测位装置、测位系统、移动终端及测位方法与流程
1.本发明涉及使用从多个信号发送源发送的信号波来计测位置信息的测位技术。
背景技术:
2.全球导航卫星系统(global navigation satellite system,gnss)是gps(global positioning system)、伽利略(galileo)以及准天顶卫星系统(quasi
‑
zenith satellite system,qzss)这样的卫星测位系统的总称。如果利用全球导航卫星系统(以下称为“gnss”。),能够基于从地球的卫星轨道上的多个测位卫星接收到的无线信号来计测位置信息。为了在难以从测位卫星接收无线信号的环境下(例如室内空间及地下空间)进行测位,需要代替gnss的测位技术。
3.作为gnss以外的测位技术,已知有使用无线lan(wireless local area network:无线局域网)中的多个接入点或者分别发送电波或非可听声的多个信标这样的多个信号源的测位技术。这里,该多个信号源的位置被用作已知信息。例如,基于到来时刻(time of arrival,toa)方式的测位系统是这样的测位系统:基于从该多个信号源传播至接收终端的信号波的到来时刻的计测值来计测接收终端与多个信号源之间的距离,基于该计测到的距离估计接收终端的位置信息。但是,为了得到高测位精度,需要接收终端与多个信号源之间的高精度的时刻同步,因此,存在导致测位系统的高成本化这样的问题。
4.针对这样的问题,在专利文献1(国际公开第2014/192893号)中公开了一种不需要接收终端与多个信号源之间的时刻同步的测位系统。专利文献1所公开的测位系统具备:用户持有的便携终端(接收终端);在配置于室内空间的状态下向便携终端发送非可听声的多个信标(信号源);配置于该室内空间的固定接收器;以及能够经由通信网络而与固定接收器及便携终端进行通信的服务器。根据该测位系统,便携终端从存在于附近的固定接收器取得该固定接收器的接收器id,向服务器发送该接收器id,由此,从服务器取得与多个信标各自的非可听声的发送定时相关的辅助信息。接着,便携终端从多个信标接收非可听声,基于该非可听声和辅助信息,计算便携终端的计时器与固定接收器的计时器之间的误差δ。之后,便携终端再次从多个信标接收非可听声,能够使用该非可听声的接收时刻和误差δ来计测便携终端的位置信息。
5.现有技术文献
6.专利文献
7.专利文献1:国际公开第2014/192893号(例如参照图1、4、5及段落[0043]~[0048]、[0050]~[0053]、[0058])
技术实现要素:
[0008]
发明要解决的问题
[0009]
但是,在专利文献1所公开的测位系统中,需要将向便携终端发送接收器id的固定接收器预先设置于室内空间、并且预先准备向该室内空间中的便携终端提供辅助信息的服
务器,因此,存在测位系统的构筑成本增加这样的问题。此外,在无法从服务器接收辅助信息的通信环境下,难以高精度地计测便携终端的位置信息。
[0010]
基于上述情况,本发明的目的在于,提供一种能够将测位系统的构筑成本抑制得较低、并且即便在无法使用gnss的环境下也能够计测高精度的位置信息的测位装置、测位系统、移动终端及测位方法。
[0011]
用于解决问题的手段
[0012]
本发明的一方案的测位装置是与信号接收器协作而进行动作的测位装置,该信号接收器接收从具有相互同步地进行动作的多个信号发送器的至少1个同步发送部到来的多个信号波,其特征在于,所述测位装置具备:到来时刻检测部,其基于从所述信号接收器输出的接收信号,检测所述多个信号波各自的到来时刻;距离差计算部,其基于检测到的该到来时刻之差,计算从所述多个信号发送器到所述信号接收器的距离之差作为观测值的组;以及测位运算部,其执行基于使用了表示该观测值的组的观测向量和所述多个信号发送器的已知的位置信息的非线性卡尔曼滤波器的测位运算,由此计算表示所述信号接收器的位置信息的估计状态向量。
[0013]
发明的效果
[0014]
根据本发明的一方案,即便在无法使用gnss的环境下,也能够计测高精度的位置信息,并且能够将测位系统的构筑成本抑制得较低。
附图说明
[0015]
图1是示出本发明的实施方式1的测位系统的概要结构的功能框图。
[0016]
图2是示出实施方式1的变形例的同步发送部的概要结构的功能框图。
[0017]
图3是示出实施方式1中的测位装置的概要结构的功能框图。
[0018]
图4是示出实施方式1中的测位装置的硬件结构例的概要结构的功能框图。
[0019]
图5是概要地示出实施方式1的测位处理的步骤的一例的流程图。
[0020]
图6是概要地示出实施方式1的测位处理的步骤的一例的流程图。
[0021]
图7a及图7b是示出实施方式1的相关处理部的输出信号的波形的例子的概要图。
[0022]
图8是示出移动终端的航迹(估计状态向量)的转变的例子的图。
[0023]
图9是示出本发明的实施方式2中的测位装置的概要结构的功能框图。
[0024]
图10是概要地示出实施方式2的测位处理的步骤的一例的流程图。
具体实施方式
[0025]
以下,参照附图对本发明的各种实施方式详细进行说明。另外,在附图整体中标注有相同标号的结构要素具有相同结构及相同功能。
[0026]
实施方式1.
