表面光洁度触针的制作方法
[0001]
本发明涉及表面光洁度触针、特别是涉及与用于测量机加工零件的表面粗糙度或表面波纹度的多向机床扫描探测头一起使用的表面光洁度触针。
背景技术:
[0002]
通常在工件被机加工后对其进行测量,以确保这些工件满足特定的要求标准。特别地,已知测量已经被机床机加工的工件的外形和/或表面光洁度。虽然常规使用在用于切削工件的机床的主轴中承载的扫描探测头来“在机器上”测量机加工零件的外形,但是这种零件的表面光洁度(例如表面粗糙度)典型地使用专用表面光度仪进行“机器外”测量。
[0003]
典型的表面光度仪包括具有接触工件的尖端的长形轴,该接触工件的尖端从轴的远端垂直延伸。将尖端放置成与待测量的表面接触,并且然后沿该表面推动或拉动该尖端,由此遵循表面的任何精细特征(例如波谷和波峰)。传感器在尖端在水平表面上移动时监测尖端的竖直偏转,由此提供对表面粗糙度的度量。应当注意到的是,表面光度仪是单向装置,这是因为这些表面光度仪被布置成仅测量触针尖端偏转的竖直分量(即,尖端在垂直于其沿着移动的表面的方向上的偏转)。因此,在表面光度仪中,必须小心地控制正被测量的物体与尖端之间的相对移动,以确保在测量过程期间保持尖端总垂直于表面。除了用于制造零件的机床之外还需要单独的表面光度仪,这也增加了生产过程的费用和时间。
[0004]
us 5778551中描述了传统上用于测量物体的外形的具有多向探测头的坐标测量机(cmm)。us 5778551中还描述了可以如何经由旋转接头将表面光洁度触针附接至这种多向探测头。通过使用旋转接头使表面光洁度触针相对于扫描探测头进行合适的旋转,这种布置使得能够从不同定向的表面获取表面光洁度测量值。us 5778551因此描述了专用的cmm(也就是说,不是机床),该cmm被适配成以与表面光度仪相似的方式来测量表面光洁度。虽然这种cmm比表面光度仪更灵活,但是其也比表面光度仪贵的多并且几乎没有提高生产过程的速度。
[0005]
us 2016/0231108描述了一种用于在机床上使用传统上用于获取外形测量值的类型的多向扫描探测头来测量表面光洁度的设备。特别地,设置了表面光洁度触针,该表面光洁度触针包括长形轴,该长形轴承载了旋转对称的盘,该盘从轴正交地突出。盘的最大直径的区域充当接触感测表面,并且盘的旋转对称性允许在轴相对于与长形轴的纵向轴线平行地对齐的任何表面沿其纵向轴线移动时测量该表面的表面光洁度。以此方式,可以测量孔的内表面上不同区域的表面光洁度,而不必重新定向扫描探测头。us2016/0231108的设备可能适合于有限数量的“机器上”表面光洁度测量(例如,孔的内表面的测量),但是在典型的机加工零件上仍然存在许多不同表面取向,这些表面取向根本无法使用这种设备进行测量。
技术实现要素:
[0006]
根据本发明的第一方面,提供了一种用于多向扫描探测头的表面光洁度触针,该
表面光洁度触针包括:
[0007]
具有纵向轴线的长形触针轴,以及
[0008]
从所述长形轴突出的用于接触待测量的表面的一个或多个接触元件,
[0009]
其特征在于,所述一个或多个接触元件被配置成能够在相对于表面沿与所述纵向轴线不平行的测量方向移动所述触针轴期间测量表面光洁度。
[0010]
