具有偏移补偿的电感式位置传感器的制作方法
1.本发明涉及利用涡流耦合的电感式位置传感器的技术领域。
2.本发明发现用于确定例如车辆、发动机或机床中的移动部件的线性位置或角位置的应用。
背景技术:
3.现有技术已经提出了用于测量移动体沿线性路径或角路径的位置的、利用涡流耦合的电感式传感器的各种方案。
4.为了确定移动体的线性位置,专利us 6483295描述了一种位置传感器,其包括相对于固定的板(card)或印刷电路板移位的可移动安装目标件。电路板包括连接到交流发电机的初级线圈,该初级线圈允许在所述初级线圈中的电流流动期间产生磁场。该初级线圈围绕次级线圈。由此产生的磁场被次级线圈感知并在所述次级线圈中感应出电流。
5.目标件由导电材料制成,以允许涡流流动。该目标件相对于初级线圈和次级线圈线性移动。初级线圈和次级线圈之间的电感耦合通过目标件的位置进行调节。选择次级线圈的几何形状,使得次级线圈传递的感应信号取决于目标件的位置。连接到次级线圈的检测器允许根据从次级线圈得出的感应信号确定目标件的位置。
6.然而,似乎至少一个次级线圈不具有关于初级线圈的端部的对称的形状。次级线圈中构造的不对称性导致出现偏移测量信号或测量偏移。为了克服该缺点,专利us6483295提出减小次级线圈在初级线圈的端部处的尺寸。该方案具有以下缺点:对于恒定空间要求的传感器,减小了线性测量部分。
7.在角位置测量传感器的领域中,为了克服磁场线集中在初级线圈的端部处的问题,专利fr3023611提出了特别是通过界定全网格的轨道来制造次级线圈。该方案的缺点是增加了电路的尺寸,该电路的初级线圈围绕两个次级线圈。
8.同样地,文献gb2167563描述了一种利用涡流耦合的位置或速度传感器。根据实施例,该文献提出将目标件分成多个部分以获得线性信号或实现多个次级线圈以获得整个行程上的清晰信号。这样的方案不允许补偿测量偏移。
9.专利us5886519也描述了一种位置传感器,特别地提出补偿制造公差或趋于产生信号偏移的其他约束,改变次级线圈的尺寸和形状或初级线圈与次级线圈之间的距离,该距离具有至少一个周期。该方案导致传感器的尺寸增加。
技术实现要素:
10.因此,本发明旨在通过提出一种用于确定移动体的线性位置或角位置的新型电感式传感器来克服现有技术的缺点,从而有可能减少测量偏移,同时在次级线圈的整个产生范围内保持测量范围。
11.为了实现这样的目的,根据本发明的用于确定移动体沿线性或旋转路径的位置的电感式位置传感器包括:
‑
沿着路径移动的目标件,其适于改变电磁场;
‑
固定的电路板,其相对于目标件沿着相对于路径的受限部分延伸,并且包括围绕两个次级线圈的初级线圈,这两个次级线圈具有基本相同的长度并且具有正弦和余弦函数形状,每个次级线圈包括至少一个向外轨道和至少一个返回轨道;
‑
电流发生器,其用于初级线圈或次级线圈,以在初级线圈和次级线圈之间产生由目标件的位置调节的电感耦合;
‑
目标件的线性位置或角位置的检测器,其根据从次级线圈或初级线圈得到的感应信号;以及
‑
系统,其用于平衡初级线圈和次级线圈之间的耦合以补偿由次级线圈和初级线圈的端部段之间的接近引起的测量偏移。
12.此外,根据本发明的传感器还可以包括以下附加特征中的至少一个:
‑
初级线圈的长度大于次级线圈的长度,以使初级线圈的每个端部段相对于次级线圈的相邻端部,位于小于10毫米的距离处或位于次级线圈的周期的1/4的距离处;
‑
耦合平衡系统包括至少一个补偿电容器,其安装在初级线圈和次级线圈之间;
