一种风电机组塔筒倾斜角的检测方法及测量装置与流程
[0001]
本发明涉及风电机组塔筒技术领域,具体涉及一种风电机组塔筒倾斜角的检测方法及检测设备。
背景技术:
[0002]
风力发电机组通常由上部的机舱、叶片,中部的钢结构塔筒1和下部的钢筋混凝土基础4组成(图1)。钢结构塔筒与钢筋混凝土基础的联结有多种形式,包括基础环安装和锚栓安装,无论采用哪种形式安装,在风机运行过程中,塔筒会发生摆动和扭转,塔筒底部(即塔基)需要承受塔筒上部传递过来的往复弯矩和扭矩,使得与塔基连接的基底(与钢筋混凝土联结的部分)需要承受塔筒上部传递过来的往复弯矩和扭矩,在这种往复荷载的长期作用下,钢筋混凝土基础由于不均匀沉降或局部破损会导致基底发生倾斜,进而导致塔筒倾斜。风机顶端的偏移量可达塔基偏移量的h/d倍,其中,h为风机轮毂高度,d为塔基直径,例如h=80m,d=4m,则为20倍,风机塔筒倾斜过大会导致风机发生安全事故,因此需要对塔基的倾斜角度定期检测,以了解风机的安全状况,以避免发生风机事故。
[0003]
目前工程中采用全站仪、水准仪等光学仪器进行测量,但现有的测量方式均存在以下不足:1)测量时需要根据现场的视线遮挡情况确定圆环标高面上测点的位置,并确定各测点之间的空间关系,比如确定测点之间的夹角或距离等,再根据各测点的数据计算出圆环标高面的倾角,而测点的布置过程耗时费力,大大降低了测量效率;2)光学测量仪器需要对焦、读数,这个过程易受到测量人员的主观影响。
技术实现要素:
[0004]
针对现有技术中存在的上述技术问题,本发明的目的之一在于提供一种风电机组塔筒倾斜角的检测方法,通过该方法,可精确测量计算所述塔筒的倾斜角度,减少测量误差,而且可提高测量效率,减少测量人员对测量结果的影响。
[0005]
为了实现上述目的,本发明的技术方案如下:
[0006]
一种风电机组塔筒倾斜角的检测方法,包括以下步骤:
[0007]
s1:在所述塔筒内任取一点o,取经过o点并平行于大地水平面的平面为水平面;
[0008]
s2:在所述塔筒内同一标高面上任取不在同一直线上的点b1、b2…
b
n
,其中,n≥3;
[0009]
s3:由点b1、b2…
b
n
分别做垂线与所述水平面相交分别形成交点a1、a2…
a
n
;
[0010]
s4:以o为原点,建立平面极坐标系,所述平面极坐标系与过o点的垂线z轴共同形成三维坐标系,以oa1、oa2…
oa
n
其中一条水平线作为角度起始轴,分别测量其他所述水平线与所述起始轴之间的夹角;
[0011]
s5:分别测量线段oa1、oa2…
oa
n
的长度以及线段a1b1、a2b2、
…
a
n
b
n
的长度;
[0012]
s6:根据步骤s4所测得的夹角和步骤s5测得的oa1、oa2…
oa
n
的长度以及线段a1b1、a2b2、
…
a
n
b
n
的长度,确定点b1、b2…
b
n
的空间坐标;
[0013]
s7:根据点b1、b2…
b
n
的空间坐标计算所述标高面的空间平面方程;
[0014]
s8:根据所述标高面的空间平面方程计算所述标高面与大地水平面的夹角,所述夹角为所述塔筒的倾斜角。
[0015]
进一步地,上述的检测方法中点b1、b2…
b
n
的空间坐标由测量装置测量并计算而得。
[0016]
进一步地,所述测量装置包括底板、调平螺母、底盘、轴杆、旋转盘和标靶,所述底板、调平螺母、底盘、轴杆和旋转盘从下到上依次设置,所述底盘上垂直设有第一激光系统,所述第一激光系统能够发射向上并平行于所述底盘的中轴线的第一测距激光;所述轴杆上固定设有一斜盘,所述轴杆的一端可转动地设置于所述底盘上、另一端与所述旋转盘固定连接,所述底盘、所述轴杆、所述旋转盘三者的中轴线重合;所述旋转盘包括上水平支撑面和下水平支撑面,所述上水平支撑面和下水平支撑面的中轴位置分别固定一水平仪和第二激光系统,所述第二激光系统能向一侧发射呈固定距离的第二测距激光和第三测距激光,所述第二测距激光与第三测距激光与所述旋转轴的中轴线垂直,第二测距激光、第三测距激光和所述旋转轴的中轴线在同一平面上;所述标靶包括依次连接的球形磁性部件、连杆和圆锥体,所述球形磁性部件、连杆和圆锥体三者的中轴线重合,每个所述标靶尺寸一致。