本发明因此涉及一种用于多向扫描探测头的表面光洁度触针。如下文解释的,多向探测头可以测量附接的触针在多个方向上的偏转,而不是可以通过现有技术的表面光度仪的单向测量传感器感测的单个方向的偏转。本发明的触针还包括具有纵向轴线的长形触针轴以及从长形轴突出的一个或多个接触元件。每个接触元件被布置成接触待测量的表面并且能够在其沿表面移动时测量表面光洁度(例如表面粗糙度和/或表面波纹度等)。特别地,接触元件遵循其沿着移动的表面,并且然后可以通过触针轴所附接的多向探测头来测量接触元件在垂直于表面的方向上的移动。
[0011]
在上述的现有技术的表面光洁度测量设备中,触针轴被定位,从而使得从轴垂直地突出的尖状物(spike)或盘接触待测量的表面。为了采集表面光洁度测量值,触针相对于表面被定位以使得突出的尖状物或盘与表面法线对齐。触针轴然后平行于表面的平面移动,以在尖状物或盘在表面上被拖动的同时保持与表面法线对齐。测量尖状物或盘在表面法线方向上的偏转,以确定表面如何沿表面变化。因此在触针轴相对于表面沿平行于触针轴的纵向轴线的方向移动的同时采集现有技术的表面光洁度测量值。相对取向和相对移动的这种限制意味着测量装置和/或物体需要重新定向,以测量物体在不同平面上的表面(例如水平表面和竖直表面),这是耗时的或在使用某些型号的机床时甚至是不可能的。
[0012]
本发明的特征在于,包括一个或多个接触元件,所述一个或多个接触元件被配置成,能够在相对于表面沿与所述纵向轴线不平行的测量方向移动所述触针轴期间来测量表面光洁度。换言之,一个或多个接触元件允许对表面光洁度进行测量而不受现有技术系统的以下约束的阻碍:必须确保触针轴相对于表面沿平行于触针轴的纵向轴线的方向移动。如在下文中更详细讨论的,本发明的触针的一个或多个接触元件可以从轴与纵向轴线成斜角地突出,或可以设置从轴沿多个不同方向突出的和/或具有不同取向的多个接触元件。这种接触元件构型使得能够移动触针来感测物体的具有不同取向的多个表面的表面光洁度(例如水平表面和竖直表面),而不必相对于物体重新定向测头。
[0013]
有利地,该一个或多个接触元件被定向成与所述纵向轴线成斜角。因此,优选地,一个或多个接触元件不像现有技术的触针那样从轴垂直地延伸,而是与触针轴成非垂直角或斜角地突出。因此,触针轴可以相对于表面倾斜,并且沿与其纵向轴线不平行的方向移动,以在触针轴沿该表面移动时保持接触元件与表面的表面法线对齐。如果设置多个接触元件,则这些接触元件可以自轴且呈如下角度来延伸,该角度允许测量不同取向表面而不必相对于物体来重新定向测头。
[0014]
在优选的实施例中,该一个或多个接触元件包括中空圆锥形元件。圆锥形元件可以具有外围边缘,该外围边缘从长形触针轴与纵向轴线成斜角地突出。外围边缘优选地形成圆锥体的底部并且圆锥体的顶点可以与触针轴的纵向轴线重合。外围边缘优选地被布置成接触待测量的表面;例如,中空圆锥体的外围边缘可以具有修圆部并且具有适合于表面光洁度测量的有效半径。圆锥形元件可以包括完整的中空圆锥体(即,外围边缘环绕圆周的
整个360
°
)或部分的中空圆锥体(即,外围边缘仅环绕触针轴的圆周的一部分)。在使用中,使外围边缘与物体的表面发生接触,其中触针被适当地定向成使得圆锥形元件从触针轴沿着延伸的方向与表面法线局部对齐。然后,触针可以平移以沿表面移动圆锥形元件,同时保持与表面法线局部对齐。可以根据接触元件在垂直于表面的方向上的移动来确定表面光洁度信息。
[0015]
有利地,斜角为大约45
°
。因此,圆锥形元件的外围边缘可以以45
°
的斜角从触针轴突出。可以使用这种与竖直方向成45
°
