用于在GNSS接收器中执行联合信道和时间估计的方法和装置与流程
用于在gnss接收器中执行联合信道和时间估计的方法和装置
技术领域
[0001]
本发明涉及全球导航卫星系统(gnss),并且特别地涉及用于在室内条件下使用的在gnss接收器中执行联合信道和时间估计。
背景技术:
[0002]
全球导航卫星系统(gnss)在广泛的应用中正在变得越来越重要,所述应用包括车内导航支持、针对智能电话的基于位置的服务等等。在wo 2006/063613和wo 2007/101454中描述了gnss的示例实现。这样的gnss包括通常二十至三十个卫星的星座,卫星中的每个传输结合了该卫星特有的已知扩频码(比特或码片的预定伪随机噪声序列)的导航信号。类似于常规的cdma(码分多址)系统,接收器将接收到的信号与针对各种卫星的扩展码互相关,以获取针对当前可见(在地平线上方)的相应卫星的导航信号。针对卫星的导航信号还将卫星的位置和传输的时间编码到高精度。
[0003]
为了进行位置确定,接收器定位给定卫星的获取的导航信号和被保存在接收器内或在接收器内内部地生成的针对该卫星的扩频码的版本之间的互相关函数的最大值。互相关函数的最大值对应于接收的扩频码和内部扩频码之间的码相位对准(零偏移),并且取决于(i)从卫星到接收器的信号行进时间,该时间取决于卫星的空间位置和接收器的空间位置,以及(ii)卫星和接收器之间的任何定时(时钟)偏差(偏移)。通过从多个卫星获取码相位信息,解决接收器的(通常)未知空间位置和时钟偏差是可能的。
[0004]
任何这样的位置确定的精度取决于基于互相关函数可以多精确地确定码相位对准。大多数传统gnss导航信号在它们的自相关函数中呈现单个最大值,该自相关函数在零码相位偏移附近遵循已知的三角形形状。此外,新的gnss信号利用二进制偏移载波(boc)来调制传输的导航信号。这具有使自相关函数的主峰变窄以支持更精确的位置的估计的效果,尽管以在自相关函数中出现新的相关峰为代价,从而在码相位估计中引入了歧义(ambiguity)。
[0005]
用于跟踪码相位的典型方法是针对三个不同的延迟(称为早期、即刻(prompt)和晚期)计算互相关函数,其中即刻表示预期的延迟(例如,如根据信号获取确定)。然后可以通过将预期的相关峰拟合到针对这三个不同延迟的相关值来确定码相位对准。ep 3104195中提供了关于boc调制和拟合相关峰的另外的细节。
[0006]
如上面提到的那样,获得来自多个卫星的针对信号的码相位对准允许确定接收器的未知空间位置和时钟偏差。虽然gnss信号主要与以前的方面(位置确定——因此导航的参考)相关联,但在后面的方面中也有意义(interest)。因此,确定接收器的时钟偏差允许参考整个gnss内保持的非常精确的时间在接收器处获得非常精确的时间。
[0007]
因此,gnss信号在许多不同应用中被用于时间同步目的,所述应用包括电信、金融和能源部门[1]。通常,gnss信号的利用通常限于室外应用(其中不存在gnss覆盖问题),而在室内条件下使用gnss信号是更具挑战性的[2]-[4]。例如,在室内环境中,接收器可能或可能未接收来自卫星的直接视线(los)信号,并且也可能接收显著的多径分量,即非视线
(nlos)分量。因为nlos分量由于额外的行进距离而相对于los分量具有系统延迟,所以这可能在延迟(以及因此定时)估计中引入潜在的偏差。
[0008]
在电信应用的特殊情况下,由电信服务提供商在宏蜂窝小区中采用gnss同步,而其他同步技术,诸如基于有线的解决方案,比如精确时间协议,正在被考虑用于室内小型蜂窝小区,以实现亚微秒范围内的定时精度(取决于特定的网络拓扑和其他要求)。
[0009]
预期精确的室内时间同步对未来的5g电信网络是重要的,在未来的5g电信网络中,室内小型蜂窝小区可以被用于填充(populate)室内区域以提供5g服务。对于这样的新的5g信号的传输,将需要不同蜂窝小区之间的严格同步要求,为50纳秒的数量级或以下[5]。此外,精确的时间同步还可以潜在地被用于基于从5g信号导出的测距测量来提供精确的定位。
[0010]
虽然gnss信号仍然可以在轻微的(mild)室内条件下被用于定位和定时应用,但由于深度衰落和来自非视线(nlos)分量的强多径的影响,这是以降级的性能为代价。在定时应用的特定情况下,大众市场定时接收器(例如,参见[6])即使在只跟踪一个gnss信号的情况下(如果接收器的位置是先验已知的),也能够以500纳秒(1-σ)的数量级的预期精度操作[6]。然而,该精度仍然显著低于上面描述的提议的5g服务所需的水平。
[0011]
最近,基于铱星的低地球轨道(leo)星座的新的商业定时服务已经变得可用,以在室内条件下提供精确的定时(和定位)[7]、[8]。对于该服务,由运营商声称100纳秒(1-σ)的定时精度,虽然仍不匹配但更接近于针对电信应用的上面提到的严格要求。