[0017]
进一步地,所述底盘上设有一轴管,所述轴管与所述底盘的中轴线重合,所述轴杆可转动地嵌套于所述轴管中。
[0018]
进一步地,所述水平仪为双轴倾角仪。
[0019]
进一步地,所述圆锥体的正投影呈等腰直角三角形形状。
[0020]
进一步地,所述底板下方固定设有支架,所述支架可调节所述测量装置在竖直方向上的高度。
[0021]
进一步地,所述点b1、b2…
b
n
的空间坐标的测量方法包括以下步骤:
[0022]
步骤一:将所述测量装置固定于所述塔筒内部,调节该测量装置使所述底盘与所述水平面平行;
[0023]
步骤二:选取所述塔筒内同一标高面上的点b1、b2…
b
n
,将所述标靶的球形磁性部件分别安装在所述点b1、b2…
b
n
上,且每个所述标靶的球形磁性部件安装在所述点b1、b2…
b
n
的部位相同,并且每个标靶的连杆与第二激光系统发射的第二测距激光垂直;其中,n≥3;
[0024]
步骤三:调节所述测量装置的高度,使所述第二激光系统的第二测距激光投射在所述标靶的连杆上,且第三测距激光投射在圆锥体的侧面上;
[0025]
步骤四:以所述步骤二中的其中一个点为起始点,始终保持顺时针或逆时针方向旋转所述旋转盘使所述第二测距激光和第三测距激光依次对准各个所述标靶的连杆和圆锥体,测量并计算得到步骤二中点b1、b2…
b
n
的空间坐标。
[0026]
本发明的目的之二在于提供一种风电机组塔筒倾斜角的测量装置,所述测量装置包括底板、调平螺母、底盘、轴杆、旋转盘和标靶,所述底板、调平螺母、底盘、轴杆和旋转盘从下到上依次设置,所述底盘上垂直设有第一激光系统,所述第一激光系统能够发射向上并平行于所述底盘的中轴线的第一测距激光;所述轴杆上固定设有一斜盘,所述轴杆的一端可转动地设置于所述底盘上、另一端与所述旋转盘固定连接,所述底盘、所述轴杆、所述旋转盘三者的中轴线重合;所述旋转盘包括上水平支撑面和下水平支撑面,所述上水平支撑面和下水平支撑面的中轴位置分别固定一水平仪和第二激光系统,所述第二激光系统能向一侧发射呈固定距离的第二测距激光和第三测距激光,所述第二测距激光和第三测距激
光分别与所述旋转轴的中轴线垂直,第二测距激光、第三测距激光和所述旋转轴的中轴线在同一平面上;所述标靶包括依次连接的球形磁性部件、连杆和圆锥体,所述球形磁性部件、连杆和圆锥体的中轴线重合,每个所述标靶尺寸一致。
[0027]
进一步地,所述圆锥体的正投影呈等腰直角三角形形状。
[0028]
相较于现有技术,本发明的有益效果如下:
[0029]
本发明采用不在同一直线上的三个点确定一个平面的原理,通过确定风电机组塔筒同一标高面上的三个点的空间极坐标,根据空间平面方程f(φ,l,z),计算出所述标高面的空间平面方程,然后通过公式计算所述标高面与大地水平面(或所述水平面)的夹角,该夹角即为所述塔筒的倾斜角。通过本发明的检测方法,可精确计算出所述塔筒的倾斜角,且无需通过在所述塔筒中测量多个点即可准确得到所述塔筒的倾斜角,操作方便且减少检测次数和流程。
[0030]