定向的触针来测量水平表面和竖直表面两者的表面粗糙度;即,外围边缘在直径上相反的两部分可以与竖直表面和水平表面两者的表面法线方向对齐。于是,仅通过平移移动(即,无需相对于触针重新定向物体)就可以沿物体的竖直表面和水平表面移动(推动或拉动)触针。
[0016]
有利地,一个或多个接触元件包括多个接触元件。多个接触元件相对于触针轴优选地具有多个不同取向。换言之,多个接触元件可以从轴沿不同方向突出和/或与轴成不同角度对齐。例如,一个接触元件可以从触针轴的远端沿纵向轴线突出并且其他接触元件可以从轴的侧面突出。于是可以使用不同的接触元件来测量相对于触针轴具有不同取向的表面的表面光洁度。例如,如果触针被竖直地固持,则可以使用从触针轴的远端突出的接触元件来测量水平表面,同时可以使用其他接触元件来测量竖直表面。
[0017]
一个或多个接触元件可以与触针轴一体形成。替代性地,一个或多个接触元件可以附接(永久地或可释放地)至触针轴。在优选的实施例中,该触针轴包括一个或多个夹具,所述一个或多个夹具用于固持该一个或多个接触元件。以此方式,一个或多个接触元件可以被夹紧至触针轴。
[0018]
有利地,一个或多个接触元件包括金属盘。金属盘可以被成形。可以通过弯折金属盘来进行盘的这种成形。金属盘可以被成形以提供所期望的接触元件布置(例如,该金属盘可以被弯折以提供一个或多个接触元件或以形成中空圆锥体)。盘的成形/弯折还可以用于帮助将盘夹紧在相对于触针轴的固定位置。金属盘可以包括促使弯折成所期望的形状的薄弱区域(例如更薄区域)。当金属盘(例如使用上述夹具)被夹紧到触针轴上时,可以实现金属盘的任何此类弯折。该金属盘还可以包括形成在其中的多个狭缝,该狭缝使得该盘的多个区域能够被弯折以形成接触元件,该接触元件从该金属盘的平面突出。于是单件材料(例如,单个金属盘)可以提供多个接触元件。替代性地,多个单独的接触元件可以附接至触针轴。
[0019]
一个或多个接触元件可以由任何合适的材料形成。例如,可以使用陶瓷或玻璃材料。替代性地,一个或多个接触元件可以由金属形成。
[0020]
形成一个或多个接触元件的材料优选地具有低刚度(以使对正被测量的表面的损坏最小化)。有利地,一个或多个接触元件的杨氏模量(e)小于250gpa。更优选地,一个或多个接触元件的杨氏模量小于150gpa。更优选地,一个或多个接触元件的杨氏模量小于100gpa。更优选地,一个或多个接触元件的杨氏模量小于50gpa。
[0021]
有利地,材料在机械上也较硬(即减少磨损)。因此,形成一个或多个接触元件的材料优选地具有高硬度。有利地,一个或多个接触元件的硬度(h)大于1gpa。合宜地,一个或多个接触元件的硬度(h)大于2gpa。优选地,一个或多个接触元件的硬度(h)大于5gpa。
[0022]
一个或多个接触元件的杨氏模量(e)和硬度(h)属性各有其重要意义,但是在为接
触元件选择合适的材料时也可以使用刚度与硬度之比(“e/h”比)。特别地,优选的是e/h比尽可能低。例如,e/h比优选地小于50。更优选地,e/h比小于20。更优选地,e/h比为15或更小。更优选地,e/h比小于10。
[0023]