‑
对于至少一个次级线圈,沿垂直于路径的方向并沿确保位于初级线圈的端部段处的次级线圈的形状减小的路径,耦合平衡系统包括在所述次级线圈的向外轨道的等分线或等分半径与所述次级线圈的返回轨道的等分线或等分半径之间的至少一个偏移;
‑
所述次级线圈的向外轨道的等分线或等分半径与所述次级线圈的返回轨道的等分线或等分半径之间的偏移相对于另一线圈的轨道的等分线或半径对称;
‑
耦合平衡系统通过调节次级线圈的形状来产生,以确保在初级线圈的端部段处的线圈的形状减小;
‑
对于旋转路径目标件,通过以下公式描述正弦次级线圈的向外轨道的形状和返回轨道的形状:youtward(θ)=ymoy_outward+e(θ)*(a1*sin(a*θ+φ1)+a2*sin(2*a*θ+φ2)+a3*sin(3*a*θ+φ3)
…
+an*sin(n*a*θ+φn));yreturn(θ)=ymoy_return+e(θ)*(
‑
a1*sin(a*θ+φ1)
‑
a2*sin(2*a*θ+φ2)
‑
a3*sin(3*a*θ+φ3)
…‑
an*sin(n*a*θ+φn));以及对于余弦次级线圈(9):youtward(θ)=ymoy_outward+e(θ)*(a1*cos(a*θ+φ1)+a2*cos(2*a*θ+φ2)+a3*cos(3*a*θ+φ3)
…
+an*cos(n*a*θ+φn));yreturn(θ)=ymoy_return+e(θ)*(
‑
a1*cos(a*θ+φ1)
‑
a2*cos(2*a*θ+φ2)
‑
a3*cos(3*a*θ+φ3)
…‑
an*cos(n*a*θ+φn));其中,e(θ)是包裹函数;
‑
对于线性位移目标件,通过以下公式描述正弦次级线圈的向外轨道的形状和返回轨道的形状:youtward(x)=ymoy_outward+e(x)*(a1*sin(a*x+φ1)+a2*sin(2*a*x+φ2)+a3*sin(3*a*x+φ3)
…
+an*sin(n*a*x+φn));yreturn(x)=ymean_return+e(x)*(
‑
a1*sin(a*x+φ1)
‑
a2*sin(2*a*x+φ2)
‑
a3*sin(3*a*x+φ3)
…‑
an*sin(n*a*x+φn));
以及对于余弦次级线圈:youtward(x)=ymoy_outward+e(x)*(a1*cos(a*x+φ1)+a2*cos(2*a*x+φ2)+a3*cos(3*a*x+φ3)
…
+an*cos(n*a*x+φn));yreturn(x)=ymoy_return+e(x)*(
‑
a1*cos(a*x+φ1)
‑
a2*cos(2*a*x+φ2)
‑
a3*cos(3*a*x+φ3)
…‑
an*cos(n*a*x+φn));其中,e(x)是包裹函数;
‑
包裹函数在初级线圈的中心处具有最大值。
附图说明
13.从以下参考附图给出的描述中得出了各种其他特征,这些附图通过非限制性示例示出了本发明的目的的实施例。
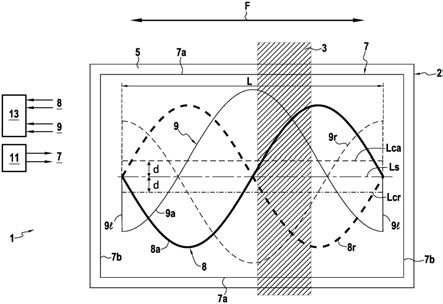
14.图1是根据本发明的位置传感器的第一实施例的示意图。
15.图2a至图2c是示出根据本发明的位置传感器的通过电容耦合的第二实施例的不同变型的图。
16.图3是用于限定根据本发明的传感器的第三实施例的次级线圈的形状的梯形包裹函数的视图。
17.图4是根据本发明的位置传感器的第三实施例的示意图。