为了快速准确得到所述标高面上的点的空间坐标,本发明提供的测量装置,包括底板、调平螺母、底盘、轴杆、旋转盘和标靶,所述底板、调平螺母、底盘、轴杆和旋转盘从下到上依次设置,所述底盘上垂直设有第一激光系统,所述第一激光系统能够发射向上并平行于所述底盘的中轴线的第一测距激光;所述轴杆上固定设有一斜盘,所述轴杆的一端可转动地设置于所述底盘上、另一端与所述旋转盘固定连接,所述底盘、所述轴杆、所述旋转盘三者的中轴线重合;所述旋转盘包括上水平支撑面和下水平支撑面,所述上水平支撑面和下水平支撑面的中轴位置分别固定一水平仪和第二激光系统,所述第二激光系统能向一侧发射呈固定距离的第二测距激光和第三测距激光,所述第二测距激光和第三测距激光分别与所述旋转轴的中轴线垂直,第二测距激光、第三测距激光和所述旋转轴的中轴线在同一平面上;所述标靶包括依次连接的球形磁性部件、连杆和圆锥体,所述球形磁性部件、连杆和圆锥体的中轴线重合,每个标靶的尺寸一致。安装时,使所述标靶的连杆与第二测距激光垂直,并且通过调节该测量装置的高度,使得第二测距激光投射在所述标靶的连杆上、第三测距激光投射在所述标靶的圆锥体侧面上。使用时,将标靶的球形磁性部件的同一部位分别安装在同一标高面的测量点上,然后标靶的连杆与第二测距激光垂直;调节该测量装置在竖直方向的位置,使得第二测距激光投射在标靶的连杆上、第三测距激光投射在标靶的圆锥体侧面上,因标靶的连杆垂直于第二测距激光,而每个标靶的球形磁性部件在测量点安装的部位相同,因此可测得每个标靶的高度,以测量点中最低点所在的水平面建立平面极坐标,与测量装置的旋转盘(或轴杆或底盘)的中轴线共同形成三维坐标系,该测量点在该三维坐标系中的高度(z值)为0,其他测量点在该三维坐标系中的高度(即z值)分别为其他测量点的高度测量值减去该测量点的高度测量值,从而得出其他测量点在z轴上的坐标;因轴杆的一端可转动地设置于底盘上、另一端与旋转盘连接,且轴杆上固定设有一斜盘,当旋转所述旋转盘时,旋转盘带动所述轴杆旋转,以带动轴杆上的斜盘旋转,因斜盘所在的平面的空间平面方程是固定的,并且斜盘旋转一定角度时,通过第一测距激光发射的光在斜盘上投射的点,可确定该点在z轴上的读数,而第一测距激光在x轴上的位置固定,根据空间平面方程f(φ,l,z),计算得到该点与起始点的夹角φ,该夹角即为塔筒同一标高面上的点在水平面上的投影到起始点在水平面上的投影的夹角。以测量点中最低点所在的水平面建立平面极坐标,与旋转盘(或底盘或轴杆)的中轴线共同形成三维坐标系,通过计算确定测量点的三维空间坐标,然后计算出不在同一直线上的至少三个测量点所在的标高面
的空间平面方程,接着计算出该标高面与水平面的夹角,该夹角即为所述塔筒的倾斜角。
[0031]
使用本发明所提供的测量装置,可准确测量并计算得到所述塔筒同一标高面上的任一点的空间坐标,通过不在同一直线上的至少三个点的空间坐标计算该标高面的空间平面方程,根据该平面方程计算出该标高面与水平面的夹角,从而得到所述塔筒的倾斜角。而且测量精确,还可以提高测量效率,减少测量人员主观对测量结果的影响。
附图说明
[0032]
图1为本发明实施例风机结构示意图。
[0033]
图2为本发明实施例基础环结构示意图。
[0034]
图3为本发明实施例基础环与塔筒接触处的结构示意图。
[0035]
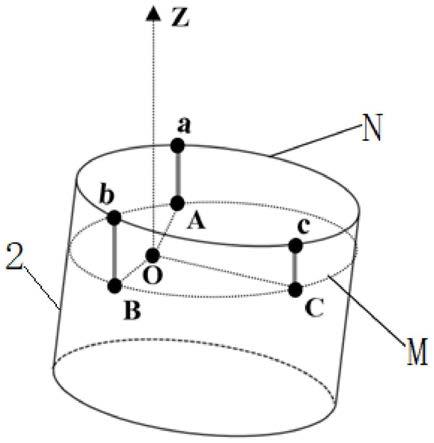
图4为本发明所提供的检测方法的原理图。
[0036]
图5为图4上的a、b、c三点在平面m上的投影图。
[0037]
图6为本发明实施例的测量装置结构示意图。
[0038]
图7为本发明实施例的测量装置的标靶的结构示意图。
[0039]
图8为本发明测量装置进行测量的示意图。
[0040]
图9为实施例中,当斜盘随着轴杆旋转时,第一测距激光在斜盘上投射的示意图。
[0041]
附图标识说明:
[0042]