技术实现要素:
[0012]
本发明在所附权利要求中限定。
[0013]
提供了一种用于与包括多个卫星的全球导航卫星系统(gnss)一起使用的接收器。每个卫星传输包含扩频码的相应导航信号。gnss保持被编码到导航信号中的时间参考。接收器包括:接收器时钟;以及至少一个天线,所述天线用于在多个相应信道上接收多个信号,每个信道由传输卫星和在所述信道的相对端处的接收天线限定。接收器进一步包括至少一个相关器,所述相关器用于计算(i)在多个信道上接收的信号与(ii)由接收器提供的导航信号的参考版本之间的互相关函数。接收器被配置成使用计算的互相关函数来执行以下各项的联合估计:(i)接收器时钟相对于由gnss保持的时间参考的时钟偏差,以及(ii)包括作为时间延迟的函数的多个信道的组合贡献的复合信道。
[0014]
这样的接收器支持在室内条件下将gnss信号使用用于精细时间同步,从而有助于减轻这种类型的情况下的强衰落和nlos多径条件。本文中描述的方法寻求在室内条件下提供鲁棒且精确的时间同步,而不需要提供任何附加基础设施(例如,有线网络和/或单个gnss接收器以外的其他装置)。
附图说明
[0015]
现在将参考以下附图,仅通过示例的方式详细描述本发明的各种实现:图1是用于接收gnss导航信号的接收器的示意图。
[0016]
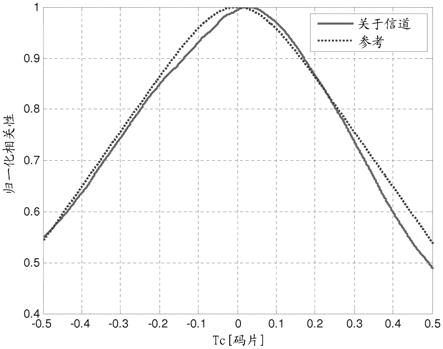
图2是示出对于给定的天线和卫星由室内传播信道引入到相关函数中的失真的示例的绘图。
[0017]
图3是示出针对不同天线和给定卫星由室内传播信道引入相关函数中的失真的示例的绘图。
[0018]
图4示出了针对模拟室内条件的功率延迟曲线(profile)的示例。
[0019]
图4a和4b示出了来自图4的数据的子集,每个示出了针对单个相应卫星的功率延迟曲线。
具体实施方式
[0020]
图1是适用于与gnss一起使用以便从相应卫星接收导航信号的接收器701的高级示意性框图。接收器701可以被提供为独立单元,或者可以被结合到一些更大的设备中,所述更大的设备例如移动(蜂窝)电话、蜂窝无线电接入节点(例如5g小型蜂窝小区)、计算机、汽车或其他形式的交通工具、医院病床、航空器或轮船、货运集装箱等等。在操作中,接收器701包括用于接收gnss信号的至少一个天线715。天线715链接到rf调节、下变频(down-conversion)和a/d转换单元720,该单元720又将接收到的信号的基带复包络传递到信道获取和跟踪单元725。
[0021]
接收器701还包括码生成器712,该码生成器712可以生成(或存储)用于卫星星座的扩展码(伪随机噪声序列)。由码生成器712为信道获取和跟踪单元725提供相关的扩展码,使得可以从接收信号的基带复包络获取(一个或多个)传入(incoming)信道。信道获取单元725利用适当数量的扩频码来在适当时(as appropriate)(即,根据接收器信道的数量)支持信道获取单元的顺序或并行操作。在图示的实施例中,信道获取和跟踪单元725包括r个相关器728。
[0022]
接收器701被配置成执行(i)时钟偏差和(ii)复合信道的联合估计,如下面更详细描述的那样。该处理可以被整合到信道获取单元725中,或者可以在接收器701(图1中未示出)内的分离单元中执行,例如在处理器、数字信号处理器(dsp)或任何其他合适的组件中执行。
[0023]
一些导航系统可能包括本地元素(有时称为伪卫星)。这些是例如在机场处的本地定位系统,其可以补充来自卫星导航系统的定位信号以提供附加的位置信息。将理解的是,如本文中描述的接收器701旨在接收和处理任何合适的导航信号(无论是来自卫星、伪卫星还是来自任何其他相关源),并相应地执行联合估计处理。
[0024]
图2是示出针对给定天线和卫星由室内传播信道引入到相关函数中的失真的示例的绘图(如借助[9]、[10]中的信道模型获得)。参考相关函数(虚线)被包括以进行比较,并且具有与零对准的峰。由于(延迟的)nlos分量的存在,观察到的相关函数(实线)失真并稍微延迟(向右移位),所述分量也参与相关函数中,并且因此使结果产生了偏差(相比之下,参考相关函数可以被认为是通过仅接收los分量将产生的相关函数)。特别注意,图2中的针对室内信道的失真相关函数的最大值相对于参考相关函数有偏差(延迟),这然后将把偏差引入到任何位置和/或定时估计中。
[0025]
图3是示出针对不同天线和给定卫星由室内传播信道引入相关函数中的失真的示例的绘图(同样如借助[9]、[10]中的信道模型获得)。注意,相关函数被归一化,使得具有最高相关性的天线具有单位值。(不同的天线通常具有不同的位置和取向,并且因此彼此经历稍微不同的信道)。可以看出,就相关函数的明确定义的峰而言,具有最强相关值的天线也