[0027]
图1是示出本发明的实施方式1的测位系统的概要结构的功能框图。图1所示的测位系统构成为具备信号发送系统1及移动终端2。信号发送系统1配置在无法使用gnss执行测位的室内空间或地下空间等测位空间is内。信号发送系统1即便在这样的测位空间is内也能够高精度地计测移动终端2的位置信息。
[0028]
信号发送系统1具有发送测位用的多个信号波的n个同步发送部121、
…
、12
n
、以及
将该多个信号波的发送所需的发送信息向同步发送部121、
…
、12
n
供给的发送信息供给部11。这里,n为2以上的整数。同步发送部121、
…
、12
n
全部具有相同结构。
[0029]
第n个同步发送部12
n
具有m个信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
和使该m个信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
相互同步地动作的时刻同步部14
n
。这里,n是表示同步发送部12
n
的编号的1~n的范围内的任意的整数,m是表示信号发送器tx
n,1
~tx
n,m
的个数的3以上的整数。发送信息供给部11向信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
分别供给控制信号d
n,1
、
…
、d
n,m
,该控制信号d
n,1
、
…
、d
n,m
指定应从信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
分别发送的信号波的波形图案。信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
相互同步地进行动作,能够在由同步发送部12
n
指定的发送定时发送具有由控制信号d
n,1
、
…
、d
n,m
指定的波形图案的信号波w
n,1
、w
n,2
、
…
、w
n,m
(例如无线电波或者非可听频段的声波)。
[0030]
在本实施方式中,通过时刻同步部14
n
来实现信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
之间的时刻同步。与此相对,同步发送部121、
…
、12
n
之间的时刻同步并不是必须的。
[0031]
能够将这样的同步发送部12
n
例如组入立体声音乐播放器等声音输出装置来使用。
[0032]
另外,本实施方式的发送信息供给部11是与同步发送部121、
…
、12
n
不同的结构要素,但不限于此。图2是示出实施方式1的变形例的同步发送部13
n
的概要结构的功能框图。同步发送部13
n
具有信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
、以及将指定波形图案的控制信号d
n,1
、
…
、d
n,m
分别向信号发送器tx
n,1
、tx
n,2
、
…
、tx
n,m
供给的发送信息供给部11
n
。代替图1所示的同步发送部12
n
,也可以使用图2所示的同步发送部13
n
。
[0033]
接着,参照图1的话,移动终端2具备:接收从信号发送系统1中的同步发送部121、
…
、12
n
到来的信号波w
1,1
~w
1,m
、
…
、w
n,1
~w
n,m
的信号接收器rx;与该信号接收器rx协作而进行动作的测位装置31、以及发送信息供给部30。发送信息供给部30向测位装置31供给同步发送部121、
…
、12
n
的已知的位置信息、以及为了检测到来时刻而应该使用的参照信号。作为移动终端2,例如能够使用智能手机等移动体通信终端、或者平板终端等数字通信设备。
[0034]
另外,在本实施方式中,发送信息供给部30是与测位装置31不同的结构要素,但不限于此。发送信息供给部30也可以组入到测位装置31。
[0035]
信号接收器rx具有:检测从同步发送部121、
…
、12
n
到来的信号波w
1,1
~w
1,m
、
…
、w
n,1
~w
n,m
的接收传感器21;以及针对从接收传感器21输出的模拟接收信号实施放大等模拟信号处理及模拟
‑
数字转换而生成数字接收信号的接收信号处理部22。在从同步发送部121、
…
、12
n
输出非可听频段的声波的情况下,信号接收器rx的接收传感器21例如由在该非可听频段具有灵敏度的麦克风构成即可。从接收信号处理部22输出的数字接收信号(以下仅称为“接收信号”。)被赋给测位装置31。