一个或多个接触元件可以包括任何合适的材料(例如具有上文概述的属性)。接触元件可以由多种材料形成。有利地,接触元件包括单一材料。合宜地,(多个)接触元件包括金属;例如,金属盘或金属片材可以形成接触元件。接触元件可以包括钢。例如,接触元件可以包括铬钢,例如瑞典斯德哥尔摩山特维克公司(sandvik ab)生产的马氏体铬钢“chromflex”。chromflex具有210gpa的杨氏模量(e)和5.8gpa的硬度(h)(因此e/h=36)。替代性地,接触元件可以包括氧化锆(e=200gpa、h=11.8gpa、并且e/h=17)。替代性地,接触元件可以包括滑石(e=120gpa、h=5.8gpa、并且e/h=21)。替代性地,接触元件可以包括n-bk7硼硅酸盐玻璃(e=82gpa、h=5.6gpa、并且e/h=15)。有利地,接触元件可以包括镍钛诺(e=45gpa、h=5.5gpa、并且e/h=8)。
[0024]
一个或多个接触元件可以被配置用于测量任何方面的表面光洁度。应当注意到的是,术语“表面光洁度”是指比用标准扫描探测头测量的表面的外形更精细的表面细节。一个或多个接触元件可以被配置用于测量表面波纹度。一个或多个接触元件可以被配置用于测量表面粗糙度。表面波纹度和表面粗糙度是表面光洁度的示例。
[0025]
一个或多个接触元件的尺寸优选地被确定用于测量所需方面的表面光洁度。例如,一个或多个接触元件的远端(或尖端)可以具有小于300μm的有效半径。有效半径是接触元件在与接触元件在表面上移动的方向平行的方向上的半径或尺寸(例如,接触元件盘的边缘厚度)。有利地,一个或多个接触元件可以具有小于200μm的有效半径。有利地,一个或多个接触元件具有小于100μm的有效半径。有利地,一个或多个接触元件具有小于50μm的有效半径。接触元件的物体接触端或尖端越小,可以测量的表面纹理的分辨率就越精细(但是接触元件在使用过程中更容易磨损或损坏)。对于表面粗糙度,可以使用测量的表面纹理的变化来产生“ra”表面粗糙度值。
[0026]
触针优选地是不打滑的(即,触针优选地不包括打滑部并且只有接触元件与正被测量的表面接合)。优选地,触针轴可直接附接至扫描探测头的触针固持器。优选地,触针轴也是刚性的。有利地,触针轴不包括任何旋转接头(转向接头)或用于改变接触元件相对于触针轴所附接的扫描探测头的触针固持器的取向的类似物。以此方式,接触元件的位置和取向相对于触针轴所附接的扫描探测头的触针固持器是不变的。
[0027]
本发明还扩展到包括上述表面光洁度触针的多向扫描探测头。于是可以使用多向扫描探测头来获取表面光洁度测量值。多向扫描探测头优选地包括探测头主体和可移动地附接至探测头主体的触针固持器。触针可以相对于扫描探测头的壳体在两个相互垂直的方向中的任一方向上或在三个相互垂直的方向中的任何方向上可偏转。可以设置至少一个偏转传感器来测量触针固持器相对于探测头主体的偏转。如以上所描述的表面光洁度触针可以(例如经由标准螺纹附接件)附接至触针固持器。在优选的实施例中,扫描探测头包括机床扫描探测头(即,扫描探测头适用于机床环境)。
[0028]
如上所述,至少一个偏转传感器可以设置在扫描探测头内,以测量触针偏转并且由此产生可以通过扫描探测头输出的测头数据。扫描探测头可以包括偏转传感器,该偏转传感器只能测量触针偏转量(而不能测量触针偏转方向);即,扫描探测头可以包括多向单
个输出扫描探测头,该多向单个输出扫描探测头产生仅描述触针偏转量的测头数据。例如,扫描探测头可以包括由德国波龙科技有限公司(blum novotest gmbh)制造的tc76-digilog或tc64-digilog扫描探测头或由意大利马波斯(marposs)公司销售的型号g25测头。替代性地,扫描探测头可以包括可以测量任何触针偏转量和触针偏转方向两者的传感器。例如,模拟扫描探测头可以产生三个输出信号,这三个输出信号涉及触针端头在三个相互正交的方向上的偏转。由英国的沃顿-安德埃奇的雷尼绍公司(renishaw pic,wotton-under-edge,uk)制造的sprint(osp-60)探测系统是这种扫描探测头的示例。