具有最好形状。相比之下,针对其他天线的相关函数通常有些失真,具有较低和较不明确定义的峰(由于来自nlos分量的失真和los分量的至少部分损耗)。因此,直接基于这些失真的相关函数的任何位置和/或定时估计容易受到偏差或误差的影响。
[0026]
本文中描述的方法有助于克服诸如图2和图3中图示的偏差/失真。我们考虑如下接收器,该接收器具有n个天线的阵列(其中n≥1),并且从给定的gnss星座(或任何其他基于卫星的导航系统)接收m个导航信号(其中m≥1,全部具有等效的相关属性并在相同的频带内传输)。从m个卫星接收到的信号被认为受到室内传播信道的影响。基于该定义的多输入多输出(mimo)系统,并考虑包括mimo系统的m
×
n个传播信道的组合贡献的复合信道,提供了一种用于基于接收到的卫星导航信号来联合估计复合信道和时间同步(在接收器时钟和gnss的时间参考之间)的方法。
[0027]
以下各条信息被认为是已知先验的:a)天线中的每个与接收器的相位中心之间的基线(相位偏移)。
[0028]
b)接收器的位置;c)接收器的粗略时钟偏差;关于(a),这是接收器本身的属性,并且可以使用已知的测量装备来确定。关于(b)和(c),可以使用诸如在现有gnss接收器中实现的常规技术来估计这些。例如,在执行本文中所描述的附加处理之前,接收器可以首先执行导航信号的常规获取以获得该位置和定时(时钟偏差)信息。替代地(或附加地),可以从其他源知道位置和/或定时信息——例如,接收器可能位于其位置是已经已知的建筑物中,例如,从测绘信息(mapping information)知道,同样,定时信息可以是从外部源(诸如电信网络或类似物)可获得的。
[0029]
复合信道被定义为m
×
n个传播信道——对应于m个卫星信号的n个接收版本(每个天线一个)——的聚合(aggregate)贡献——作为相对于los信号的时间延迟的函数(即使这样的los信号对于接收器可能是不可见的)。复合信道给出了所得到的聚合mimo信道的功率延迟曲线的度量——即作为时间延迟的函数的所有接收信号贡献的总聚合功率。基于复合信道的估计,还可以导出接收器的时钟偏差的估计——即,执行联合估计过程。
[0030]
通常,复合信道的系数中的每个(每个时间延迟一个系数,每个系数反映针对该时间延迟通过信道的功率传输的水平)将遵循概率密度函数(pdf),这是先验未知的,并且高度取决于接收器环境的传播条件。如下面所描述的那样,复合信道的估计作为多假设估计问题来执行,其中,针对复合信道的每个系数评估不同的pdf假设。
[0031]
复合信道的估计基于复合互相关函数,复合互相关函数取决于时钟偏差。因此,在不同的离散时钟偏差值下对复合互相关函数的估计是有意义的。实际上,复合互相关函数还取决于其他参数,比如时钟漂移以及接收器相对于n个天线的相位中心位置(除了其他之外)。
[0032]
因此,其中接收器的状态
向量并且子索引0是指天线的阵列的相位中心(即接收器的相位中心位置)。针对接收器的状态向量的复合互相关函数根据[11]被导出为:(等式1)其中以下定义适用:a)等效于每个天线的状态向量。注意,其中为接收器的相位中心和第j个天线之间的向量。实际上:,b) 是对应于在复合信道估计中考虑的整合时段的针对第j个天线的k个样本的快照(以采样周期)(x
j
因此表示在相应天线j处的接收信号),c)是针对状态向量的基函数矩阵,其由针对第j个天线的每个卫星的基函数向量组成,d)针对第i个卫星和第j个天线的基函数在时刻t被定义为,其中为由第i个卫星传输的信号的复基带模型。
[0033]
(下面的附录a提供了等式(1)的导出)。
[0034]
如上面指出的那样,可以使用例如如在当前接收器中实现的任何合适的现有技术来估计粗略时钟偏差。为了帮助降低联合复合信道和时间估计过程的计算复杂度,可以进一步降低在室内条件下通过现有技术(state-of-the-art)通常获得的时钟偏差误差(通常具有数百ns的数量级),以帮助约束联合估计问题中的搜索空间。例如,可以执行中间时钟偏差估计,以通过利用复合互相关函数来改善(refine)初始粗略估计。然后,中间时钟偏差估计可以被导出为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(等式2)其中α是取决于当前历元(epoch)/整合时段时的粗略时钟偏差估计的质量的阈值。
[0035]
每个天线处的接收信号可以被视为多个分离分量的总和,每个分量对应于所传输
的导航信号,但受到相对延迟和幅度中的变化的影响。在这方面中,我们可以将视线(los)视为具有零延迟,并且将所有其他分量视为具有正延迟。在一些情况下,los分量可能是不可见的。
[0036]