[0036]
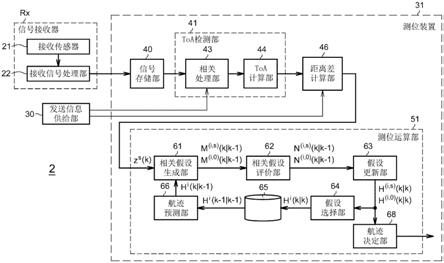
接着,参照图3对测位装置31的结构进行说明。图3是示出实施方式1中的测位装置31的概要结构的功能框图。
[0037]
如图3所示,测位装置31具备:暂时存储从信号接收器rx输出的接收信号的信号存储部40;基于从信号存储部40读出的接收信号,按照每个同步发送部12
n
对从信号发送器tx
n,1
~tx
n,m
到来的多个信号波各自的到来时刻进行检测的到来时刻(toa)检测部41;基于该检测到的到来时刻之差,按照每个同步发送部12
n
计算从信号发送器tx
n,1
~tx
n,m
到信号
circuit:专用集成电路)或者fpga(field
‑
programmable gate array:现场可编程门阵列)等半导体集成电路的单个或多个处理器实现。或者,测位装置31的全部功能或一部分功能也可以由包含执行软件或固件的程序代码的cpu(central processing unit:中央处理单元)或gpu(graphics processing unit:图形处理单元)等运算装置的单个或多个处理器实现。或者,也能够通过包含dsp、asic或fpga等半导体集成电路与cpu或gpu等运算装置的组合的单个或多个处理器来实现测位装置31的全部功能或一部分功能。
[0050]
图4是示出作为实施方式1中的测位装置31的硬件结构例的信号处理电路70的概要结构的功能框图。图4所示的信号处理电路70具备处理器71、输入输出接口74、存储器72、存储装置73及信号路75。信号路75是用于将处理器71、输入输出接口74、存储器72及存储装置73相互连接的总线。输入输出接口74具有将从信号接收器rx输入的信号向处理器71转送的功能,并且具有将从处理器71转送的航迹数据向外部输出的功能。
[0051]
存储器72包含在处理器71执行数字信号处理时使用的工作存储器、以及供在该数字信号处理中使用的数据展开的临时存储器。例如,存储器72由闪存及sdram等半导体存储器构成即可。存储器72能够用作图3的信号存储部40及假设保存部65。此外,存储装置73在处理器71包含cpu或gpu等运算装置的情况下,能够用作存储应由该运算装置执行的软件或固件的程序代码的存储区域。例如,存储装置73由闪存或rom(read only memory:只读存储器)等非易失性的半导体存储器构成即可。
[0052]
另外,在图4的例子中,处理器71的个数为1个,但不限于此。也可以使用相互协作而进行动作的多个处理器来实现测位装置31的硬件结构。
[0053]
接着,参照图5及图6对上述的测位装置31的结构及动作进行说明。图5及图6是概要地示出实施方式1的测位处理的步骤的一例的流程图。图5及图6所示的流程图经由结合符c1、c2而相互结合。
[0054]
首先,在测位装置31中,将表示当前时刻t
k
的编号k设定为1(步骤st1)。接着,toa检测部41从同步发送部121、
…
、12
n
中选择1个同步发送部12
n
(步骤st11),分别检测从该同步发送部12
n
内的信号发送器tx
n,1
~tx
n,m
传播到信号接收器rx的信号波w
n,1
~w
n,m
的到来时刻(步骤st12)。
[0055]
具体而言,如上所述,相关处理部43执行从发送信息供给部30供给的参照信号与从信号存储部40读出的接收信号之间的相关处理。toa计算部44通过对相关处理部43的输出信号的振幅或功率与阈值th进行比较,能够检测出现在该输出信号中的波峰,并计算与该检测到的波峰分别对应的到来时刻。在不存在信号波间的干扰的情况下,如图7a的例子所示,相关处理部43的输出信号波形pa不失真。因此,阈值th例如基于由噪音引起的误检测概率决定即可。
[0056]
另一方面,在产生信号波间的干扰的情况下,如图7b的例子所示,有时产生输出信号波形pf是由信号波引起、输出信号波形pb不是由信号波引起的状况。在设想了这样的状况的情况下,toa计算部44可能检测到伪波峰。对此,为了防止检测到伪波峰,toa计算部44期望基于多个波峰中的具有最大振幅的波峰以外的波峰来设定阈值。在图7b的情况下,toa计算部44能够将阈值th设定为如下值:该值小于输出信号波形pf、pb的波峰中的输出信号波形pf的波峰(具有最大振幅的波峰)的振幅且超过输出信号波形pb的伪波峰的振幅。由此,能够避免检测到伪波峰。
[0057]