[0029]
根据本发明的第二方面,提供了一种用于使用包括表面光洁度触针的多向扫描探测头来测量物体的表面光洁度的方法,该表面光洁度触针包括具有纵向轴线的长形触针轴以及从该长形轴突出的用于接触待测量的表面的一个或多个接触元件,所述方法的特征在于以下步骤:通过相对于表面沿与所述纵向轴线不平行的测量方向移动所述触针轴来测量表面光洁度。
[0030]
有利地,所述测量表面光洁度的步骤包括相对于所述表面将所述表面光洁度触针定向成在相对于所述表面沿所述测量方向移动所述触针轴时,保持所述接触元件与局部表面法线对齐。以此方式,测量沿表面法线方向的触针偏转。该方法还可以包括上述触针的任何特征或使用方式。
[0031]
根据本发明的另一方面,提供了一种用于多向扫描探测头的表面光洁度触针,该表面光洁度触针包括具有纵向轴线的长形轴以及从长形轴延伸的多个接触元件。多个接触元件相对于触针轴优选地具有多个不同取向。有利地,所述多个接触元件包括第一接触元件,所述第一接触元件从所述长形轴的远端沿所述纵向轴线突出。优选地,多个接触元件包括从长形轴径向地或倾斜地突出的至少一个接触元件。可以根据需要设置另外的接触元件。触针还可以包括上述触针的任何特征。
[0032]
根据本发明的另一方面,提供了一种用于多向扫描探测头的表面光洁度触针,该表面光洁度触针包括具有纵向轴线的长形轴以及从长形轴相对于纵向轴线成斜角地延伸的一个或多个接触元件。所述一个或多个接触元件包括中空圆锥形元件。圆锥形元件可以与纵向轴线成45
°
斜角地突出。触针还可以包括上述触针的任何特征。
附图说明
[0033]
技术人员应了解的是,上述任何特征可以与下文描述的特定实施例中的任何一个或多个特征相组合。同样地,在方法的背景下描述的特征可以形成设备的一部分,并且反之亦然。
[0034]
现在将仅通过示例、参考附图来描述本发明,在附图中:
[0035]
图1示出了现有技术的表面光度仪设备,
[0036]
图2示出了现有技术的表面粗糙度机床扫描探测头,
[0037]
图3a和图3b示出了本发明的表面光洁度触针,
[0038]
图4a和图4b更详细地示出了参考图3描述的触针的圆锥形插入盘,
[0039]
图5示出了包括两个接触元件盘的替代性的表面光洁度触针,
[0040]
图6示出了包括多个接触元件的表面光洁度触针的替代性的实施例,
[0041]
图7示出了包括三个正交定向的接触元件的表面光洁度触针的替代性的实施例,
[0042]
图8a和图8b示出了折叠金属盘以形成多个取向下的接触元件,以及
[0043]
图9示出了包括多个接触元件的表面光洁度触针的另一实施例。
具体实施方式
[0044]
参照图1,示意性地示出了现有技术的表面光度仪。表面光度仪包括壳体2,具有纵向轴线l的长形轴4从该壳体延伸。接触元件6从轴4沿方向p垂直地延伸。壳体2包括单向转换器(未示出),该单向转换器测量轴4由接触元件6沿方向p来回移动而引起的任何偏转。
[0045]