为了形式化这一点,我们定义复合信道向量,其包含针对感兴趣的d个离散时间延迟的复合信道的系数(均匀分布覆盖扩展信道延迟),使得是复合信道向量的第m个系数;对应于los贡献的系数h1标记接收器的实际时钟偏差,即相对于gnss的时间参考,(实际时钟偏差将通过本文中描述的过程来估计)。因此,实际上,对于给定的分量h
m
,m的值指定时间延迟(相对于los分量),而h
m
的值确定具有时间延迟m的分量的幅度(或强度的其他度量)。
[0037]
复合信道的分量的系数被认为遵循任意一组pdf ,其中为针对第l个假设和第m个系数采用的pdf,并且其中针对pdf总共n
l
个假设后跟每个系数。我们将基于中间时钟偏差和(正或负)整数偏移(待估计)的精细时钟偏差估计量定义为,其中是复合信道向量的时间延迟分辨率。基于此,针对第l个假设的h和β的联合估计量可以被定义为约束优化问题的解决方案,根据等式(3): (等式3)其中以下定义适用:a.是在针对信道pdf 的第l个假设下估计的复合信道向量,其中,b.是在第l个假设下估计的整数偏移,c.基于中间时钟偏差的预期误差来约束针对整数偏移β估计的值(总共个估计的值),d.是针对mimo系统的估计复合互相关向量,其在q个时钟偏移值处对复合互相关函数均匀地采样(以时间延迟分辨率),以中间时钟偏差估计为中心,使得,e.是包含以时钟偏差为中心的参考相关函数(对于正在考虑的gnss信号)的样本的向量。
[0038]
注意,正是β的值最终对参考gnss中的时间来定义接收器处的时间是有意义的。
[0039]
在高级项(term)中,等式(3)定义了(i)观察信号值(根据上面的(d)由表示)和(ii)针对该假设的预测值之间的平方差之和,该预测值是基于如下各项来确定的:(a)上面的原始导航信号(根据(e)由s表示),(b)根据上面的(a),根据预测的信道,针对在每个天线处接收到的信号的假设的反射的模式,以及假设的接收器时钟的时间偏移,该时间偏移根据上面的(b)由表示。和的假设值与接收到的数据匹配得越好,平方差之和就越小。
[0040]
优化受到两个条件的影响。首先,定义了针对的值的有限范围(
±
w),这减小了关于中间时钟偏差的搜索空间。注意,这主要是计算问题——借助更多可用的计算资源,可以针对探索更宽的搜索范围,在一些情况下,到达可以使用粗略时钟偏差来执行搜索而不必首先导出中间时钟偏差的程度。其次,的值受到概率密度函数的约束,该概率密度函数由表示,如下面更详细地讨论的那样。考虑的一种方式是作为规则化(regularization)的形式,这确保不同的的值在物理上是合理的(而不是允许任何任意的的值);这也有助于降低过度拟合(over-fitting)的风险。
[0041]
可以例如使用蒙特卡罗方法来解决等式(3)中提出的优化问题,由此复合信道向量h的系数被视为从相应的任意pdf 提取的随机变量(其中针对每个假设中的每个系数评估个蒙特卡罗运行)。实际上,系数的实际分布很大程度上取决于室内信道传播条件。因此,估计针对复合信道的系数的多个pdf假设,并且遵循该方法,估计的复合信道向量是n
l
个估计的信道向量中的一个,其导致(i)估计的复合互相关和(ii)基于被评估的复合信道向量的参考模型之间的最小均方误差。
[0042]
如下面提出的那样,算法1总结了在针对复合信道的系数中的每个考虑n
l
个pdf假设和n
c
个蒙特卡罗运行时基于等式(3)的复合信道和精细时钟偏差估计(即,和)。
[0043]
如下面提出的那样,针对其中n=1(由接收器使用单个天线)和n
l
=1(在估计过程中考虑针对每个系数的单个假设)的特定情况下,算法1a总结了基于等式(3)的复合信道和精细时钟偏差估计,使得是针对第m个系数的pdf,是接收器的天线的状态向量,并且x1是由接收器的天线收集(gather)的k个样本的快照。
[0044]
通常,pdf 可以被设置为任何期望的分布。一个选项是定义一组默认pdf,所述pdf表示从轻室内(light-indoor)到深室内(deep-indoor)条件的不同类型的环境,如从理论模型、光线跟踪模型和/或从针对那些环境的真实数据——例如,使用表示室内条件的数据库导出的那样。对于静态接收器,另一种可能性是基于先前可用历元的估计系数来估计针对复合信道的d系数的pdf ——即,基于到目前为止估计的系数来构建或改善pdf。对于足够长的时间段(例如若干天),使得遇到gnss卫星和接收器天线之间的所有可能的几何形状,得到的应针对接收器被定位在其中的室内条件来表征接收器的传播条件。在这种情况下,可以被视为围绕接收器的环境的标志(signature)。可以针对每个历元以顺序(迭代)的方式执行这样的估计,从而更新先前历元的估计的pdf 以提供针对当前历元的新的复合信道向量估计。
[0045]