但是,在图7b的例子中,假设在设想了输出信号波形pb是由信号波引起、输出信号波形pf不是由信号波引起的状况的情况下,toa计算部44检测并使用出现在输出信号波形中的全部的波峰即可。
[0058]
在图5的步骤st12之后,在未选择全部的同步发送部121、
…
、12
n
的情况下(步骤st13的“否”),toa检测部41从剩余的同步发送部中选择1个同步发送部12
n
(步骤st14)。之后,执行步骤st12。
[0059]
之后,在选择了全部的同步发送部121、
…
、12
n
的情况下(步骤st13的“是”),如上所述,距离差计算部46取得由toa检测部41检测到的到来时刻,按照每个同步发送部12
n
来计算基于到来时刻差的距离差(步骤st21)。此时,距离差计算部46将以该计算出的距离差为要素的观测向量向测位运算部51供给。
[0060]
测位运算部51使用从距离差计算部46供给的观测向量z
s
(k)(s=1、2、
…
),按照图6所示的步骤执行基于非线性卡尔曼滤波器的测位运算(步骤st31~st40)。以下,作为非线性卡尔曼滤波器的例子,对扩展卡尔曼滤波器(extended kalman filter,ekf)进行说明,但不限于此。
[0061]
此时,由下式(3.1)给出作为目标的信号接收器rx(移动终端2)的运动模型,由下式(3.2)给出观测模型。
[0062]
φ(k)=f(φ(k
‑
1))+w(k
‑
1)
ꢀꢀꢀꢀ
(3.1)
[0063]
z
s
(k)=h(φ(k))+v(k)
ꢀꢀꢀꢀ
(3.2)
[0064]
这里,φ(k)是时刻t
k
的目标的状态向量,f()、h()分别是非线性函数向量。w(k
‑
1)是表示目标的运动速度的模糊性的系统噪音向量,系统噪音向量w(k
‑
1)的平均值为0,其协方差矩阵为q
k
。此外,v(k)是观测噪音向量,观测噪音向量v(k)的平均值为0,其协方差矩阵为r
k
。
[0065]
目标的状态向量φ(k)例如如下式(4)所示那样是将三维位置成分x(k)、y(k)、z(k)及速度成分dx(k)/dt、dy(k)/dt、dz(k)/dt作为要素的六维向量。
[0066][0067]
这里,上标t是表示转置的记号。
[0068]
例如,如果将目标的运动近似为等速直线运动,则式(3.1)能够如下式(5)那样表现。
[0069]
φ(k)=f
k
·
φ(k
‑
1)+w(k
‑
1)
ꢀꢀꢀꢀ
(5)
[0070]
式(5)中的f
k
能够由下式(6)所示的6行6列的矩阵表现。
[0071][0072]
这里,τ
k
是采样间隔(=t
k
‑
t
k
‑1),i3×3是3行3列的单位矩阵。
[0073]
系统噪音向量w(k)的协方差矩阵q
k
如下式(7)所示(q是系统噪音的功率谱密度,是固定值)。
[0074]
[0075]
此时,将表示过去的时刻t
k
‑1的目标的估计状态的估计状态向量表示为的目标的估计状态的估计状态向量表示为将与此对应的估计误差协方差矩阵表示为p
i
(k
‑
1|k
‑
1)。上标i是表示估计状态向量的编号的1以上的整数。此时,如下式(8)那样定义时刻t
k
‑1的第i个假设h
i
(k
‑
1|k
‑
1)。
[0076]
h
i
(k
‑
1|k
‑
1)={c
i
(k
‑
1),φ
i
(k
‑
1|k
‑
1),p
i
(k
‑
1|k
‑
1)}
ꢀꢀꢀꢀ
(8)
[0077]
这里,c
i
(k
‑
1)是表示假设h
i
(k
‑
1|k
‑
1)的合理性的评价值。式(8)的假设h
i
(k
‑
1|k
‑
1)是估计状态向量估计误差协方差矩阵p
i
(k
‑
1|k
‑
1)及评价值c
i
(k
‑
1)的组合。
[0078]
在假设保存部65中,存储有相对于当前时刻t
k
的过去的时刻t
k
‑1的假设h
i
(k
‑
1|k
‑
1)。但是,时刻t0的假设h
i
(0|0)被作为初始参数给出。
[0079]
参照图6的话,在步骤st31中,航迹预测部66从假设保存部65取得时刻t
k
‑1中的假设h
i
(k
‑
1|k
‑
1)。接着,航迹预测部66针对所有的编号i,使用假设h
i
(k
‑
1|k
‑
1)来计算当前时刻t
k
的预测状态向量(事前状态估计向量)及预测误差协方差矩阵p
i
(k|k
‑
1)(步骤st32)。
[0080]
具体而言,航迹预测部66能够计算下式(9)所示的预测状态向量
[0081]
φ
i
(k|k
‑
1)=f(φ
i
(k
‑
1|k
‑
1))
ꢀꢀꢀꢀ