18.图5是实现第三实施例的根据本发明的角位置传感器的示意图。
具体实施方式
19.如在附图中更具体地示出的,本发明的目的涉及一种用于移动体的位置传感器1,在一般意义上,该移动体未示出并且其位置将沿着线性路径或角路径f被确定。
20.位置传感器1包括定子件2和沿路径f可移动安装的目标件3。因此,目标件3由移动体驱动或被布置在其位置待确定的移动体上。目标件3由诸如金属材料等导电材料制成,以允许涡流流动。
21.参照图1,位置传感器1的定子件2在对应于移动体(即,目标件3)的行程的有限长度上产生。定子件2包括相对于目标件3固定地安装的板或电路板5。以已知的方式,电路板5包括仅围绕两个次级线圈8、9的初级线圈7,这两个次级线圈8、9与初级线圈7磁性耦合。因此,初级线圈7具有两个主段7a和两个端部段7b,两个主段7a彼此平行延伸并且平行于路径f延伸,两个端部段7b彼此平行延伸并且相对于路径f垂直地延伸。
22.通常,交流发电机11连接到初级线圈7,其允许当电流在所述初级线圈中流动时产生磁场。由此产生的磁场被次级线圈8、9感知,并在所述次级线圈中感应出电压。例如,电流发生器11传递高频交流电,从而允许在目标件3中建立涡流。
23.通过目标件3的位置来调节初级线圈7和次级线圈8、9之间的电感耦合。目标件3改变初级线圈7与两个次级线圈8、9之间的磁耦合。这些次级线圈8、9链接到检测器13,该检测器13通过测量在次级线圈8、9的端子处感应的电压,允许推断出目标件3的准确位置。因此,检测器13允许确定移动体的位置。
24.根据该配置,初级线圈7被称为“发送器线圈”,而次级线圈8、9被称为“接收器线圈”。应该注意的是,可以设想反向操作,其中电流发生器11链接到作为发送器的次级线圈
8、9,而初级线圈7是接收器线圈,并且检测器13连接到该初级线圈7,根据该检测器13,感应的信号的相位允许推导出目标件3的准确位置。
25.为了附图的清楚起见,未示出线圈7、8、9的入口和出口。同样,每个线圈由形成回路或绕组的向外轨道和返回轨道表示。当然,每个线圈7、8、9可包括多个向外轨道和多个返回轨道。每个线圈的向外轨道和返回轨道具有合适的形状,使得可以在它们之间界定网格。
26.应当注意,沿着路径f截取的次级线圈8、9的长度限定了用于测量位置传感器1的窗口。根据本发明的一个特征,两个次级线圈8、9布置成使得它们的两个端部位于垂直于路径f的两条线上,并隔开距离l。因此,两个次级线圈8、9具有基本相同的长度l,其是沿平行于路径f的方向截取的并对应于用于测量位置传感器1的窗口。
27.在图1和图3所示的示例中,箭头f表示的路径是线性的,使得线圈的构造沿线性方向形成。当然,对于角路径,可以理解图1和图3所示的线圈的构造。因此,沿例如图5中所示的角方向形成线圈的构造。因此,图4和图5示出了分别用于线性路径和角路径的线圈的相同构造。
28.以已知的方式,在测量窗口中存在目标件3的情况下,放置在所述目标件3附近的次级线圈8、9的磁场通量比没有目标件3的情况下的磁场通量低。每个次级线圈8、9通常由相反取向的网格组成,使得当目标件3在这些网格上方移过一个接一个网格时,次级线圈的磁场(跨过次级线圈)的通量相对于零平均值相对增加,然后相对减少。通常,一方面,在具有被称为“正弦”的正弦函数的形状的次级线圈8和具有被称为“余弦”的余弦函数的形状的次级线圈9之间存在区别,该次级线圈8适于在目标件3穿过测量窗口时传递正弦信号,该次级线圈9适于在目标件3穿过测量窗口时传递余弦信号。传输到检测器13的正弦/余弦信号允许通过计算反正切来确定目标件的准确角度或线性位置。