在替代方法中,通过利用天线之间的nlos多径分量的空间相关性来定义h和β的联合估计量。换句话说,由不同天线(位于稍微不同的位置中)“看到”的nlos分量可能具有某种程度的互相关性。该相关性的程度取决于天线之间的距离和室内传播条件。
[0046]
联合估计量可以被定义为用于约束优化问题的解决方案
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(等式4)其中以下定义适用:a),其中是与多径错误建模误差的空间协方差矩阵相关联的第j个特征值,其被估计为,b)是包含具有针对每个天线的估计的多径错误建模误差的向量的矩阵,其被定义为:,(等式5),其中,c)是针对第j个天线的估计复合互相关向量,其在q个时钟偏移值处对复合互相关函数均匀地采样(具有时间延迟分辨率),以中间时钟偏差估计为中心,使得,d)被估计为: (等式6)。
[0047]
算法2总结了在针对复合信道的系数中的每个考虑n
l
个pdf假设和n
c
个蒙特卡罗运行时基于等式(4)的替代复合信道和精细时钟偏差估计。
[0048]
注意,算法2中的输入和输出与针对算法1的输入和输出相同。因此,算法2可以被视为用于执行与算法1中执行的相同的整体分析的替代方法。此外,本领域技术人员将理解,这些方法通过示例的方式来提供,并且根据任何给定实现的情况,可以采用其他方法。例如,不是使用蒙特卡罗方法,而是可以跨覆盖定义和的可能的(预期)值的空间的预定网格执行系统搜索。此外,不是执行蒙特卡罗或网格搜索,而是一些实现可能使用优化(反馈)方案,该方案寻求收敛于针对等式(3)的某个最小值上(类似于爬山例程(hill-climbing routine),仅寻求最小值而不是最大值)。在所有情况下,将理解,找到最小配置通常将意味着找到近似最小值(而不是绝对最小值),例如,由于所执行的分析中的限制(诸如,在等式(3)中仅考虑的n
w
值)。
[0049]
通过考虑来自[9]、[10]的实际室内传播信道和具有四个天线的线性阵列(它们中的每个之间具有10 cm的间隔)的接收器,本文中描述的方法已经经由以后相关级别的半分析方法使用算法1的实现来模拟。在模拟中,n
l
=3(即,考虑了关于复合信道系数中的每个的
pdf的三个假设),并且n
c
=10。在模型中考虑了针对每个天线接收到的信号之间的空间相关性。作为参考,使用基于来自阵列的天线之一的接收到的信号获得的定时解决方案和常规的基于加权最小二乘(wls)的解决方案。在两种情况下,都考虑单个整合时段。
[0050]
图4示出了针对模拟室内条件的功率延迟曲线的示例(基于[9]的信道模型),其针对所有卫星具有超过20 db的衰减和重要的nlos分量。特别地,图4示出了针对一组11个可见卫星(sv1、sv2、
…ꢀ
sv11)的模拟结果,其中针对每个卫星的结果用具有针对该相应卫星的特定形状/颜色的符号来绘制。图4a和图4b示出了来自图4的数据的子集,其中图4a示出了针对一个卫星(表示为sv2)的结果,并且图4b示出了针对另一个卫星(表示为sv8)的结果。
[0051]
对于给定卫星,具有特定形状/颜色的每个符号表示来自该卫星的信号分量。可以看出,由单个导航信号(即,来自一个卫星)产生的信号分量的数量是相对高的——通常多于10或20,通常在30-120的范围内,例如50-100,但是仍可能更高。每个信号分量基于以下各项来绘制:i)x轴——相对于理想los分量的以纳秒为单位的针对该分量的延迟。通过换算(scaling)的方式,10纳秒的延迟对应于大约3米的附加行进距离。
[0052]
ii)y轴——归一化功率(db),其中这里归一化指示针对每个卫星的总接收功率(跨所有分量)被设置为一致的水平(即,针对所有卫星相同)。
[0053]
注意,在从不同卫星接收到的信号分量中存在相当大的变化,例如,针对卫星sv8的图4b示出了比针对卫星sv2的图4a显著更多的具有更高延迟(>100 ns)的分量。此外,将理解,(大约50 ns的)延迟估计中的期望精度显著小于一些nlos分量的延迟(即使对于卫星sv2,)。
[0054]
表1中总结了模拟结果,表1示出了基于wls的参考方法和本文中所描述的方法的定时误差(rms和95百分位),具体采用算法1(注意,在模拟中不考虑附加校准和卫星系统相关误差)。特别地,这些图涉及与确定相关联的定时误差,为与由gnss所保持的时间参考相比的接收器的时钟偏差。所获得的结果示出,与常规的时间估计方法相比,用本文中描述的方法执行的时钟偏差的时间估计中的明显的改善。通过本文中描述的更好地利用nlos信号的方法(减轻时钟偏差估计中引入的偏差)以及通过利用由具有多个天线的阵列引入的信号分集来实现该改进(尽管即使仅单个天线是可用的,本文中描述的方法也可以使用,诸如通过利用如上面所呈现的算法1a)。