(9)此外,航迹预测部66能够计算下式(10)所示的预测误差协方差矩阵p
i
(k
‑
1|k
‑
1)。
[0082][0083]
式(10)中的f
k
‑1是下式(11)所示的偏微分矩阵(雅可比)。
[0084][0085]
在步骤st32之后,航迹预测部66使用在步骤st32中计算出的预测状态向量在步骤st32之后,航迹预测部66使用在步骤st32中计算出的预测状态向量及预测误差协方差矩阵p
i
(k
‑
1|k
‑
1),生成下式(12)所示的预测假设h
i
(k|k
‑
1)(步骤st33)。
[0086]
h
i
(k|k
‑
1)={c
i
(k
‑
1),φ
i
(k|k
‑
1),p
i
(k|k
‑
1)}
ꢀꢀꢀꢀ
(12)
[0087]
式(12)的预测假设h
i
(k|k
‑
1)是预测状态向量预测误差协方差矩阵p
i
(k|k
‑
1)及评价值c
i
(k
‑
1)的组合。接着,相关假设生成部61使用观测向量z
s
(k)及预测假设h
i
(k|k
‑
1),计算下式(13.1)、(13.2)所示的两种相关假设m
(i,s)
(k|k
‑
1)、m
(i,0)
(k|k
‑
1)(步骤st34)。
[0088]
m
(i,s)
(k|k
‑
1)={c
i
(k
‑
1),φ
i
(k|k
‑
1),p
i
(k|k
‑
1),z
s
(k)}
ꢀꢀꢀꢀ
(13.1)
[0089]
m
(i,0)
(k|k
‑
1)={c
i
(k
‑
1),φ
i
(k|k
‑
1),p
i
(k|k
‑
1),z0(k)}
ꢀꢀꢀꢀ
(13.2)
[0090]
这里,z0(k)是方便地示出未分配观测向量z
s
(k)(s=1、2、
…
)的符号。式(13.1)的相关假设m
(i,s)
(k|k
‑
1)是预测状态向量预测误差协方差矩阵p
i
(k|k
‑
1)、评价值c
i
(k
‑
1)及被分配的观测向量z
s
(k)的组合,式(13.2)的相关假设m
(i,0)
(k|k
‑
1)是预测状态向量预测误差协方差矩阵p
i
(k|k
‑
1)、评价值c
i
(k
‑
1)及符号z0(k)的组合。
[0091]
接着,相关假设评价部62针对(i,s)的全部组合,计算相关假设m
(i,s)
(k|k
‑
1)、m
(i,0)
(k|k
‑
1)的新的评价值c
i
(k)、d
i
(k),更新相关假设m
(i,s)
(k|k
‑
1)、m
(i,0)
(k|k
‑
1)(步骤st35)。
[0092]
具体而言,例如,能够基于下式(14.1)、(14.2)计算新的评价值c
i
(k)、d
i
(k)。
[0093]
c
i
(k)=c
i
(k
‑
1)
×
g
i
(k)
×
p
d
ꢀꢀꢀꢀ
(14.1)
[0094]
d
i
(k)=c
i
(k
‑
1)
×
β
ft
×
(1
‑
p
d
)
ꢀꢀꢀꢀ
(14.2)
[0095]
这里,g
i
(k)是航迹的似然度,p
d
是检测概率,β
ft
是预先设定的误检测发生率。
[0096]
更新后的相关假设n
(i,s)
(k|k
‑
1)、n
(i,0)
(k|k
‑
1)由下式(15.1)、(15.2)表示。
[0097]
n
(i,s)
(k|k
‑
1)={c
i
(k),φ
i
(k|k
‑
1),p
i
(k|k
‑
1),z
s
(k)}
ꢀꢀꢀꢀ
(15.1)
[0098]
n
(i,0)
(k|k
‑
1)={d
i
(k),φ
i
(k|k
‑
1),p
i
(k|k
‑
1),z0(k)}
ꢀꢀꢀꢀ
(15.2)
[0099]
这里,更新后的相关假设n
(i,s)
(k|k
‑
1)是预测状态向量预测误差协方差矩阵p
i
(k|k
‑
1)、被分配的观测向量z
s
(k)及更新后的评价值c
i
(k)的组合,更新后的相关假设n
(i,0)
(k|k
‑
1)是预测状态向量预测误差协方差矩阵p
i
(k|k
‑
1)、符号z0(k)及更新后的评价值d
i
(k)的组合。
[0100]
接着,假设更新部63针对(i,s)的全部组合,使用更新后的相关假设n
(i,s)
(k|k
‑
1)、n
(i,0)
(k|k
‑
1),计算当前时刻t
k
的估计状态向量的估计状态向量及估计误差协方差矩阵p
(i,s)
(k|k)、p
(i,0)
(k|k)(步骤st36)。
[0101]
具体而言,能够基于下式(16.1)、(16.2)计算估计状态向量具体而言,能够基于下式(16.1)、(16.2)计算估计状态向量
