一种基于潮汐模型与摄影测量技术的海滩监测方法与流程
[0001]
本发明涉及海滩测绘技术领域,尤其是涉及一种基于潮汐模型与摄影测量技术的海滩监测方法。
背景技术:
[0002]
海滩生态环境复杂多样,且受到较大的物理和化学因素的交替影响,形成的海滩生态系统也较复杂,具有重要的资源、生态和环境价值,海滩生态环境关系到人类生存和海洋资源的可持续发展,海滩形态演化研究更是关系到海滩生态系统长期可持续性和相关海防问题的关键科学问题之一。
[0003]
传统的海滩数字高程模型(digital elevation model,dem)测绘方法主要为野外定时定点测量。此类测量方法方法劳动强度大、工作周期长、效率低下,难以实现海岸带的动态监测,且受地理环境及天气等条件的限制,部分调查区域难以到达,测绘难度大。
技术实现要素:
[0004]
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于潮汐模型与摄影测量技术的海滩监测方法。
[0005]
本发明的目的可以通过以下技术方案来实现:
[0006]
一种基于潮汐模型与摄影测量技术的海滩监测方法,该方法包括如下步骤:
[0007]
s1、布置拍摄海滩图片的拍摄终端,对拍摄终端进行标定获取用于像点与相应的地面点进行坐标转换的共线方程;
[0008]
s2、拍摄终端拍摄海滩图片,对海滩图片进行水边线提取得到水边线的像素坐标;
[0009]
s3、建立当前海滩所在海域的潮汐模型,基于潮汐模型获取s2中水边线对应的高程,基于水边线的高程利用共线方程将水边线的像素坐标转换成实地坐标;
[0010]
s4、基于多时相水边线的实地坐标生成海滩数字高程模型。
[0011]
优选地,所述的拍摄终端包括摄像机。
[0012]
优选地,所述的拍摄终端设置多个,多个拍摄终端分别以不同的角度监测海滩,每个拍摄终端拍摄范围为部分海滩区域,多个拍摄终端的整体拍摄范围覆盖全部海滩区域。
[0013]
优选地,步骤s1中分别对每个拍摄终端进行标定,确定其对应的共线方程,具体标定过程为:
[0014]
选取各拍摄终端拍摄范围内的地面控制点,所述的地面控制点至少设置3个,获取各地面控制点在图片中像点的像素坐标以及对应的地面坐标;
[0015]
将地面控制点的像素坐标和地面坐标带入共线方程求解得到外方位元素,所述的共线方程为:
[0016][0017]
其中,(x,y)为像点的像素坐标,(x,y,z)像点对应的地面点的实地坐标,(x
s
,y
s
,z
s
)为拍摄终端的实地坐标,f为拍摄终端主距,a1、a2、a3、b1、b2、b3、c1、c2、c3为外方位元素。
[0018]
优选地,所述的各拍摄终端拍摄范围内的地面控制点设置6个,采用最小二乘法平差计算求解得到外方位元素,完成各拍摄终端的标定,获取对应的共线方程。
[0019]
优选地,步骤s2具体为:设定监测时间间隔,到达监测时间点时各拍摄终端分别连续拍摄n张图片,对各个拍摄终端拍摄的n张图片分别进行灰度平均处理得到待监测时间点对应的海滩图片,进而对各个拍摄终端得到的所有监测时间点的海滩图片分别进行水边线提取并执行步骤s3的操作。
[0020]
优选地,步骤s2中采用canny算法进行水边线提取。
[0021]
优选地,步骤s3具体为:
[0022]
s11、建立当前海滩的潮汐模型;
[0023]
s12、基于潮汐模型求取海滩图片对应的监测时刻的潮高,将潮高作为该监测时刻水边线的高程z
w
;
[0024]
s13、将共线方程中水边线中各像点对应的地面点实地坐标中的z坐标值赋值为z
w
,将水边线中各像点的像素坐标代入共线方程求取对应的地面点实地坐标中的x、y坐标值,进而得到水边线各像点对应的地面点的实地坐标(x
wi
,y
wi
,z
w
),其中x
wi
,y
wi
分别为水边线中第i个像点对应的地面点实地坐标中的x、y坐标值,z
w
为水边线中各像点对应的地面点实地坐标中的z坐标值。
[0025]