1-塔筒,11-塔筒上法兰,2-基础环,21-基础环上法兰,3-螺栓,31-球形磁性部件,32-连杆,33-圆锥体,4-钢筋混凝土基础,5-底板,51-支架,6-调平螺母,7-底盘,71-第一激光系统,72-轴管,8-轴杆,9-旋转盘,91-上水平支撑面,92-下水平支撑面,93-第二激光系统,94-水平仪,10-斜盘,j1-第二测距激光,j2-第三测距激光,j3-第一测距激光。
具体实施方式
[0043]
在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
[0044]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
[0045]
关于本申请中的术语“同一标高面”,是指圆筒形工业产品在未发生偏移(圆筒与大地水平面垂直)时,大地水平面与圆筒的交线。
[0046]
本实施例的风电机组塔筒与钢筋混凝土的联结形式为基础环式联结,如图2,基础环2通过螺栓3与塔筒1联结,具体地,如图3,基础环上法兰21与塔筒上法兰11通过螺栓3联结。
[0047]
本发明所提供的风机基础环检测方法,其原理如下:
[0048]
如图4-5,在塔筒内任取一点o,过o点作水平面,塔筒任一标高面n上任取三点a、b、c,点a、b、c在所述水平面m上的投影分别为a、b、c。
[0049]
oa、ob、oc的长度分别为l
a
、l
b
、l
c
,aob、boc的夹角分别为α、β,aa、bb、cc的长度分别为z
a
、z
b
、z
c
。
[0050]
以o点为原点,建立平面极坐标系,以过o点的垂线为z轴,该平面极坐标系与z轴共同形成三维坐标系。若以oa为角度起始轴,那么a、b、c三点的空间坐标分别为(0,l
a
,z
a
)、(α,l
b
、z
b
)、(α+β、l
c
、z
c
);
[0051]
若点c为最低点,过点c作水平面,以该水平面建立极坐标系,并与z轴共同形成三维坐标系,以oa为角度起始轴,那么a、b、c三点的空间坐标分别为(0,l
a
、z
a-z
c
)、(α,l
b
、z
b-z
c
)、(α+β、l
c
、0);
[0052]
已知a、b、c三点的空间坐标,根据不在同一直线上的三点确定一个平面的原理,因a、b、c三点位于塔筒内的同一标高面上,因此可通过a、b、c三点确定该标高面的空间平面方程,从而计算出该标高面与水平面的夹角θ,该夹角θ即为塔筒的倾斜角。
[0053]
综上可知,如能测得三个测点在同一水平面上的投影的夹角α和β、测点之间的高度差,以及测点至z轴的距离l,就能通过计算得到塔筒的倾斜角。
[0054]
为了便于测量a、b、c三点的高度,本发明通过检测装置进行测量,具体如图6-7所示,本实施例提供的风机基础环倾斜角的检测装置,包括底板5、调平螺母6、底盘7、轴杆8、旋转盘9和标靶,底板5、调平螺母6、底盘7、轴杆8和旋转盘9从下到上依次设置,底盘7上垂直设有第一激光系统71,第一激光系统71能够发射向上并平行于底盘的中轴线s1的第一测距激光j3;轴杆8上固定设有一斜盘10,轴杆8的一端可转动地设置于底盘7上、另一端与旋转盘9固定连接,旋转旋转盘9可带动轴杆8绕自身中轴线360
°
旋转,轴杆8的旋转可带动斜盘10同角度同方向旋转。底盘7、轴杆8和旋转盘9三者的中轴线重合。旋转盘9包括上水平支撑面91和下水平支撑面92,上水平支撑面91和下水平支撑面92的中心位置分别固定第二激光系统93和水平仪94,第二激光系统93能向一侧发射呈固定距离的第二测距激光j1和第三测距激光j2,第二测距激光j1和第三测距激光j2分别中轴线s1垂直且三者在同一平面上;标靶包括依次连接的球形磁性部件31、连杆32和圆锥体33,球形磁性部件31、连杆32和圆锥体33的中轴线重合,每个标靶的尺寸一致。本实施例中,连杆32呈管状且外径很小,相对于连杆的长度,其外径可忽略;而且连杆32和圆锥体33均由金属制成,因球形磁性部件31具备磁性,球形磁性部件31、连杆32和圆锥体33三者之间通过磁力连接并在竖直方向保持动态平衡状态,即球形磁性部件31的任意部位吸附于其他金属上,连杆32和圆锥体33始终位于球形磁性部件31的底部且呈连杆32呈竖直状态。