[0102][0103]
φ
(i,0)
(k|k)=φ
i
(k|k
‑
1)
ꢀꢀꢀꢀ
(16.2)
[0104]
这里,k
ki
是扩展卡尔曼增益矩阵,h
k
是偏微分矩阵(雅可比)。扩展卡尔曼增益矩阵k
ki
由下式(17)表现。
[0105][0106]
此外,偏微分矩阵h
k
由下式(18)表现。
[0107][0108]
此外,能够通过下式(19.1)、(19.2)来计算估计误差协方差矩阵p
(i,s)
(k|k)、p
(i,0)
(k|k)。
[0109][0110]
p
(i,0)
(k|k)=p
i
(k|k
‑
1)
ꢀꢀꢀꢀ
(19.2)
[0111]
在步骤st36之后,假设更新部63使用在步骤st36中计算出的估计状态向量φ
(i,s)
(k|k)、φ
(i,0)
(k|k)及估计误差协方差矩阵p
(i,s)
(k|k)、p
(i,0)
(k|k),计算下式(20.1)、(20.2)所示的当前时刻t
k
的假设候选h
(i,s)
(k|k)、h
(i,0)
(k|k)(步骤st37)。
[0112]
h
(i,s)
(k|k)={c
i
(k),φ
(i,s)
(k|k),p
(i,s)
(k|k)}
ꢀꢀꢀꢀ
(20.1)
[0113]
h
(i,0)
(k|k)={d
i
(k),φ
(i,0)
(k|k),p
(i,0)
(k|k)}
ꢀꢀꢀꢀ
(20.2)
[0114]
这里,假设候选h
(i,s)
(k|k)是估计状态向量φ
(i,s)
(k|k)、估计误差协方差矩阵p
(i,s)
(k|k)及评价值c
i
(k)的组合,假设候选h
(i,0)
(k|k)是估计状态向量φ
(i,0)
(k|k)、估计误差协方差矩阵p
(i,0)
(k|k)及评价值d
i
(k)的组合。
[0115]
在步骤st37之后,假设选择部64从当前时刻t
k
的假设候选h
(i,s)
(k|k)、h
(i,0)
(k|k)
中,至少选择1个具有比较高的评价值的假设候选(步骤st39),将该选择出的假设候选作为时刻t
k
的假设h
i
(k|k)存储于假设保存部65(步骤st39)。这里,假设h
i
(k|k)的上标i是重新分配(重新编号)的编号,是1以上的整数。
[0116]
另一方面,航迹决定部68将在步骤st37中生成的当前时刻t
k
的假设候选h
(i,s)
(k|k)、h
(i,0)
(k|k)中的、具有最高的评价值的假设候选的航迹(估计状态向量)决定为当前时刻t
k
的航迹(步骤st40)。该决定出的航迹的数据(航迹数据)被输出到外部。
[0117]
在步骤st40之后,测位运算部51判定是否继续进行测位运算(步骤st41),在判定为继续进行测位运算的情况下(步骤st41的“是”),将时刻编号k加1(步骤st42),将测位处理返回到图5的步骤st11。另一方面,在判定为不继续进行测位运算的情况下(步骤st41的“否”),测位运算部51结束测位处理。
[0118]
如以上说明的那样,根据实施方式1,测位运算部51基于使用了观测向量z
s
(k)和信号发送器tx
n,1
~tx
n,m
的已知的位置信息的非线性卡尔曼滤波器执行测位运算,由此,能够计算表示目标的位置信息的估计状态向量因此,即便在无法使用gnss的测位空间is中也能够计测高精度的位置信息。图8是示出目标的航迹(估计状态向量)的转变的例子的图。如图8所示,即便时刻t
k
‑2的航迹在时刻t
k
‑1被分支为多个航迹由于相关假设的评价值由各时刻的似然度的累积构成,因此也期待包含合理的航迹的相关假设的评价值渐渐变高。因此,如图8所示,即便航迹基于真波峰而被生成的、且航迹基于伪波峰而生成的,在时刻t
k
,假设选择部64也能够不选择似然度低的航迹而选择似然度高的航迹因此,在本实施方式中,与现有技术相比,目标的位置估计性能提高。
[0119]
此外,在本实施方式中,无需专利文献1所公开的提供辅助信息的服务器,因此,能够将测位系统的构筑成本抑制得较低。此外,距离差计算部46按照每个同步发送部12
n
来计算表示距离差的组的观测向量,测位运算部51使用该观测向量,执行基于非线性卡尔曼滤波器的测位运算,因此,即便没有进行同步发送部121、
…
、12
n
之间的时刻同步,也能够计算高精度的估计状态向量因此,能够削减同步发送部121、
…
、12
n
之间的时刻同步所需的成本,因此,能够将测位系统的构筑成本抑制得较低。
[0120]
实施方式2.