29.正如本申请的序言中提到的,只有当初级线圈产生的磁场在时间上恒定并且在次级线圈的整个区域内均匀(homogeneous)时(测量范围受到限制的初级线圈7产生的磁场不是这种情况),才可以通过正弦形状的次级线圈获得正弦信号。
30.根据本发明,电感式位置传感器包括用于平衡初级线圈7和次级线圈8、9之间的耦合的系统,该系统适于补偿测量偏移。该平衡系统适于补偿由次级线圈8、9和初级线圈7的端部段7b之间的接近引起的测量偏移。在这方面,初级线圈7的长度略大于次级线圈8、9的长度l。通常,初级线圈的每个端部段7b,相对于次级线圈8、9的相邻端部,位于小于10毫米或次级线圈8、9的周期的1/4的距离处。
31.以下描述描述了旨在减少该测量偏移的这种平衡系统的三个实施例。
32.图1示出了第一实施例,在第一实施例中,对于至少一个次级线圈8、9,耦合平衡系统沿垂直于路径f的方向和沿确保位于初级线圈7的端部段7b处的次级线圈的形状减小的路径,包括在向外轨道的等分线与返回轨道的等分线之间的至少一个偏移。
33.在所示的示例中,次级线圈8具有正弦函数的形状,并且由向外轨道8a和返回轨道8r组成,在向外轨道8a和返回轨道8r之间界定第一网格和第二网格。次级线圈9具有余弦函数的形状,并且由向外轨道9a和返回轨道9r组成,在向外轨道9a和返回轨道9r之间界定第一半网格、中央网格和第二半网格。应当注意,根据该实施例,次级线圈8、9分别具有精确的正弦函数形状和余弦函数形状。
34.位于初级线圈的每个端部段7b附近的正弦次级线圈8的向外轨道8a和返回轨道8r
的端部位于同一位置,使得正弦次级线圈8的向外轨道8a和返回轨道8r具有共同的等分线ls。该等分线ls平行于路径f。
35.余弦次级线圈9的向外轨道9a和返回轨道9r沿垂直于路径f的方向并沿确保位于初级线圈7的端部段7b处的次级线圈的形状减小的路径偏移。应该考虑到,鉴于以正弦函数的形状为中心的余弦函数的常规配置,余弦次级线圈9的向外轨道9a和返回轨道9r偏移。因此,余弦次级线圈9的向外轨道9a和返回轨道9r在其端部处通过连接轨道9l连接,该连接轨道9l垂直于路径f延伸。
36.余弦次级线圈9的向外轨道9a偏移,使得其等分线lca相对于正弦次级线圈8的等分线ls偏移值+d。同样,余弦次级线圈9的返回轨道9r偏移,使得其等分线lcr相对于正弦次级线圈8的等分线ls偏移值
‑
d。因此,余弦次级线圈的向外轨道9a的等分线lca与余弦次级线圈的返回轨道9r的等分线之间的偏移相对于正弦次级线圈的轨道的等分线对称。注意,当路径f成角度时,等分线对应于等分半径。
37.另外,余弦次级线圈9的向外轨道9a和返回轨道9r沿着确保位于初级线圈7的端部段7b处的次级线圈的形状减小的路径偏移。因此,从图1清楚地示出,余弦次级线圈9的半网格的振幅小于余弦次级线圈9的中心网格的振幅。相对于端部段7b的余弦次级线圈9的形状的这种修改允许平衡初级线圈7和余弦次级线圈9之间的耦合。如在本申请的序言中所提到的,只有当初级线圈产生的磁场在时间上恒定并且在次级线圈的整个区域内均匀时,才可以通过正弦形状的次级线圈获得正弦信号,而由初级线圈7产生的磁场,特别是在其端部处产生的磁场不是这种情况。减小余弦线圈9的端部处的两个半网格的振幅,有利于中心网格,这允许平衡每个网格的贡献,从而减小测量偏移。