优选地,步骤s4具体为:根据获得的同一地理坐标系下的水边线数据,通过调用网格化算法对其进行克里金插值,生成海滩数字高程模型。
[0026]
优选地,该方法还包括步骤:
[0027]
s5、基于海滩数字高程模型计算出海滩监测值,所述的海滩监测值包括海滩宽度、海滩坡度以及海岸线位置。
[0028]
与现有技术相比,本发明具有如下优点:
[0029]
(1)本发明提供了一种基于潮汐模型与摄影测量技术的海滩监测方法,采用拍摄终端对海滩表面进行长时间连续监测,获取海滩的多时相水边线数据,调用网格化算法对多个时刻的水边线坐标进行克里金插值,自动生成高精度的海滩数字高程模型,进而实现海滩高精度无人化动态监测。
[0030]
(2)本发明采用多个拍摄终端对海滩不同区域进行监测,从而对每个区域拍摄的海滩图片分别进行处理得到相应区域的海滩数字高程模型,最后进行整合得到整个海滩的海滩数字高程模型,此种方式更加精准可靠。
[0031]
(3)本发明在对拍摄终端进行标定时采用6个地面控制点,采用最小二乘法平差计算求解得到外方位元素,提高解算精度,从而提高海滩监测结果的准确性。
附图说明
[0032]
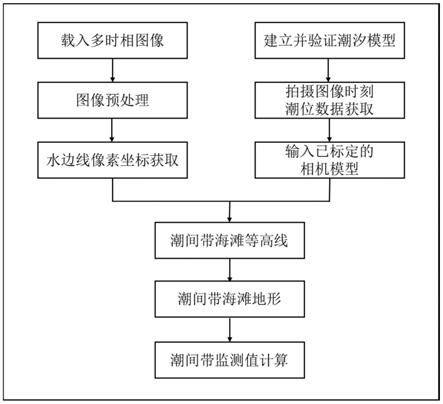
图1为本发明一种基于潮汐模型与摄影测量技术的海滩监测方法的流程框图。
具体实施方式
[0033]
下面结合附图和具体实施例对本发明进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本发明并不意在对其适用物或其用途进行限定,且本发明并不限定于以下的实施方式。
[0034]
实施例
[0035]
如图1所示,一种基于潮汐模型与摄影测量技术的海滩监测方法,该方法包括如下步骤:
[0036]
s1、布置拍摄海滩图片的拍摄终端,对拍摄终端进行标定获取用于像点与相应的地面点进行坐标转换的共线方程,拍摄终端包括摄像机,拍摄终端设置多个,多个拍摄终端分别以不同的角度监测海滩,每个拍摄终端拍摄范围为部分海滩区域,多个拍摄终端的整体拍摄范围覆盖全部海滩区域,本实施例中,在在岸边一定高度建筑物或支架上设立一组6个高分辨率的数码摄像探头,每个摄像头以不同的角度监测海滩的各个方向,共覆盖180
°
视野范围,以获得整个海滩的图像数据;
[0037]
s2、拍摄终端拍摄海滩图片,对海滩图片进行水边线提取得到水边线的像素坐标;
[0038]
s3、建立当前海滩所在海域的潮汐模型,基于潮汐模型获取s2中水边线对应的高程,基于水边线的高程利用共线方程将水边线的像素坐标转换成实地坐标;
[0039]
s4、基于多时相水边线的实地坐标生成海滩数字高程模型。
[0040]
作为优选的实施方式,该方法还包括步骤:
[0041]
s5、基于海滩数字高程模型计算出海滩监测值,海滩监测值包括海滩宽度、海滩坡度以及海岸线位置,具体地:
[0042]
s5.1、海滩宽度计算:使用海滩数字高程模型,对其y方向的海滩宽度作平均,即为海滩宽度;
[0043]
s5.2、海滩坡度计算:θ=tan-1
(δh/l),θ为海滩坡度,δh为海滩上下边缘高程差,l为海滩宽度;
[0044]
s5.3、海岸线位置计算:使用数字高程模型,输入高潮大潮时的潮位高程,得到的等高线即为海岸线。
[0045]
步骤s1中分别对每个拍摄终端进行标定,确定其对应的共线方程,具体标定过程为:
[0046]
选取各拍摄终端拍摄范围内的地面控制点,地面控制点至少设置3个,获取各地面控制点在图片中像点的像素坐标以及对应的地面坐标;
[0047]
将地面控制点的像素坐标和地面坐标带入共线方程求解得到外方位元素,共线方程为:
[0048][0049]
其中,(x,y)为像点的像素坐标,(x,y,z)像点对应的地面点的实地坐标,(x
s
,y
s
,z
s
)为拍摄终端的实地坐标,f为拍摄终端主距,a1、a2、a3、b1、b2、b3、c1、c2、c3为外方位元素。
[0050]
各拍摄终端拍摄范围内的地面控制点设置6个,采用最小二乘法平差计算求解得到外方位元素,完成各拍摄终端的标定,获取对应的共线方程,采用6个地面控制点,并利用最小二乘法平差计算求解得到外方位元素能够提高解算精度,从而提高海滩监测结果的准确性。