[0121]
接着,对本发明的实施方式2进行说明。图9是示出本发明的实施方式2的移动终端3的概要结构的功能框图。如图9所示,移动终端3构成为具备信号接收器rx、发送信息供给部30及测位装置32,测位装置32具有信号存储部40、到来时刻(toa)检测部42、距离差计算部46及测位运算部(追尾处理部)52。本实施方式的测位系统的结构除了代替图3的toa检测部41而具有图9的toa检测部42、并且代替图3的航迹预测部66而具有图9的航迹预测部67这一点之外,与实施方式1的测位系统的结构相同。另外,作为移动终端3,例如能够使用智能手机等移动体通信终端、或者平板终端等数字通信设备。
[0122]
本实施方式的toa检测部42具备相关处理部43、toa计算部44及最大似然估计部45。最大似然估计部45具有如下功能:按照每个同步发送部12
n
,通过执行基于最大似然估计法的处理(最大似然估计处理)来估计多个信号波各自的到来时刻。在无法忽视信号波间
的干扰的影响的情况下,toa计算部44计算精度低的到来时刻,或者无法计算构成观测向量z
i
(k)所需的到来时刻。即便在这样的情况下,最大似然估计部45也能够计算到来时刻的最大似然估计值。
[0123]
本实施方式的航迹预测部67具有与实施方式1的航迹预测部66相同的功能,此外,具有在执行测位运算之前计算当前时刻t
k
的目标(信号接收器rx)的预测状态向量的功能。最大似然估计部45能够利用预测状态向量所包含的预测位置来执行最大似然估计处理。
[0124]
参照图10,对实施方式2的测位装置32的动作进行说明。图10是概要地示出实施方式2的测位处理的步骤的一例的流程图。图10所示的流程图经由结合符c1、c2而与图6所示的流程图结合。
[0125]
参照图10,在步骤st1之后,航迹预测部67计算当前时刻t
k
的目标(信号接收器rx)的预测状态向量将预测状态向量向最大似然估计部45供给(步骤st2)。
[0126]
之后,toa检测部42与实施方式1的情况(图5)同样地执行步骤st11~st14。之后,最大似然估计部45判定是否执行最大似然估计处理(步骤st15)。例如,在由toa计算部44计算出的到来时刻的精度低的情况下、或者在无法计算构成观测向量z
i
(k)所需的到来时刻的情况下,最大似然估计部45执行最大似然估计处理即可(步骤st16~st17)。在判定为不执行最大似然估计处理的情况下(步骤st15的“否”),与实施方式1的情况(图5)同样地执行步骤st21。
[0127]
在判定为执行最大似然估计处理的情况下(步骤st15的“是”),最大似然估计部45从发送信息供给部30取得信号发送器tx
1,1
~tx
1,m
、
…
、tx
n,1
~tx
n,m
的已知的位置信息,使用该已知的位置信息和在步骤st2中计算出的信号接收器rx的预测位置,计算从信号发送器tx
1,1
~tx
1,m
、
…
、tx
n,1
~tx
n,m
传播到信号接收器rx的信号波各自的预测到来时刻t
p,1
、t
p,2
、
…
、t
p,i
(步骤st14)。这里,i是表示应被预测的到来时刻的个数的正整数。
[0128]
接着,最大似然估计部45从信号存储部40取得接收信号,并且,从发送信息供给部30取得参照信号,使用该接收信号和该参照信号,执行将预测到来时刻t
p,1
、t
p,2
、
…
、t
p,i
设为初始值的最大似然估计处理,由此计算到来时刻的最大似然估计值(步骤st17)。然后,距离差计算部46计算基于该到来时刻最大似然估计值的距离差(步骤st21)。之后,与实施方式1的情况(图6)同样地执行步骤st31。
[0129]
在步骤st17中,最大似然估计部45执行基于最速下降法、牛顿
‑
拉夫森(newton
‑
raphson)法或者拟牛顿法(bfgs法:broyden
‑
fletcher
‑
goldfarb
‑
shanno algorithm)这样的公知的最大似然估计算法的重复计算,由此,如下式(21)所示,计算使与到来时刻向量t
toa
相关的似然度函数ω(t
toa
)最大化的到来时刻向量的最大似然估计量<t
toa
>即可。
[0130][0131]
式(21)中的到来时刻向量t
toa
由下式(22)表示。
[0132]
t
toa
=[t1,t2,...,t
i