38.根据第二实施例,耦合平衡系统包括至少一个补偿电容器,其安装在初级线圈7和次级线圈8、9之间。图2a至2c示出了通过测量偏移的电容耦合进行的补偿。这些图示出了安装在初级线圈7上的谐振电容器cres。
39.因此,至少一个补偿电容器c1、c2安装在初级线圈7和次级线圈8、9之间。补偿电容器的电容值通过迭代测试来确定。在图2a所示的示例中,补偿电容器c1安装在初级线圈7与余弦次级线圈9之间,而在图2b所示的示例中,补偿电容器c1也安装在初级线圈7与余弦次级线圈9之间,但补偿方式相反。在图2c所示的示例中,第一补偿电容器c1安装在初级线圈7和余弦次级线圈9之间,第二补偿电容器c2安装在初级线圈7和正弦次级线圈8之间。
40.根据第三实施例,通过调节次级线圈8、9的形状,以确保位于端部段7b处的线圈的形状减小来产生耦合平衡系统。因此,次级线圈8、9的正弦函数和余弦函数的形状朝向初级线圈7的端部段7b减小。
41.对于线性路径,正弦次级线圈8的向外轨道8a和返回轨道8r的形状通过以下公式描述:youtward(x)=ymoy_outward+e(x)*(a1*sin(a*x+φ1)+a2*sin(2*a*x+φ2)+a3*sin(3*a*x+φ3)
…
+an*sin(n*a*x+φn));yreturn(x)=ymoy_return+e(x)*(
‑
a1*sin(a*x+φ1)
‑
a2*sin(2*a*x+φ2)
‑
a3*sin(3*a*x+φ3)
…‑
an*sin(n*a*x+φn));以及余弦次级线圈9的向外轨道9a和返回轨道9r的形状通过以下公式描述:youtward(x)=ymoy_outward+e(x)*(a1*cos(a*x+φ1)+a2*cos(2*a*x+φ2)+a3*
cos(3*a*x+φ3)
…
+an*cos(n*a*x+φn));yreturn(x)=ymoy_return+e(x)*(
‑
a1*cos(a*x+φ1)
‑
a2*cos(2*a*x+φ2)
‑
a3*cos(3*a*x+φ3)
…‑
an*cos(n*a*x+φn));其中,
·
x,y,沿着移动体的路径f并沿垂直于该路径且平行于目标件的位移平面的方向考虑的笛卡尔坐标系中的笛卡尔坐标,
·
e(x),包裹函数;
·
a1,轨道基波分量的振幅;
·
a2至an,轨道谐波分量的振幅,其中,n小于5;
·
a,比例因子,使得可以将次级线圈的周期适于要被测量的行程;
·
φ1,轨道基波分量的相位;
·
φ2至φn,轨道谐波分量的相位;
·
y
moy_outward
和y
moy_return
,分别是向外轨道和返回轨道的等分线的y坐标。
42.根据有利的变型,次级线圈的坐标y
moy_outward
和y
moy_return
是不同的,使得次级线圈的向外轨道相对于所述次级线圈的返回轨道偏移。
43.包裹函数e(x)是正弦函数和余弦函数的调节函数,允许次级线圈的轨道的形状朝向端部段7b减小。
44.通常,包裹函数e(x)是常数k和与次级线圈的基波分量相同周期的正弦调节函数的和的结果,例如:
·
对于xstart≤x≤xend,e(x)=k+m*sin(a*x+φ
m
);
·
对于x≤xstart,e(x)=0;
·
对于x≥xend,e(x)=0;其中,xstart和xend分别限定了次级线圈8、9占据的扇区的起点和终点。
45.有利地,选择正弦调节函数的相位φ