在使用中,接触元件6与物体10的表面发生接触。接触元件6然后相对于物体10沿方向m移动,该方向与纵向轴线l平行。物体10与表面光度仪之间的这种相对移动可以通过移动表面光度仪(例如通过线性地缩回/延伸轴4)、物体10、或物体和表面光度仪两者来施加。相对移动的结果为使得接触元件6在物体10的表面上沿路径12移动(即,被推动或被拉动)。接触元件6还上下移动以遵循表面;这可以在图1的小图中看出,该小图提供了接触元件6的尖端与物体的表面的放大视图。壳体2内的单向转换器输出偏转信号,该偏转信号与接触元件6的竖直偏转(即沿方向p的偏转)相关。对随穿过路径12的偏转信号变化的分析提供了对物体的该区域的表面光洁度的度量。例如,可以计算出平均表面粗糙度或r
a
值。
[0046]
参照图2,将更详细地描述us 2016/0231108的现有技术的表面粗糙度测头20。如上所述,us 2016/0231108的扫描探测头是多向扫描探测头,该多向扫描探测头可以安装至机床的主轴,以允许“在机器上”测量工件。
[0047]
扫描探测头20包括探测头主体22以及用于固持触针的触针固持器21。触针固持器21通过偏转机构(未示出)附接至探测头主体22,并且探测头主体22内还设置有转换器23,以用于测量触针固持器21相对于探测头主体22的偏转量(即,由附接的触针的偏转引起的)。由转换器23得到的偏转测量值通过发射器单元25传递给测头接口27。探测头主体22还可经由工具柄(未示出)附接至机床的主轴。测头20因此可以围绕机床的工作体积移动,并且特别地测头触针可以与待测量的物体的表面发生接触。
[0048]
传统上这种类型的扫描探测头20与能够测量物体的外形的触针一起使用;例如,这种触针可以包括几毫米直径的红宝石球体,该红宝石球体附接至长形轴的远端。在us 2016/0231108描述的多个不同的示例中,表面粗糙度触针24代替地附接至测头20。表面粗糙度触针24包括长形轴30和接触元件28,该接触元件沿与轴30的纵向轴线l垂直的方向p延伸。接触元件28具有双截头圆锥体的外形,围绕其周向的外围边缘26(在图2的小图中示出)具有修圆部。
[0049]
在使用中,使垂直方向p与待测量的表面的表面法线n平行地对齐,接触元件28从轴30沿垂直方向突出。图2以虚线轮廓示出了物体36的合适的竖直表面34。接触元件28的外围边缘26与竖直表面34发生接触,并且测头20然后沿方向m竖直向上移动。为了保持接触元件28的垂直突出方向p与表面法线n的所需对齐,测头20沿方向m竖直地移动,该方向既与触针轴30的纵向轴线l平行又与表面34的平面平行。扫描探测头20的转换器23在触针沿表面34被拖动时测量触针偏转量,这些测量的偏转值用于确定表面粗糙度。
[0050]
本发明人已经认识到与us 2016/0231108中描述的布置相关联的多个缺点。例如,扫描探测头20必须沿既与触针轴30的纵向轴线l平行又与表面(例如表面34)的平面平行的方向m移动。这些约束是必要的,以确保在穿过路径时,正被测量的表面的表面法线n保持与
垂直方向p平行,接触元件28从轴30沿该垂直方向突出。例如,通过上下竖直移动测头,可以在竖直孔内的任何周向位置处测量表面粗糙度。然而,测量在相对于触针轴的纵向轴线l成角度的平面上的表面(例如,诸如盲孔的底表面等水平表面)而不必以某种方法重新定向扫描探测头或物体,这是不可能的。例如,扫描探测头20必须相对于物体重新定向90
°
,以测量竖直表面和水平表面两者。这种重新定向在某些型号的机床上根本是不可能的,并且即使是可能的,也可能导致测量过程延时,由此增加了生产成本。
[0051]