[0055]
表1.结果的概要
[0056]
尽管本文中描述的方法比常规的定时架构具有更高的计算复杂度,但是它非常适于并行实现,以便减少计算负担。此外,利用针对静态接收器的室内信道的相对慢的去相关(decorrelation)(通常为若干秒的数量级),复合信道的计算可以在更长的时段内执行。
[0057]
本文中描述的方法允许卫星导航信号(包括但不限于当前的gnss)在室内条件下帮助实现低于约50 ns(1-σ)的定时精度。这样的定时精度可能有助于支持在室内定时应用中使用当前的gnss信号(而不必依赖于其他商业服务),诸如上面提到的提议的5g网络操作。在本文中所描述的方法中,提供了联合复合信道和时间估计方法,以解决低载波噪声(c/no)条件和通常在这样的室内环境中经历的nlos多径分量的高影响。如上面描述的那样,已经经由考虑实际室内传播信道的软件模拟评估了该方法,并且相对于常规的时间估计方法,该方法示出了得到的时间同步性能的明显的改善。
[0058]
尽管本文中描述的方法主要旨在对于室内接收gnss信号的情况,允许精确确定接收器时钟的定时偏移,但是它也可以更一般地用于确定接收信号的多径分量(诸如图4中所示)。该方法可以被用于帮助从互相关函数去除偏差(失真),由此提供室内环境中的接收器的位置(代替时钟偏移或以及时钟偏移)的更精确的估计。此外,该方法可以被用于获得关于室内环境的信息。例如,如果观察到的多径分量改变,这可以指示环境内的条件中的一些变化(诸如门打开或关闭),并且因此可以被用于例如一些形式的监视系统。
[0059]
尽管本文中所描述的方法主要旨在用于与现有或未来的gnss(诸如gps和galileo)一起使用,但是术语gnss应该被理解为包括提供合适的卫星(或伪卫星)信号用于执行本文中所描述的方法的任何系统,即使这样的信号不一定提供用于导航目的(或至少这不是它们的主要目的)。例如,与之一起使用的卫星信号可能主要旨在用于时间同步和/或用于电信(而不是用于位置定位)。
[0060]
本文中描述的方法提供了一种用于与包括多个卫星的全球导航卫星系统(gnss)一起使用的接收器。每个卫星传输包含扩展码的相应导航信号。gnss保持时间参考,该时间参考被编码到导航信号中。该接收器包括接收器时钟和用于通过多个相应的信道接收多个信号的至少一个天线,每个信道由在信道的相对端处的传输卫星和接收天线限定。接收器进一步包括用于计算(i)通过多个信道接收的信号和(ii)由接收器提供的导航信号的参考版本之间的互相关函数的至少一个相关器。接收器被配置成使用计算的互相关函数来执行以下各项的联合估计:(i)接收器时钟相对于由gnss保持的时间参考的时钟偏差以及(ii)包括作为时间延迟的函数的多个信道的组合贡献的复合信道。
[0061]
通过相应信道接收的信号通常包括来自多个导航信号的贡献;这些贡献通常低于噪声水平,但可以通过针对不同导航信号与已知码互相关来辨别。每个互相关函数通常基于(i)对应的接收信号(对于给定的信道)和(ii)对应的导航信号(对于给定的卫星)来计算。接收器通常将仅检测导航信号的子集——其余部分可能对应于例如地平线以下的卫星。(在一些情况下,接收器可能具有可用的历书(almanac)信息,并且预先知道哪些卫星当前在地平线以下)例如,由于一个或多个其他信道上的强衰减或衰落,可能在信道的子集上仅检测到给定的导航信号,这也是可能的。如果针对对应信道和卫星的给定互相关函数没有定位导航信号(即,没有找到相关峰),则可以从联合估计减去(discount)该互相关函数。
[0062]
通常,接收器被配置成使用在给定信道上接收的信号和给定导航信号的参考版本之间的计算的互相关函数来确定接收的导航信号和该导航信号的参考版本之间的码相位对准。该码相位对准取决于:(i)从卫星到接收器的给定导航信号的传播时间,以及(ii)接收器时钟和由gnss保持的时间参考之间的时钟偏差。对于已知位置的接收器,可以确定传播时间,由此将时钟偏差暴露给测量。
[0063]
本文中描述的接收器非常适用于在室内条件下使用,该条件通常遭受(i)衰落或有时完全不存在直接(视线)分量,和(ii)通常存在多个非视线分量。联合估计利用在所有信道上接收的信息(包括来自多径分量的信息),以帮助获得比利用现有技术通常可以实现的更高的时钟偏差的精度。
[0064]
在一些实现中,接收器时钟的时钟偏差被估计为与近似时钟偏差的偏移。近似时钟偏差可以从常规技术导出,并且具有大于本文中提供的时钟偏差的期望精度的不确定性。例如,近似时钟偏差可以具有在0.1-1微秒的范围内、或在0.2-0.8微秒的范围内、或在0.25-0.6微秒的范围内的典型精度(1-σ)。在一些实现中,接收器可以被配置成在执行联合估计之前,通过使用计算的互相关函数来确定针对复合信道的复合互相关函数的最大值,来估计近似时钟偏差。(该后面的方法通常将提供比常规技术更精确的针对近似时钟偏差的初步估计,并且因此减少了针对联合估计的搜索空间,如下描描述的那样)。