[0051]
步骤s2具体为:设定监测时间间隔,到达监测时间点时各拍摄终端分别连续拍摄n张图片,对各个拍摄终端拍摄的n张图片分别进行灰度平均处理得到待监测时间点对应的海滩图片,进而对各个拍摄终端得到的所有监测时间点的海滩图片分别进行水边线提取并执行步骤s3的操作。本实施例中每隔30分钟采集一次图像,每次采集10分钟,1秒中采集1张图片,从而在一个监测时间点每个拍摄终端获取600张图片,对600张图片进行作时均处理(即灰度平均处理),将时均图像及瞬时图像分别进行保存,进而提取水边线时基于时均图像进行提取。
[0052]
步骤s2中采用canny算法进行水边线提取,具体为:
[0053]
s2.1、使用高斯滤波器,以平滑图像,滤除噪声,令f(x,y)表示输入图像,g(x,y)表示高斯函数:
[0054][0055]
用g和f的卷积形成一幅平滑后的图像f
s
(x,y),其中f
s
(x,y)=g(x,y)*f(x,y);
[0056]
s2.2、计算图像中每个像素点的梯度幅度m(x,y)和方向a(x,y);计算梯度幅度m(x,y)和方向a(x,y):
[0057][0058][0059]
式中,
[0060]
使用梯度幅度和方向来估计每一点处的边缘强度和方向;
[0061]
s2.3、应用非极大值抑制,以消除边缘检测带来的杂散响应,对梯度图像中每个像素进行非极大值抑制的算法是:(1)将当前像素的梯度强度与沿正负梯度方向上的两个像素进行比较;(2)如果当前像素的梯度强度与另外两个像素相比最大,则该像素点保留为边缘点,否则该像素点将被抑制;
[0062]
s2.4、应用双阈值检测来锁定待提取的水边线边缘,并使用提取工具导出水边线边缘的像素坐标。
[0063]
步骤s3具体为:
[0064]
s11、建立当前海滩的潮汐模型;
[0065]
s12、基于潮汐模型求取海滩图片对应的监测时刻的潮高,将潮高作为该监测时刻水边线的高程z
w
;
[0066]
s13、将共线方程中水边线中各像点对应的地面点实地坐标中的z坐标值赋值为z
w
,将水边线中各像点的像素坐标代入共线方程求取对应的地面点实地坐标中的x、y坐标值,进而得到水边线各像点对应的地面点的实地坐标(x
wi
,y
wi
,z
w
),其中x
wi
,y
wi
分别为水边线中第i个像点对应的地面点实地坐标中的x、y坐标值,z
w
为水边线中各像点对应的地面点实地坐标中的z坐标值。
[0067]
步骤s4具体为:根据获得的同一地理坐标系下的水边线数据,通过调用网格化算法对其进行克里金插值,生成海滩数字高程模型。
[0068]
本实施例选取平水桥海滩图像作为具体实例,平水桥海滩为砂质海岸,位于河北省秦皇岛市北戴河区,东侧为老虎石浴场,现场布置了6个摄像头对海滩进行养滩监测。现导入2016年07月19日c2、c3、c4、c5共4个摄像头监测区域06:00、11:00、18:30时刻下共12张图像,利用halcon19.05进行光学校正、几何校正、高斯滤波后,分别提取每一幅图像的的时均水边线图像坐标,利用平高控制点分别对每个摄像头进行标定,得到标定好的摄影测量模型,同时建立潮汐模型,给出上述拍摄时刻的潮位,连同提取的水边线图像坐标,输入至摄影测量模型,进而得到每个监测区域下三条等高线,将其在surfer12中插值得到7月19日海滩dem。
[0069]
利用当日的实测剖面数据对dem精度进行验证,验证结果见表1,经验证,高程误差均在0.25m以内,均小于视频监测系统设计时的最大误差0.25m,平均误差为0.121m。
[0070]
表1 dem精度验证结果
[0071][0072]
上述实施方式仅为例举,不表示对本发明范围的限定。这些实施方式还能以其它
各种方式来实施,且能在不脱离本发明技术思想的范围内作各种省略、置换、变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1