]
ꢀꢀꢀꢀ
(22)
[0133]
这里,t1、t2、
…
、t
i
是与预测到来时刻t
p,1
、t
p,2
、
…
、t
p,i
分别对应的到来时刻的变量。
[0134]
例如,能够使用下式(23)所示的似然度函数ω(t
toa
)。
[0135][0136]
这里,σ2是噪音功率的方差,l是从信号存储部40取得的接收信号的样本数,w是将接收信号的样本值作为要素的l行1列的向量,a(t
toa
)是矩阵,s是向量,上标h是表示厄米共轭的记号。
[0137]
式(23)的矩阵a(t
toa
)例如由下式(24)表示。
[0138]
a(t
toa
)=[r1(t1),r2(t2),...,r
i
(t
i
)]
t
ꢀꢀꢀꢀ
(24)
[0139]
这里,r1(t1)、
…
、r
i
(t
i
)分别是从i个参照信号中的各个参照信号对l个样本值进行采样而得到的向量。矩阵a(t
toa
)成为l行i列的矩阵。
[0140]
此外,例如,式(23)的向量s在将第i个参照信号的振幅和初始相位分别表示为a
i
、η
i
时,由下式(25)表示。
[0141][0142]
如以上说明的那样,根据实施方式2,即便在toa计算部44计算出精度低的到来时刻的情况下、或者在无法计算构成观测向量z
i
(k)所需的到来时刻的情况下,最大似然估计部45也能够计算到来时刻的最大似然估计值。由此,能够提供可靠性高的测位系统。
[0143]
此外,在本实施方式中,最大似然估计部45执行将预测到来时刻t
p,1
、t
p,2
、
…
、t
p,i
用作初始值的最大似然估计处理(步骤st17),因此,能够缩短搜索到来时刻所需的时间,此外,也能够降低最大似然估计处理的运算量。
[0144]
另外,为了在将预测到来时刻t
p,1
、t
p,2
、
…
、t
p,i
设为初始值的情况下降低搜索结果成为局部解的可能性,最大似然估计部45也可以根据将预测到来时刻t
p,1
、t
p,2
、
…
、t
p,i
用作平均值的i个正态分布,对样本值进行多次采样,执行将该样本值用作初始值的最大似然估计处理。
[0145]
此外,上述的测位装置32的全部功能或一部分功能例如能够通过具有dsp、asic或fpga等半导体集成电路的单个或多个处理器来实现。或者,测位装置32的全部功能或一部分功能也可以通过包含执行软件或固件的程序代码的cpu或gpu等运算装置的单个或多个处理器来实现。或者,也能够通过包含dsp、asic或fpga等半导体集成电路与cpu或gpu等运算装置的组合的单个或多个处理器来实现测位装置32的全部功能或一部分功能。也可以通过图4所示的信号处理电路70来实现测位装置32的硬件结构。
[0146]
以上,参照附图对本发明的实施方式1、2进行了叙述,但实施方式1、2是本发明的例示,可以存在实施方式1、2以外的各种实施方式及它们的变形例。在本发明的范围内,能够进行实施方式1、2的自由组合、各实施方式的任意的结构要素的变形、或者各实施方式的任意的结构要素的省略。
[0147]
产业利用性
[0148]
本发明的测位装置、移动终端、测位系统及测位方法在无法使用gnss的环境下也能够计测高精度的位置信息,因此,例如适合用于利用室内空间或地下空间内的移动终端的测位信息的导航系统、以及将多种测位技术组合而进行利用的混合测位系统。
[0149]
标号说明
[0150]
is测位空间,1信号发送系统,2、3移动终端,11、11
n
发送信息供给部,121、
…
、12
n
、
13
n
同步发送部,tx
1,1
~tx
n,m
信号发送器,141、
…
、14
n
时刻同步部,rx信号接收器,21接收传感器,22接收信号处理部,30发送信息供给部,31、32测位装置,32测位装置,40信号存储部,41、42到来时刻(toa)检测部,43相关处理部,44到来时刻(toa)计算部,45最大似然估计部,46距离差计算部,51、52测位运算部(追尾处理部),61相关假设生成部,62相关假设评价部,63假设更新部,64假设选择部,65假设保存部,66、67航迹预测部,68航迹决定部,70信号处理电路,71处理器,72存储器,73存储装置,74输入输出接口,75信号路。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1