骤10;
[0052]
步骤10:判断是否同时满足接合套速度v
slv
小于等于接合套速度允许范围δv,与接合套位移s
slv
大于等于l/2
‑
δs,其中l为接合套从原始档位至目标档位的行程,δs为接合套位移允许范围;若是,则结束;若否,则转到步骤9。
[0053]
由于换档执行机构结构简单,为快速达到接合位置并具有小轴向速度,可利用简化后的线性系统得到的bang
‑
bang控制律控制换档电机实现上述目标。其中bang
‑
bang控制的控制律为
[0054][0055]
式中,为换档执行机构等效惯量,为换档执行机构等效阻尼,r
a
为换档执行机构等效半径,为换档电机最大转矩,为接合套目标位移。
[0056]
小轴向速度的具体值可根据接合套穿越倒角所需的轴向位移和期望的时间确定。例如穿越倒角所需位移为s
chm
,期望时间为t
chm
,则小轴向速度为:
[0057][0058]
若接合套与接合齿圈转角差发生变动,则利用接合套与接合齿圈挤压时发生的周向转角差变动以及接合套当前的轴向位移估计接合套与接合齿圈转角差;若接合套已越过接合齿圈倒角,则通过对换档电机的控制实现接合套与接合齿圈的接合;若经过时间t
chm
后,接合套仍处于接合位置,则接合套与接合齿圈齿尖相抵,转角差为π/n
gr
,则通过控制驱动电机转矩实现接合套与接合齿圈“转角对齐”;
[0059]
若接合套与接合齿圈之间存在转角差,则接合套在以小轴向速度运动时会与接合齿圈发生碰撞。如图2所示,当接合套与接合齿圈在倒角上相抵时,可根据接合套的位移s
slv
,确定接合套与接合齿圈相抵的位置处于上倒角位置
①
或下倒角位置
②
,即同一接合套轴向位移对应两个可能的转角差。若接合套处于
①
位置,则转角差为:
[0060][0061]
式中,为接合套与接合齿圈转角差,n
gr
为接合齿圈的齿数。其他符号可见图3,h
gr
为接合齿圈齿长,b
gr
为接合齿圈齿宽,α
gr
为接合齿圈倒角,s
slv
表示以空档位置为零
点,接合套的轴向位移,s
slv1
表示从接合套从空档位置至接合位置的位移。l为接合套从原始档位至目标档位的行程。
[0062]
若处于
②
位置,则转角差为:
[0063][0064]
可依据转角差变动的方向确定到底为
①
位置还是
②
位置,如图4所示。设转角差变动量为δθ
gr_slv
=θ
gr
‑
θ
slv
,θ
gr
和θ
slv
分别为接合齿圈和接合套的转角,则估计的接合套与接合齿圈的转角差为:
[0065][0066]
当通过上述估计方法获得接合套与接合齿圈转角差后,可根据该转角差控制驱动电机转矩实现接合套与接合齿圈“转角对齐”。例如,为实现快速“转角对齐”,驱动电机可以利用类bang
‑
bang四阶段控制调节接合套与接合齿圈转角差,其控制律为
[0067][0068]
式中,为驱动电机目标转矩指令,为驱动电机最大转矩。
[0069]
当接合套与接合齿圈“转角对齐”后,可控制换档电机使接合套与接合齿圈直接接合且不发生接合套与接合齿圈的碰撞,保证换档成功。例如,为保证时间最短接合套与接合齿圈“转角对齐”控制,换档电机可利用bang
‑
bang控制使接合套以最短时间达到目标档位且速度为零,其控制结果如图5所示。
[0070]
此实施例仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1