一种细集料图像采集装置的制作方法
[0001]
本发明属于集料集配检测技术领域,具体涉及一种细集料图像采集装置。
背景技术:
[0002]
公路路用集料颗粒粒径分布范围一般在0.075mm至37.5mm之间,一般使用2.36mm或4.75mm作为粗、细集料颗粒粒径分界线。实际公路工程中,为了满足不同结构层的材料粒径分布范围的设计要求,即材料集配要求,一般要将两种或两种以上不同粒径范围的松散粒料进行混合。在水泥混凝土、沥青混凝土以及路面基层材料中,所需集料的粒径尺寸分布范围较大,同时对不同粒径范围的材料含量有较为严格的要求。
[0003]
根据《公路工程集料试验规程》规范规定,现有测试方法主要采用不同孔径的标准筛和电子秤对集料颗粒粒径分布范围及不同范围所占比重进行测定。试验首先将烘干后的试验样本倒入筛网孔径由大致小一次罗列的标准筛并通过振动的方式对混合料进行筛分。然后,对每个筛网上筛余的颗粒进行称重,从而计算各筛网上颗粒在试验样本中所占的比重,根据试验规程画出表征试件粒径分布的级配曲线。
[0004]
现有的筛分试验装置虽然原理简单,但存在以下缺陷:(1)试验样本的准备过程包括水洗、烘干等步骤,耗时时间长,大概需要24个小时;(2)试验结果受人为因素影响较大;(3)筛分试验过程中振动筛运行时噪音大、有粉尘污染;(4)振动筛分过程中容易造成颗粒破碎。
技术实现要素:
[0005]
针对现有技术存在的问题,本发明的目的在于提供一种细集料图像采集装置及集配图像检测方法,以解决现有技术中集料图像采集时间长、成本高、有污染、结果可重复性差以及难以广泛推广应用的关键技术问题。
[0006]
为了解决上述问题,本发明采用如下技术方案予以实现:
[0007]
一种细集料图像采集装置,包括图像采集箱,所述图像采集箱内设置有旋转机构,所述旋转机构上设置有沉积器,所述沉积器侧壁上连接有进水管,沉积器顶端开设有进料口、底端开设有进气口;所述进气口可拆卸地连接有底座,所述底座上开设有加气孔。
[0008]
所述沉积器侧壁沿周向连续设置透明的图像采集窗口,所述图像采集箱内还设置有图像采集机构,所述的图像采集机构的图像采集端朝向沉积器,用于采集沉积器内的图像。
[0009]
所述旋转机构包括旋转电机,所述旋转电机的输出轴上旋转安装有旋转盘,所述旋转盘上设置有气泵,所述气泵的一端连接进气管,气泵的另一端通过连接件与加气孔相连。
[0010]
所述连接件包括依次顺序连接的气管转换器、供气管和接头。
[0011]
所述图像采集机构包括竖直设置在图像采集箱内的相机支架,所述相机支架的竖向中心线与沉积器的竖向中心线平行且位于同一平面内,所述相机支架前端面中间沿竖向
开设有滑槽,所述滑槽内配合设置有能够沿滑槽上下滑动的滑块,所述滑块上安装有相机。
[0012]
所述图像采集箱顶板与进料口对应位置上开设有填料口。
[0013]
所述沉积器通过设置在侧壁底端的卡钳固定端与设置在底座上的卡钳卡条相连。
[0014]
所述图像采集箱内还设置有图像采集辅助光源。
[0015]
所述图像采集箱的外壁上设置有操作面板。
[0016]
一种细集料粒径分析方法,使用本发明所述的细集料图像采集装置,该方法包括以下具体步骤:
[0017]
步骤s1、使用细集料图像采集装置采集多张细集料图像;
[0018]
步骤s2、对采集得到的每张细集料图像进行小波变换处理,得到细集料图像的小波指数,由得到的细集料图像的小波指数计算得出不同细集料颗粒的像素个数;
[0019]
步骤s3、由不同细集料颗粒的像素个数计算得出不同细集料颗粒的实际粒径;
[0020]
步骤s4、依据不同细集料颗粒的实际粒径在细集料图像中的面积比得出不同粒径细集料颗粒总质量占全部集料颗粒总质量的百分率;
[0021]
步骤s5、对采集的图像计算集料颗粒的粒径和细集料颗粒总质量占全部集料颗粒总质量的百分率求平均值,绘制得到细集料粒径分布曲线。
[0022]
具体的,步骤s3中所述的细集料颗粒的实际粒径按照公式i计算得出:
[0023][0024]
其中,d为细集料颗粒的实际粒径,单位为mm,m为图像放大倍数,ppd为细集料颗粒包含的像素个数。
[0025]
具体的,步骤s2中所述的细集料颗粒的像素个数按照公式ii计算得出:
[0026][0027]
其中,ca为小波指数。
[0028]
本发明与现有技术相比,有益的技术效果是:
[0029]
1、检测时间短:本发明的工作过程只包括集料沉积、图像采集、图像分析三个过程,整个试验过程只需15~20分钟。
[0030]
2、检测成本低:传统筛分试验购买和保养筛子、天平、烘箱、振动设备等方面的成本很高。本发明结构简单,前期设备投入少,后期维护费用低。
[0031]
3、本发明在使用过程中不产生任何噪音和粉尘,有利于保护环境,且操作控制简便,易于广范推广应用。
附图说明
[0032]
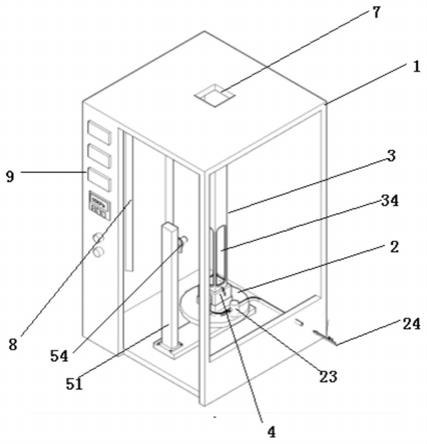
图1是本发明的装配结构示意图;
[0033]
图2是本发明的零件结构示意图;
[0034]
图3是本发明的旋转机构结构示意图;
[0035]
图4是本发明的细集料粒径图像分析方法流程图;
[0036]
图5实施例1中采集得到的细集料颗粒图像;
[0037]
图6是实施例1得到的细集料粒径分布曲线。
[0038]
图中各个标号的含义为:1-图像采集箱,2-旋转机构,3-沉积器,4-底座,5-图像采集机构,6-连接件,7-填料口,8-图像采集辅助光源,9-操作面板;
[0039]
21-旋转电机,22-旋转盘,23-气泵,24-进气管,211-输出轴;
[0040]
31-进水管,32-进料口,33-进气口,34-图像采集窗口,35-卡钳固定端;
[0041]
41-加气孔,42-卡钳卡条;
[0042]
51-相机支架,52-滑槽,53-滑块,54-线阵相机;
[0043]
61-气管转换器,62-供气管,63-接头。
[0044]
以下结合附图和具体实施例对本发明进行进一步详细的说明。
具体实施方式
[0045]
需要说明的是,本发明中的所有零部件和材料,在没有特殊说明的情况下,均采用本领域已知的零部件和材料。
[0046]
本发明中的操作面板为常规操作元件,可以实现设备开关、气泵开关、气阀开关、气压调节、旋转电机开关、光源控制开关等功能选择。
[0047]
以下给出本发明的具体实施例,需要说明的是,本发明并不局限于以下具体实施例,凡在本申请技术方案基础上做的等同变换均落入本发明的保护范围。
[0048]
本发明所用的术语“上”、“下”、“前”、“后”、“顶”、“底”等指示的方位或位置关系仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“内”、“外”是指相应部件轮廓的内和外,不能将上述术语理解为对本发明的限制。
[0049]
此外,术语“第一”、“第二”等序数词仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
[0050]
在本发明中,在未作相反说明的情况下,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0051]
实施例
[0052]
本实施例给出一种细集料图像采集装置,如图1-3所示,包括图像采集箱1,图像采集箱1内设置有旋转机构2,旋转机构2上设置有沉积器3,沉积器4侧壁上连接有进水管31,沉积器3顶端开设有进料口32、底端开设有进气口33;进气口33可拆卸地连接有底座4,底座4上开设有加气孔41。进料口32用于向沉积器3中添加集料,进水管31用于向沉积器3中注水,通过加气孔41可向沉积器3中加气,旋转机构2用于带动沉积器3旋转。
[0053]
沉积器3侧壁沿周向连续设置若干透明的图像采集窗口34,图像采集箱1内还设置有图像采集机构5,图像采集机构5的图像采集端朝向沉积器3,用于采集沉积器3内的图像。
[0054]
作为本发明的优选方案,本实施例中的图像采集箱1为由底板、顶板和四个长方形侧板围合而成的长方体结构。在图像采集箱1底板上设置了一个长方形的支撑台,旋转台2和沉积器3设置在支撑台上,底座被设计为u型,包括一体设置的支撑面和支撑腿,支撑面和
支撑腿围合形成一个容纳空间,进气孔41设置在支撑面上,支撑面上设置了限位台阶。在其他方案中,底座直接固定在图像采集箱1底板上。
[0055]
