一种自动对准装置的制作方法
[0001]
本发明涉及自动测量技术领域,尤其涉及一种自动对准装置。
背景技术:
[0002]
对准装置用于导弹和探测火箭产品的位置调整,达到该产品的基准轴向与初始轨道中心轴向同轴的位置。一般这类产品的对准装置是由各方向的执行机构和安装机构组成。
[0003]
目前,对准的调节主要是在目测和工具测量等辅助下,通过操作各执行机构,实现对准的目的。这种装置操作繁琐,往往需要多次测量,并根据测量结果反复操作各执行机构。
[0004]
随着自动化生产技术的发展,出现了多种利用图像摄取和自动化位置校正的设备或产品。中国专利公开cn111421528a公开了一种工业机器人的自动化控制系统,该系统通过摄像模块自动采集工业机器人的作业目标图像数据,中央控制模块接收摄像模块的图像,依据内部加载的软件识别目标图像的精确位置,中央控制模块确定目标与机器人工具坐标系的角度和位置偏差,输出控制信号控制高度调整模块和角度调整模块,驱动机器人机械臂抓取作业目标。中国专利公开cn110539309a公开了一种基于激光找正和视觉测量的机械臂制孔定位系统及方法,该系统采用激光测距仪测距,智能相机采集图像数据,由控制系统控制高精度伺服系统精确确定孔位。中国专利公开cn108507403公开了一种基于智能化光电标定技术的自行高炮多轴线一致性检测装置,该装置具有图像采集传输组件,信息处理及显控组件依据接收的高炮炮管中心轴线的激光束指向,和图像采集传输组件采集的图像,计算出火炮轴向的偏差,控制多自由度高精度伺服平台调整轴向的偏差。
[0005]
上述专利均披露了利用图像调整产品位置和轴向的内容。但尚未有导弹和探测火箭类采用这种图像校正产品特定的位置,达到该产品的基准轴向与初始轨道需求同轴的位置。随着产品通用化程度的提升,这种对准装置需要适应多状态多位置的调节,传统的对准装置操作繁琐、人工目视的误差等问题也逐渐暴露出来。
技术实现要素:
[0006]
有鉴于此,本发明的目的在于克服以上现有技术的不足,提出一种导弹和探测火箭产品产品的自动对准装置和自动对准的方法,以解决现有存在的对准装置操作繁琐、人工目视的误差等问题。
[0007]
本发明提供一种支撑车托架上的产品的自动对准装置,所述的产品被放置在在产品的运输支撑车托架上,所述的自动对准装置包括激光测距仪、摄像系统、上下伺服机构、旋转伺服机构、左右伺服机构、前后伺服机构、控制箱、工控机;
[0008]
所述的工控机包括视频转换卡、测量数据输入接口、控制输出接口,存储器和显示器;
[0009]
所述的上下伺服机构、旋转伺服机构、左右伺服机构和前后伺服机构用于执行工
控机的调整指令,调整导弹支撑车托架上使该产品的基准轴向与初始轨道中心轴向同轴;
[0010]
所述的摄像系统的采集画面能够通过视频转换卡输入工控机,并显示在显示器上;所述的显示器还能显示位置采集器上设置的对准坐标;
[0011]
所述的激光测距仪的测量数据经测量数据输入接口输入工控机,工控机根据测量数据和采集画面上的对准基点的位置,自动计算出所述的产品放置在支撑托架上时,该产品的基准轴向与初始轨道中心轴向的各向位置误差,基于计算出的位置误差工控机向所述的上下伺服机构、旋转伺服机构、左右伺服机构、前后伺服机构伺服系统发送指令,控制所述的各个伺服系统执行自动对准。
[0012]
本发明和还提供一种所述的自动对准装置的自动对准方法,包括以下步骤:
[0013]
步骤一,自动对准装置上电自检,工控机启动,开启显示器和摄像系统,将放置在支撑托架上的产品置于摄像系统视场内,
[0014]
步骤二
[0015]
使用摄像系统采集前方的装载着产品的支撑车托架上刻画绘制的对准基点的图像,将显示画面中的所述对准坐标限定在摄像系统的图像采集区域,将采集的画面经过视频转换卡转换并显示在显示器上;
[0016]
步骤三,人工操作图像功能,放大采集的画面上的位置采集器的对准坐标,操作员将采集放大后的对准基点与位置采集器对准坐标叠加,然后点击叠加执行确认;
[0017]
步骤四,工控机(8)读取激光测距仪给出的测量产品的多个测量数据,比较对准基点与位置采集器对准坐标的相互位置差异,工控机根据测量数据和所述的比较结果,给伺服系统发出控制信号,依次驱动左右伺服机构(5)、上下伺服机构(3),使对准装置自动调整到对准位置;
[0018]
步骤五,设置激光测距仪(1)高度与前方的导弹支撑车车架前横梁中心一致;
[0019]
步骤六,操作激光测距仪光束打到产品支撑车车架前横梁坐标面,测得对准装置到坐标面距离,将该数据输入工控机;
[0020]
步骤七,工控机计算从激光测距仪获得的距离数据,得到产品支撑车车架距离偏差数值,确定前后移动的距离;
[0021]