下文描述的触针布置克服了us 2016/0231108的布置的多种不同的缺点。例如,下文描述的触针允许测量沿被定向成在与轴的纵向轴线不平行的平面上的表面的表面粗糙度,用于测量表面光洁度的接触元件从该轴突出。还描述了允许测量不同定向的表面而不必相对于物体重新定向测头或触针的触针。
[0052]
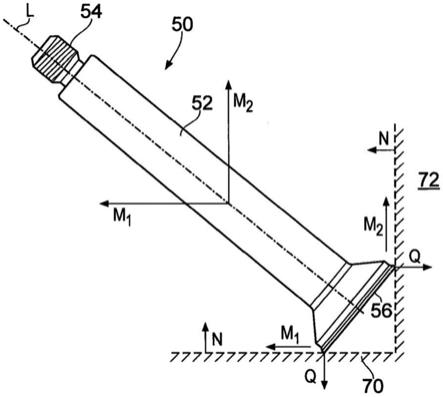
图3a和图3b示出了本发明的表面光洁度触针50。触针50包括具有纵向轴线l的长形触针轴52。触针轴52的近端包括螺纹附接构件54,该螺纹附接构件使得触针能够附接至多向扫描探测头(未示出)的触针固持器。触针轴52的远端包括呈中空、圆锥形金属盘56外形的接触元件。金属盘56通过楔形固位构件60固持在截头圆锥形凹部58中,该楔形固位构件通过螺栓62附接至触针轴。金属盘56因此是裙状接触元件,该裙状接触元件围绕触针轴52的周向延伸并且沿相对于纵向轴线l成45
°
的角度的方向q突出。
[0053]
在使用中,表面光洁度触针50可以用于测量具有不同取向的多个表面的表面光洁度,而不必重新定向扫描探测头。例如,如图3a所示,表面光洁度触针50与水平方向(和竖直方向)成45
°
的角度倾斜。然后可以沿方向m1移动表面光洁度触针50,以便测量水平表面70的表面光洁度;即,通过水平移动m1沿水平表面70拉动接触元件56,同时固持触针50的扫描探测头测量触针偏转。然后可以沿方向m2移动表面光洁度触针50,以便测量竖直表面72的表面光洁度;即,通过竖直移动m2沿竖直表面72拉动接触元件56的直径上相反的部分,同时固持触针50的扫描探测头再次测量触针偏转。为了进行水平测量和竖直测量两者,突出的接触元件56保持与表面法线n垂直定向(即,在触针沿方向m1和m2移动时保持方向q与局部表面法线n对齐,接触元件沿该方向从长形轴突出)。
[0054]
与参考图2描述的现有技术的布置不同,表面光洁度触针50不受触针移动方向必须沿触针轴的纵向轴线的限制的约束。这使得能够测量具有不同取向的表面,而不必相对于物体重新定向扫描探测头,由此增加了测量灵活性并且减少了测量时间。
[0055]
简要参考图4a和图4b,描述了用于制造参考图3a和图3b描述的表面光洁度触针50的技术。特别地,描述了用于形成金属盘56的方法,该金属盘提供了触针的接触元件。
[0056]
如图4a所述,提供了平坦的金属盘56
’
。盘56
’
包括中心孔口80和环形区域82,该环形区域的材料比盘的其余部分更薄。现在也参考图3b,楔形固位构件60位于螺栓62上,以接合已经放在螺纹螺栓上的平坦的金属盘56
’
;中心孔口80的直径略大于螺栓螺纹的直径,以提供间隙。然后将螺栓62拧入触针轴中,由此推动平坦的金属盘56
’
与截头圆锥形凹部58接合。平坦的金属盘56
’
因此夹在楔形固位构件60与截头圆锥形凹部58之间,并且拧紧螺栓62来使平坦的金属盘56
’
变形,以提供图4b和图3b所示的圆锥形金属盘56。这确保了金属盘56被牢固地附接至触针轴并且还使得能够容易地更换金属盘56(例如如果该金属盘发生磨损或损坏),而不必更换整个表面光洁度触针。应当注意到的是,虽然形成中空圆锥形接触元件的这个方法是有利的,但是也可以使用其他制造技术。
[0057]