旋转机构2包括旋转电机21,旋转电机21的输出轴211上旋转安装有旋转盘22,旋转盘22上设置有气泵23,气泵23的一端连接进气管24,进气管24通过图像采集箱1侧壁上开设的安装孔穿出图像采集箱1,气泵23的另一端通过连接件6与加气孔41相连。气泵23的作用是持续给沉积器3供气,在气流的作用下,细集料颗粒在充满水的沉积器3中下沉时,通过通气孔41向沉积器中通气,在沉积器3内产生起亚,从而使集料颗粒在沉积结束后能够按颗粒粒径大小进行有序排列。
[0056]
连接件6包括依次顺序连接的气管转换器61、供气管62和接头63。气管转换器61的作用是将气泵23的一孔出气口转换成四孔出气口。
[0057]
图像采集机构5包括竖直设置在图像采集箱1内的相机支架51,相机支架51的竖向中心线与沉积器3的竖向中心线平行且位于同一平面内,相机支架51前端面中间沿竖向开设有滑槽52,滑槽52内配合设置有能够沿滑槽52上下滑动的滑块53,滑块53上安装有线阵相机54。线阵相机54的镜头朝向沉积器3,滑块53用于带动线阵相机54沿滑槽52上下滑动,通过透明的图像采集窗口采集沉积器3内的颗粒图像。
[0058]
作为一种优选方案,在本实施例中,滑槽52顶端与支撑台上表面的垂直距离大于图像采集窗口34竖向上端与与支撑台上表面的垂直距离,滑槽52底端与支撑台上表面的垂直距离大于图像采集窗口34竖向底端与与支撑台上表面的垂直距离。
[0059]
图像采集箱1顶板与进料口31对应位置上开设有填料口7,通过填料口7和位于填料口7下方的进料口向沉积器3中添加集料,在本实施例中,添加集料时使用了漏斗。
[0060]
在本实施例中,作为一种优选方案,沉积器3通过设置在侧壁底端的卡钳固定端34与设置在底座4上的卡钳卡条42相连。
[0061]
在某些方案中,沉积器3通过其他方式与底座相连,如卡和连接,螺纹连接等,在支撑台上还设置了用于固定底座4的卡槽。
[0062]
图像采集箱1内还设置有图像采集辅助光源8。
[0063]
图像采集箱1的外壁上设置有操作面板9,操作面板上设置有设备按钮、气泵按钮、气阀按钮、光源控制按钮等。
[0064]
本实施例的工作原理如下:
[0065]
将细集料倒入有水的沉积器3,集料颗粒在充满水的沉积器3中下沉时,由气泵33提供的气体经底座4的通气孔5411进入沉积器3,沉积器3内的水中产生自下而上的气流,根据沉积原理,集料按照颗粒粒径的大小不同依次沉淀在沉积器3底部,然后,旋转机构2带动沉积器3旋转,线阵相机54在滑槽52内上下滑动,通过图像采集窗口34完成颗粒图像采集。
[0066]
本实施例的装配过程如下:
[0067]
沉积器3通过卡钳固定端35和卡钳卡条42与底座4密封连接,从而构成沉积器3;沉积器3通过底座4与旋转机构2连接。将气泵23固定在旋转盘22上,气泵23的一端连接进气管24,气泵23的另一端通过气管转换器61与供气管62相连,供气管62通过接头63与通气孔41相连。线阵相机54通过设置在滑槽52内的滑块53与相机支架51连接组成图像采集机构4。图像采集机构5通过螺丝固定在支撑台上,支撑台通过螺丝固定在图像采集箱1的底板上。
[0068]
本实施例的使用过程如下:
[0069]
1、注水及通气:向沉积器3内注水。接通图像采集箱1的电源,开启操作面板9上的设备按钮和气泵按钮,调节气压至15kpa,打开气阀按钮,在沉积器3内出现均匀气泡时,准备向沉积器3中添加细集料。
[0070]
2、加料:使用漏斗通过填料口7和进料口32将经水洗称重的粒料加入沉积器3,将漏斗内的剩余粒料也冲洗加入沉积器3,继续通气5分钟后关闭气泵23,使细集料进行5分钟的气压分散。
[0071]
3、自由沉淀:关闭气阀按钮及气泵按钮,使得沉积器3内的细集料颗粒自由沉淀,记录沉淀时间,然后启动线阵相机54进行图像采集。
[0072]
4、图像采集:打开光源控制按钮,线阵相机54在相机支架51的滑槽52内沿竖向上下移动,通过透明的图像采集窗口52采集沉积器3内的颗粒图像,在完成对沉积器3一个侧壁的图像采集后,旋转电机按钮,使得沉积器3转动,依次采集其它三个平面的粒料图像,采集完毕后,关闭光源控制按钮。
[0073]
5、清洗沉积器3:打开卡钳卡条42,拆下沉积器3的底座4和沉积器3,清洗沉积器3。