[0055]
具体地,本实施例中,水平仪94为双轴倾角仪;底板5下方还固定有一支架51,支架51可调节测量装置在与大地水平面垂直的方向(即竖直方向)上的高度。
[0056]
具体地,以下结合图8对本发明测量装置的使用进行详细说明。
[0057]
基础环2安装时,所有基础环上法兰21下表面最靠近基础环2圆心的点形成一个标高面,本实施例中,以每个基础环上法兰21下表面最靠近基础环2圆心的点为测量点,标靶分别安装于每个测量点上,安装时,因球形磁性部件31具备磁性,而法兰为金属,将球形磁性部件31的顶部固定于测量点上,然后依次连接连杆32和圆锥体33,连杆32和圆锥体33在磁力作用下在竖直方向上保持平衡。
[0058]
将该测量装置用于测量时,先将支架51固定于基础环2内部任一位置,将测量装置固定于支架51上,通过调节平衡螺母6使双轴倾角仪与大地水平面平行,从而使底盘7与大地水平面平行、底盘7的中轴线s1与大地水平面垂直。因第一激光系统71垂直设在底盘7上,由第一激光系统71发射的第一测距激光j3保持与大地水平面垂直;因第二测距激光j1和第
三测距激光j2与底盘7的中轴线s1垂直且位于同一平面上,因此第二测距激光j1和第三测距激光j2分别与大地水平面平行。任选标高面上的三个测量点,将标靶分别安装于每个测量点上,安装时,标靶的球形磁性部件31顶部依靠磁力附着于测量点上。
[0059]
在进行测量前,先上下调节支架51的高度,以调节第二激光系统93的高度,使得第二测距激光j1和第三测距激光j2投射在每个标靶上时,第二测距激光j1投射在标靶的连杆32上、第三测距激光j2投射在圆锥体33的侧面上。标靶安装完成后,以经过第三测距激光j2并平行于大地水平面的平面为水平面,以底盘7中轴线s1为z轴建立极坐标系;以其中一个标靶所在的测量点为起始点,打开第一、第二、第三测距激光,如图8-9,使第一测距激光j3投射在斜盘10上、第二测距激光j1投射在标靶的连杆32上、第三测距激光j2投射在标靶的圆锥体33的侧面上,此时,起始点在极坐标系中的极坐标为(0,l1,z1),而第一测距激光j3投射在斜盘10上的第一个点的极坐标为(0,l1,z1);逆时针方向旋转旋转盘9,使第二、第三测距激光投射在第二个标靶上,此时,旋转盘9旋转的角度为α,第一测距激光投射在斜盘上的第二个点的极坐标为(α,l2,z2),测得第二个标靶所在的测量点的极坐标为(α,l2,z2);继续逆时针方向旋转旋转盘9,使第二测距激光j2投射在第三个点的标靶上,此时,旋转盘9旋转的角度为β,第一测距激光j3投射在斜盘10上的第三个点的极坐标为(α+β,l3,z3),第三个标靶所在的点的极坐标为(α+β,l3,z3)。
[0060]
因斜盘10固定于轴杆8上,因此斜盘10的空间平面方程是固定的,斜盘10的平面方程为已知,而第一测距激光j3在底盘7上的位置固定,则第一测距激光j3与底盘7的中轴线s1(极坐标的z轴)的距离是固定的,因此l1、l2、l3为已知,z1、z2、z3分别由第一测距激光j3测量而得,第一测距激光j3投射在斜盘10上的第一个点时的读数,即为z1,同理,第一测距激光j3投射在斜盘10上的第二个点、第三个点的读数分别为z2和z3,由此,根据空间平面方程f(φ,l,z),计算得到α、α+β,进而算出β。