[0065]
复合信道可以表示多输入多输出(mimo)信道,其中多个输入对应于各种卫星,并且多个输出对应于不同的天线。然而,在一些情况下,接收器可能只有单个天线,在这种情况下,只有单个输出。注意,在其中有多个天线(即,mimo信道)的情况下,联合估计可以利用由不同天线接收的信号之间的空间相关性来增强联合估计的精度。
[0066]
时钟偏差和复合信道的联合估计可以被认为是优化问题,即找到将最接近地再现计算的互相关函数的时钟偏差和复合信道。该优化可以使用任何合适的搜索技术来执行,所述搜索技术例如网格搜索、迭代技术(诸如爬山)等等。对于时钟偏差,可以在以计算的互相关函数的整体码相位对准为中心(至少近似)的窗口内、或者通过使用任何其他合适的方法来执行搜索。如上面指出的那样,具有针对时钟偏差的先验已知估计减小了搜索空间,先验已知估计越精确,搜索空间可能越小。
[0067]
复合信道表示更复杂的参数空间。例如,复合信道可以由一组系数来指定,每个系数对应于特定的时间延迟,并且表示针对该时间延迟通过复合信道的聚合功率传输的水平(例如,作为接收到信道中的总功率的一部分)。在一些实现中,接收器包括针对该组系数中的每个系数的至少一个概率分布函数,并且该概率分布函数被用于生成针对系数的试验值(trial value)。在一些情况下,搜索空间可以包含使用针对系数的多个不同的概率分布函数。存在用于定义或提供这样的概率分布函数的各种方式。例如,可以从典型室内传播信道的模拟确定概率分布函数,诸如图4、4a和4b中所示。另一种可能性是,所提供的概率分布函数基于使用来自先前历元的接收信号(如果可用)获得的复合信道的估计。例如,测量的第一历元可以使用从模拟获得的概率分布函数,然而,后续历元可以使用从较早历元确定的概率分布函数。在一些情况下,接收器可以被配置成在复合信道的每个新的联合估计变得可用之后更新现有的概率分布函数,因此允许对针对系数使用的概率分布函数的连续和不间断的(迭代)增强。
[0068]
本文中还提供了一种操作用于与包括多个卫星的全球导航卫星系统(gnss)一起使用的接收器的方法,其中每个卫星传输包含扩展码的相应导航信号,并且其中gnss保持时间参考,该时间参考被编码到导航信号中。该接收器包括接收器时钟和用于通过多个相应的信道接收多个信号的至少一个天线,每个信道由在信道的相对端处的传输卫星和接收天线限定。该方法包括计算(i)通过多个信道接收的信号和(ii)由接收器提供的导航信号的参考版本之间的互相关函数;以及使用所计算的互相关函数,执行(i)接收器时钟相对于
由gnss保持的时间参考的时钟偏差以及(ii)包括作为时间延迟的函数的多个信道的组合贡献的复合信道的联合估计。该方法特别适用于在室内环境中使用,室内环境通常受到多径(非视线)分量和/或直接(视线)分量的衰落的影响。该方法通常可以受益于上面讨论的相同的功能和增强。
[0069]
本文中描述的方法可以被实现为一些形式的接收器,无论是作为独立的接收器提供还是结合到一些其他类型的设备——例如,移动电话、蜂窝无线电接入节点(例如,5g小型蜂窝小区)、平板、交通工具gps(汽车、飞机、轮船、自行车等)、照相机或任何其他适当的位置监视/跟踪系统中。接收器可以至少部分地通过在一个或多个处理器(诸如dsp、gpu等)上执行程序指令来实现这样的方法,和/或接收器可以至少部分地通过利用专用硬件——例如,一个或多个专门设计以支持该方法的芯片,例如,通过提供多个硬件相关器等,来实现这样的方法。还可以提供计算机程序来实现本文中描述的方法。这样的计算机程序通常包括计算机程序指令,该计算机程序指令可以在非暂时性计算机可读存储介质(诸如光盘(cd或dvd)、硬盘或闪存)上提供。计算机程序可以从这样的存储介质被加载到计算机存储器中,或者可以通过网络(诸如因特网)被下载到计算机存储器中。加载计算机程序的装置(例如接收器)可以包括用于执行计算机程序的一个或多个处理器,该计算机程序包括使装置实现诸如上面描述的方法的指令。
[0070]
***总之,本文中已经描述了多种实现,但是这些仅通过示例的方式来提供,并且对这样的实现的许多变化和修改对于本领域技术人员来说将是显而易见的,并且落入由所附权利要求及其等同物限定的本发明的范围内。
[0071]
参考文献[1]
ꢀ“
gnss market report”,2017年第5期(issn 2443-5236),欧洲gnss机构(gsa)。
[0072]