m
,使得包裹函数e(x)在初级线圈7的中心处具有最大值。
46.包裹函数e(x)的另一个有利配置是梯形函数,如图3所示。在这种情况下,可以将包裹函数描述为使得对于x≤xstart,其为零,然后在第一部分上线性增加,随后的部分在最后一部分之前都是恒定的,在最后部分线性减少直到xend,然后对于x≥xend,包裹函数再次为零。
47.有利地选择函数的不同部分的分布,使得包裹函数减弱最靠近端部7b的网格的贡献。
48.图4是次级线圈8、9的示例性实施例,次级线圈8、9的形状包括2次谐波。正弦形次级线圈8向外轨道8a和返回轨道8r组成,向外轨道8a和返回轨道8r形成第一网格和第二网格,第一网格和第二网格位于初级线圈7的端部段7b附近的形状被衰减,以在次级线圈的整个区域上补偿磁场的非均匀性的影响。余弦形的次级线圈9由向外轨道9a和返回轨道9r组成,向外轨道9a和返回轨道9r形成第一半网格、完整网格和第二半网格,使得位于初级线圈7的端部段7b附近的每个半网格具有衰减的形状,以在次级线圈的整个区域上补偿磁场的非均匀性的影响。余弦次级线圈9的向外轨道9a和返回轨道9r在其端部处通过连接轨道9l连接,该连接轨道9l垂直于路径f延伸。
49.根据有利的变型,包裹函数e(x)在初级线圈7的中心处具有最大值。
50.当然,平衡系统的该第三实施例也可以与第二实施例结合实现。
51.图5示出了第三实施例对目标件3的围绕中心c旋转的角路径f的适应。根据该示例,次级线圈8、9布置成具有例如由期望被测量的角度限制的角宽度的圆环部分的形状。
52.图5通过示例的方式示出了次级线圈8、9的形状,其确保位于端部段7b处的线圈的形状的减小,如图4所示。正弦次级线圈8的向外轨道8a的形状和返回轨道8r的形状通过以下公式描述:youtward(θ)=ymoy_outward+e(θ)*(a1*sin(a*θ+φ1)+a2*sin(2*a*θ+φ2)+a3*sin(3*a*θ+φ3)
…
+an*sin(n*a*θ+φn));yreturn(θ)=ymoy_return+e(θ)*(
‑
a1*sin(a*θ+φ1)
‑
a2*sin(2*a*θ+φ2)
‑
a3*sin(3*a*θ+φ3)
…‑
an*sin(n*a*θ+φn))。
53.余弦次级线圈9的向外轨道9a的形状和返回轨道9r的形状通过以下公式描述:youtward(θ)=ymoy_outward+e(θ)*(a1*cos(a*θ+φ1)+a2*cos(2*a*θ+φ2)+a3*cos(3*a*θ+φ3)
…
+an*cos(n*a*θ+φn));yreturn(θ)=ymoy_return+e(θ)*(
‑
a1*cos(a*θ+φ1)
‑
a2*cos(2*a*θ+φ2)
‑
a3*cos(3*a*θ+φ3)
…‑
an*cos(n*a*θ+φn));其中,
·
θ,其中心与目标件3的旋转轴c相对应的极坐标系中的角坐标;
·
a,比例因子,使得可以将次级线圈的周期适于要测量的行程;
·
y
moy_outward
和y
moy_return
分别是向外轨道和返回轨道的等分半径;
·
e(θ),包裹函数。
54.根据有利的变型,包裹函数e(θ)在初级线圈7的中心处具有最大值。
55.本发明不限于所描述和表示的示例,因为在不脱离其范围的情况下可以对其进行各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1