该测量装置进行测量时,斜盘10与旋转盘9的旋转方向和角度相同,因此,α和β即分别为第二测距激光j1从第一测量点到第二测量点、第二测量点到第三测量点的旋转角度。而因标靶的连杆32的外径足够小可忽略,因此,第二测距激光投射在每个标靶的连杆30时的读数即为每个测量点到z轴的距离l,即l1、l2、l3可通过第二测距激光j1测量直接得到,第二测距激光j1投射在每个标靶上的读数即分别为l1、l2、l3;z1、z2、z3通过第二测距激光j1和第三测距激光j2测量并计算而得,如图8,以第一个测量点a的高度z1为具体说明,具体测量和计算方式为:靶标的尺寸一样,每个标靶的连杆32长度相同,当第二测距激光j1和第三测距激光j2投射在该连杆32标靶上时,第三测距激光j2的读数比第二测距激光j1的读数小
△
l,ω为圆锥体的正投影斜边与底边的夹角,根据“两直线平行,内错角相等”的原理,ω为已知,由公式
△
h=
△
l
·
tanω,计算得到
△
h;因标靶的尺寸一致,因此,球形磁性部件的顶部与连杆底部之间的距离一致,假设该距离为h,若以经过j2的水平面为参照面,则三个测量点的z1、z2、z3分别为h+
△
h1、h+
△
h2、h+
△
h3。
[0061]
假设三个测量点中,第三个测量点为最低点,以三个测量点中最低点所在的水平面建立平面极坐标,与底盘(或轴杆或旋转盘)的中轴线(该中轴线垂直于该水平面)共同形成三维坐标系,则第一个测量点的极坐标为(0,l1,z
1-z3),第二个测量点的极坐标为(α,l2,z
2-z3),第三个测量点的极坐标为(α+β,l3,0)。确定三个点的极坐标后,通过平面方程f(φ,l,z)计算出三个测量点所在的标高面的平面方程,接着根据该平面方程计算出平面方程与水平面的夹角,该夹角即为塔筒的倾斜角。
[0062]
进一步地,为了使轴杆8在底盘7上旋转时不发生倾斜或偏移,底盘7的中心位置设有垂直于底盘的轴管72,轴杆8可旋转地嵌套于轴管72中。
[0063]
进一步地,为了便于
△
h的计算,圆锥体的正投影呈等腰直角三角形形状,该正投影的底边与斜边的夹角为45
°
,通过j1与j2的读数差值即可得到
△
h的值。
[0064]
除此之外,虽然本实施例中,球形磁性部件通过磁力作用使整个标靶安装于测量点上,但并不说明该球形磁性部件仅能通过磁力作用安装于测量点上,也不能限定为测量点仅限为金属材质,若测量点不是金属材质不能通过磁力作用与球形磁性部件连接,还可通过外物辅助作用将球形磁性部件于测量点连接,比如通过粘结剂粘接等方式也可使球形磁性部件安装于测量点上,从而实现标靶的安装。
[0065]
通过本发明所提供的方案,可快速精确得到基础环的倾斜角,操作方便;而且可提高测量效率,减少测量人员对测量结果的影响。
[0066]
需要说明的是,本申请中所提到的标靶的尺寸一致,是指每个标靶的球形磁性部件、连杆和圆锥体的尺寸和形状均一致。另外,测量点可不仅限于三个,可为三个以上,测量点越多,测量精确度随之增加。而且,本发明所提供的方法和测量装置不仅限于能够用于上述具体实施例,除了本发明具体实施例之外,本发明的方法和测量装置还可适用于采用其他形式安装的风电机组塔筒,如锚栓安装等,或者任意安装方式,除此之外,本发明提供的测量装置不仅可应用于与钢筋混凝土联结的基底,还可在塔筒任意位置进行测量,只要能在塔筒上找到标高面并可安装本发明的测量装置,并且能够调节测量装置使得该测量装置的第二测距激光和第三测距激光分别位于连杆和圆锥体的侧面上,即可采用本发明所提供的方法测量风电机组塔筒的倾斜角。
[0067]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0068]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1