[2] g. seco-granados、j.a. lopez-salcedo、d. jimenez-banos、g. lopez-risueno,“challenges in indoor global navigation satellite systems: unveiling its core features in signal processing”,ieee signal processing杂志,第29卷,第2期,第108-131页,2012年。
[0073]
[3] g. hein和a. teuber,“gnss indoors. fighting the fading. part 3”,inside gnss,第45-53页,2008年7月/8月。
[0074]
[4] d. rubin、t. young,“femtocells: bringing reliable location and timing indoors”,insidegnss,2008年秋。
[0075]
[5]
“ꢀ
lte; evolved universal terrestrial radio access (e-utra); base station (bs) radio transmission and reception (3gpp ts 36.104 version 13.7.0 release 13)”,etsi ts 136 104 v13.7.0(2017-04)。
[0076]
[6]“neo/lea-m8t: u-blox m8 concurrent gnss timing modules. data sheet”,2016年6月21日,在www.u-blox.com处可获得。
[0077]
[7]j.v. cordaro等人,“an alternative source of timing and location using the low earth orbit iridium satellite constellation”,joint navigation conference(联合导航会议),俄亥俄州代顿,2017年6月。
[0078]
[8] d. lawrence等人,“innovation: navigation from leo”,gps world,2017
年6月。
[0079]
[9] t. jost等人,“a wideband satellit-to-indoor channel model for navigation applications”,ieee transactions on antennas and propagation,第62卷,第10期,2014年10月,第5307-5320页。
[0080]
[10] 报告itu-r p.2145-2,“model parameters for the physical-statistical wideband model in recommendation itu-r p.681”,2017年9月。
[0081]
[11] j.a. garcia-molina和j.a. fernandez-rubio,“exploiting spatial diversity in low-cost sdr platforms: the mimo-gnss approach”,6th international colloquium on scientific and fundamental aspects of gnss/galileo(第6届关于gnss/galileo的科学和基本方面的国际学术讨论会),西班牙巴伦西亚,2017年10月。
[0082]
附录a:等式(1)的复合互相关函数的导出我们将收集通过n个天线观察到的所有信号快照的信号向量定义为:,(i)其中,向量收集mimo-gnss系统中针对mn路径的所有复幅度,收集所有天线的噪声(其中),并基于单天线基函数将多天线基函数矩阵定义为:。(ii)我们定义成本函数,使得接收器的状态向量的mimo最大似然估计(mle)通过最小化来找到:。
ꢀꢀꢀ
(iii)为了找到接收器的状态向量的mle的高效实现,我们定义了互相关,和。基于先前的定义,并考虑到复幅度向量c的最小二乘估计量是:,
ꢀꢀꢀꢀ
(iv)可以容易地看出成本函数可以被重写为:
ꢀꢀꢀ
(v)
因此,可以将接收器的状态向量的mle重新定义为:。 (vi)为了将接收器的状态向量的该mle应用于实时接收器,基于针对接收器的每个天线的互相关性来重新表达(reformulate)(vi)中的最大化问题是方便的:和,导致
ꢀꢀꢀ
(vii)其中成本函数被称为要关于状态向量最大化的“复合互相关函数”,其可以被重写为:
ꢀꢀꢀ
(viii)(对应于上面的等式1)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1