[0074]
然后,使用本发明的细集料粒径分析方法分析细集料的粒径分布,具体包含以下步骤:
[0075]
步骤s1、使用细集料图像采集装置采集多张细集料图像;
[0076]
细集料在沉积器中沉积,在此过程中,颗粒粒径大的集料先沉积,颗粒粒径小的集料后沉积;作为本发明的一种优选方案,采用有效像素大于3600万的线阵相机54,从沉积器3的4个图像采集窗口34共采集了四张细集料高清图像,所采集到的细集料高清图像如图5所示。
[0077]
步骤s2、对采集得到的细集料图像进行小波变换处理,得到细集料图像的小波指数,小波指数部分数据如表1所示。
[0078]
表1图5图像的部分ca值数据
[0079]
5.8250214.993385.4669645.3778115.6168015.7289375.1567785.4786925.5187745.649452
[0080]
然后,由得到的细集料图像的小波指数计算得出不同细集料颗粒的像素个数,像素个数数据如表2所示,所述不同细集料颗粒的像素个数按照公式ii计算得出:
[0081][0082]
其中,ca为小波指数。
[0083]
表2图5图像的像素个数的部分数据(由表1数据计算得出)
[0084]
92.0322341.9503366.5929561.2365876.4392884.5473749.4370667.3247869.8747178.73264
[0085]
(单位:pixel)
[0086]
步骤s3、由不同细集料颗粒的像素个数计算得出不同细集料颗粒的实际粒径,所述不同细集料颗粒的像素个数按照公式i计算得出:
[0087]
[0088]
其中,d为细集料颗粒的实际粒径,单位为mm,m为图像放大倍数,ppd为细集料颗粒包含的像素个数,不同细集料颗粒的实际粒径数据如表3所示。
[0089]
表3图5图像中颗粒实际粒径的部分数据(由表2数据计算而来)
[0090]
4.00653.79573.78603.74753.73943.71543.54643.54643.48193.4577
[0091]
(单位:mm)
[0092]
步骤s4、依据不同细集料颗粒的实际粒径在细集料图像中的面积比得出不同粒径细集料颗粒总质量占全部集料颗粒总质量的百分率,百分率部分数据如表4所示;
[0093]
表4图5中颗粒通过百分率部分数据
[0094]
99.982799.965599.948299.931099.913799.896599.879399.862099.844899.8275
[0095]
(单位:%)
[0096]
步骤s5、对采集的图像计算集料颗粒的粒径和细集料颗粒总质量占全部集料颗粒总质量的百分率求平均值,部分数据如表5所示。
[0097]
表5部分平均值数据
[0098]
颗粒粒径(mm)4.02753.93273.81993.75313.6958通过百分率(%)99.98399.965999.948999.931999.9148颗粒粒径(mm)3.65333.65133.60733.59873.5838通过百分率(%)99.897899.880799.863799.846799.8296
[0099]
分析结果评估:
[0100]
将得到的平均值数据导出至excel,在同一坐标系下,将以导出数据绘制得到的细集料粒径分布曲线与传统筛分试验数据绘制得到的细集料粒径分布曲线进行对比。对比结果如图6所示,同一粒径下的测试结果偏差在5%之内。传统试验方法一次试验的总时长约24小时,而本发明由于工作过程只包括集料沉积、图像采集、图像分析三个过程,所以整个试验过程只需15~20分钟,因此,本发明方法大幅度减少了集料颗粒筛分检测的时间,可以有效提高工作效率,降低生产成本。
[0101]
与传统的筛分试验需要采购和保养筛子、天平、烘箱、振动设备相比,本发明结构简单,前期设备投入少,后期维护费用低。
[0102]
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
[0103]
此外,本发明的各种不同的实施方式之间也可进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1