图5示出了表面光洁度触针的替代性的实施例。具有纵向轴线l的长形触针轴100固持第一接触元件102和第二接触元件104。第一接触元件102是从触针轴100垂直地延伸的盘,该盘可以在沿方向m1移动时感测与纵向轴线l对齐的表面的表面粗糙度。第二接触元件104也是盘,但是位于第一接触元件102下方并且垂直于该第一接触元件定向。第二接触元件104被定位成位于纵向轴线上并且可以在相对于表面沿方向m2移动时测量表面粗糙度。方向m2与方向m1垂直。
[0058]
图6示出了表面光洁度触针的替代性的实施例。再次设置了具有纵向轴线l的长形触针轴120。开槽的金属盘122被附接至轴120的远端。金属盘的第一区段124通过两个螺钉123附接至平坦的支撑表面,该支撑表面位于与纵向轴线l平行的平面。第一区段124提供了可以用于通过沿方向m2移动来测量竖直或水平表面的表面粗糙度的接触元件。盘的第二区段126弯折以与纵向轴线l垂直地延伸并且通过螺钉127被固持在平坦的支撑表面上,该支撑表面与纵向轴线l垂直。第二区段126形成了用于在沿方向m1移动时测量与纵向轴线l对齐的表面的粗糙度的接触元件。
[0059]
图7示出了表面光洁度触针的替代性的实施例。具有纵向轴线l的长形触针轴140在其远端包括卵形壳142。第一接触元件144、第二接触元件146、和第三接触元件148突出穿过壳142中的孔口。第一接触元件144从壳142的底部沿纵向轴线突出。第一接触元件144因此可以用于测量与触针垂直的表面的表面粗糙度。例如,如果纵向轴线l与竖直方向对齐,则第一接触元件144可以沿方向m3沿着水平表面移动。第二接触元件146从轴延伸并且被定向成沿方向m2测量表面粗糙度。例如,如果纵向轴线l与竖直方向对齐,则第二接触元件146可以沿竖直表面上的水平等高线测量表面粗糙度。第三接触元件148形成了用于在沿方向m1移动时测量与纵向轴线l对齐的表面的粗糙度的接触元件。作为图7所示的实施例的变体,可以提供带有额外的接触元件或替代性的接触元件布置的表面光洁度触针。例如,可以在卵形壳142的相反两侧上设置接触元件对。
[0060]
接下来参考图8a和图8b,描述了可折叠金属片材可以如何用来形成以下表面光洁度触针:该表面光洁度触针可以设置允许沿多个不同方向测量表面光洁度的多个接触元件。图8a示出了被切割成盘160的金属片材,该盘包括允许折叠盘的所选区段的切口。图8b示出了可以如何向上折叠区域162和164,以提供用于沿方向m2感测表面光洁度的接触元件。可以向下折叠区域166,以形成用于沿方向m3感测表面光洁度的接触元件。边缘区域168可以提供用于在沿方向m1移动时测量与纵向轴线l对齐的表面的粗糙度的(不被折叠的)接触元件。图8b的折叠式盘可以容纳在壳中,使得接触元件以与图7所示的方式相似的方式突出穿过壳。
[0061]
图9示出了另一具有长形触针轴192的表面光洁度触针190,该长形触针轴具有纵向轴线l。附接至轴192的载架194固持第一接触元件196和第二接触元件198。所示出的接触元件196和198是单斜面边缘表面光洁度触针,如日本神奈川三丰公司(mitutoyo corporation)出售的。第一接触元件196被定向成在触针沿与纵向轴线l平行的方向m1移动时测量表面光洁度;例如,沿竖直表面上下测量表面光洁度。第二接触元件198被定向成在触针沿方向m2移动时测量表面光洁度;例如,沿竖直表面的水平等高线测量表面光洁度。
[0062]
技术人员应认识到上述仅仅是本发明的示例。根据本发明可以提供替代性的触针结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1