步骤八,工控机从激光测距仪获得的数据计算出两束光的距离差,确定回转角度偏差;
[0022]
步骤九,工控机依据步骤八和步骤九计算得到的距离偏差数值和回转角度,给伺服系统输出控制指令,驱动前后伺服机构、旋转伺服机构,执行自动对准;
[0023]
步骤十,反复多次调整后产品自动对准结束。
[0024]
进一步的,所述的对准基点是十字形状对准标识,位置采集器的对准坐标也是十字形状。
[0025]
进一步的,显示器上显示的位置采集器的对准坐标的标记符号能够在显示画面上被调节放大,放大倍数1-10。
[0026]
进一步的,步骤三到步骤九的对准步骤重复多次执行,直到测距误差和角度误差达到预定的偏差范围内。
[0027]
优选的,显示器上显示的位置采集器的对准坐标的标记符号放大倍数,首次调整时取3倍,后续调整时提高放大量。
[0028]
本发明的自动对准装置操作方便,通过在显示屏点击鼠标即可实现对准的目的,避免了传统的人工调节各执行机构的劳动,并且具有较高的通用性。
附图说明
[0029]
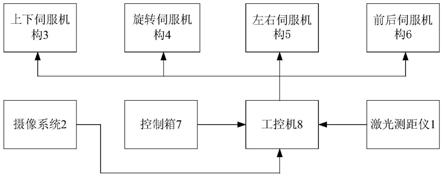
图1是自动对准装置方框图
具体实施方式
[0030]
下面结合附图和具体实施方式对本发明作进一步说明。
[0031]
如附图1所示。本发明提供一种自动对准装置,所述的自动对准装置由激光测距仪1、摄像系统2、上下伺服机构3、旋转伺服机构4、左右伺服机构5、前后伺服机构6、控制箱7、工控机8等部分组成,工控机8包括视频转换卡、测量数据输入接口、控制输出接口和显示器。
[0032]
所述的摄像系统2的采集画面能够通过视频转换卡输入工控机8,并显示在显示器上。激光测距仪1的测量数据经测量数据输入接口输入工控机8,工控机8向各个伺服系统发送指令,执行自动对准。
[0033]
摄像系统2采集前方的导弹支撑车托架上的对准基点,所述的对准基点可以是十字对准坐标,对准坐标全部进入采集区域,将采集画面经过视频转换卡转换,显示器显示出采集画面,将画面上的对准坐标放大3倍,位置采集器设有对准坐标,操作员将图像采集放大后的对准坐标与采集器对准坐标点击叠加。确认后,通过工控机8给伺服系统指令信号,系统先后驱动左右伺服机构5、上下伺服机构3,使对准装置自动调整到对准位置。
[0034]
激光测距仪1高度与前方支撑车车架前横梁中心一致,激光测距仪光束打到导弹支撑车车架前横梁坐标面,测得对准装置到坐标面距离,通过计算,得到位置偏差值,确定前后移动的距离。同时,计算出两束光的距离差,确定回转角度。通过工控机8向伺服系统发送指令,系统驱动前后伺服机构6、旋转伺服机构4,完成自动对准。
[0035]
实施例一,所述的自动对准装置的自动对准方法包括执行以下步骤:
[0036]
步骤1,图像采集:
[0037]
使用摄像系统采集前方的导弹支撑车托架上的对准基点,将对准坐标限定在采集区域,将采集画面经过视频转换卡转换,显示器显示出采集画面;
[0038]
步骤2,将显示器显示画面上的对准坐标放大3倍,位置采集器设有对准坐标,操作员将采集放大后的对准坐标与位置采集器对准坐标点击叠加确认;所述的对准基点是十字对准坐标。
[0039]
步骤3,确认后,工控机8给伺服系统发出控制信号,系统先后驱动左右伺服机构5、上下伺服机构3,使对准装置自动调整到对准位置。
[0040]
步骤4,设置激光测距仪1高度与前方的导弹支撑车车架前横梁中心一致;
[0041]
步骤5,操作激光测距仪光束打到导弹支撑车车架前横梁坐标面,测得对准装置到坐标面距离,将该数据输入工控机;
[0042]
步骤6,工控机计算从激光测距仪获得的数据,得到位置偏差值,确定前后移动的距离;
[0043]
步骤7,工控机从激光测距仪获得的数据计算出两束光的距离差,确定回转角度;
[0044]
步骤8,工控机依据计算所得的位置偏差值和回转角度,给伺服系统输出控制指令,驱动前后伺服机构、旋转伺服机构,完成自动对准。
[0045]
本发明与现有技术相比,采用图像识别原理,并辅助于激光测距仪,结合图像叠加、远程分析技术完成自动瞄准,各执行机构采用伺服电机驱动,给伺服系统指令信号后,驱动各执行机构,达到自动对准的目的。
[0046]
上述自动对准装置操作方便,通过在显示屏点击鼠标即可实现对准的目的,避免了传统的人工调节各执行机构的劳动,并且具有较高的通用性。
[0047]
某通用目标模拟器对准装置采用自动对准装置,可以实现多型多状态之间的快速转化调节,设备在某海军修理厂交付使用,使用效果得到好评。
[0048]
上述实例仅用以说明本发明的技术方案而非对其进行限制,尽管参照最佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1