一种管道内检测器实时监控系统及方法与流程
[0001]
本发明涉及管道内检测器实时监控技术领域,尤其涉及一种管道内检测器实时监控系统及方法。
背景技术:
[0002]
管道内检测器工作长期处于管道内部,现有技术只能通过将内检测器放入管道中进行工作,之后将监测的数据进行统一的处理分析,而不能通过实时的对管道内检测器进行监控。而且管道内检测器在密闭的管道中,加上油管上的垃圾或者转弯时可能会使内检测器发生卡堵现象,如若卡的时间过长,它的电量很快将耗尽,给检测工作带来极大的不便和麻烦,使得检测器不能顺利达到检测要求,甚至造成检测质量下降。
技术实现要素:
[0003]
针对现有技术的不足,本发明提供一种管道内检测器实时监控系统及方法,在保证安全高质量地完成监测工作的基础上,防止管道内检测器发生卡堵现象,延长内检测器在管道中的工作时间,实时的获取管道缺陷数据以及内检测器的实时运行状态;
[0004]
本发明所采取的技术方案是:
[0005]
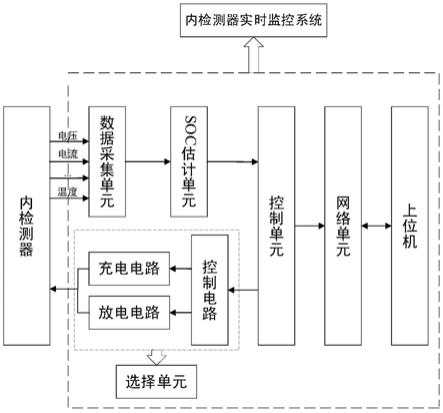
一方面,一种管道内检测器实时监控系统,包括数据采集单元、soc估计单元、控制单元、网络单元、上位机、选择单元;
[0006]
所述数据采集单元采集管道内检测器的检测数据,并与所述soc估计单元、控制单元、网络单元依次串行连接,所述上位机管道内检测器通过无线通讯连接,所述网络单元同时与控制单元以及上位机双向连接,控制单元输出端连接所述选择单元输入端,选择单元输出端连接至管道内检测器;
[0007]
所述数据采集单元包括电压传感器、电流传感器、温度传感器、速度传感器、里程传感器、信号调理电路以及模数转换器;所述电压传感器、电流传感器、温度传感器、速度传感器、里程传感器检测到电压信号、电流信号、温度信号、速度信号、里程信号,将上述所有信号输出至信号调理电路,信号调理电路信号传输至模数转换器,模数转换器将信号数字化并传输至soc估计单元;
[0008]
所述soc估计单元包括soc估计单元处理器模块以及电池组剩余电量估计模型;
[0009]
所述网络单元包括网络单元处理器、gprs模块;其中所述gprs模块为物联网无线数据终端,利用公用gprs网络为用户提供无线、长距离数据传输功能,所述网络单元处理器用于打包从控制单元接收到的数据,同时将gprs模块从上位机接收到的控制内检测器发电机工作方式的操作指令传送到控制单元;
[0010]
所述选择单元,包含控制电路、充电电路以及放电电路,所述控制单元连接控制电路,控制电路同时连接充电电路与放电电路。
[0011]
另一方面,一种管道内检测器实时监控方法,基于前述一种管道内检测器实时监控系统实现,包括以下步骤:
[0012]
步骤1:对数据采集单元的电压传感器、电流传感器、温度传感器、速度传感器、里程传感器、模数转换器进行初始化并进行参数设置,并为电压传感器、电流传感器、温度传感器、速度传感器、里程传感器进行id分配;
[0013]
步骤2:建立信号传输通道模型,在管道内检测器和上位机链路建立信号传输通道模型,除了存在无线信道衰落,还存在链路的铁损耗、水损耗对传输信号的影响,信号传输通道模型如下式所示:
[0014]
f=h/l
[0015]
其中f表示管道内检测器和上位机的信道响应,h为传输信号的起始状态,l表示信道的路径损耗;
[0016]
步骤3:构建信号模型:信号传输采用gprs模式在管道内检测器和上位机之间进行双向通信,上位机接收信号y
m
(t)为:
[0017]
y
m
(t)=h1/l1+n(t)
[0018][0019]
其中,l1为管道内检测器与上位机之间传递信号的路径损耗;h1为管道内检测器与上位机链路的发射信号;n(t)是均值为0的白噪声,t是信号传输时间;λ表示信号波长,d表示信号传输距离,g
w
和g
fe
分别表示水损耗系数和铁损耗系数;
[0020]
步骤4:将电压传感器、电流传感器、温度传感器、速度传感器、里程传感器的检测数据实时的发送给soc估计单元,进行管道内检测器的剩余电量的估算;
[0021]
步骤4.1:建立管道内检测器电池组的二阶电池模型;
[0022]
步骤4.1.1:建立管道内检测器电池组模型的微分方程,如附图图4:
[0023]
设r为电池的等效欧姆内阻,r1和r2分别为电池电化学极化和浓差极化产生的等效内阻,r1和c1等效为锂离子电极间传输时受到的阻抗,u1为r1和c1两端的电压值,r2和c2等效为锂离子在电极材料中扩散时受到的阻抗,u2为r2和c2两端的电压值,u(t)表示电池的端电压。由戴维南定理得到以下的公式:
[0024][0025][0026]
u(t)=f(s,t)-u1(t)-u2(t)-ri(t)+v(t)
[0027]
式中,和分别表示电压u1和u2微分;i(t)表示电流;s表示soc大小;t为采样时刻;f(s,t)表示ocv和soc的函数关系,ocv为电池的开路电压;v(t)为计算过程产生的观测噪声。
[0028]
步骤4.1.2:对步骤4.1.1中公式进行离散化:
[0029][0030]
[0031]
u(k)=f(s,k)-i(k)r-u1(k)-u2(k)+v(k)
[0032]
式中:τ1=r1c1,τ2=r2c2[0033]
步骤4.2:采用bp神经网络法计算soc值,其中,神经网络的3个输入量为电压、电流以及温度值,输出为soc值,如下式所示;
[0034][0035][0036]
x
j
=[i
t
,u
t
,t
t
]
t
[0037]
其中,x
i
为输入,i
t
,u
t
,t分别为t时刻电流传感器、电压传感器、温度传感器的数值,y
h
为隐含层输出,s
t
为soc值,v
ih
为输入层与隐含层之间的权重,θ1,θ2为偏置量,w
h
为隐含层与输出层之间的权重,f为单极性sigmoid函数;
[0038]
步骤4.3:随着管道内检测器监测工作的进行,电池组剩余电量不断减小,根据soc随时间变化的特性曲线,判断当soc在0.4~0.8之间时,选择采用ah积分法计算soc值;
[0039]
步骤4.4:使用ah积分法来计算soc值,如下式所示:
[0040][0041]
其中,c
n
为电池额定容量;i(t)为电池t时刻电流;η为修正因子;s(t0)为ah积分法对应的初始soc,由bp神经网络求得,s(t)表示t时刻的soc。
[0042]
步骤:4.5:判断soc的值是否处于0.4~0.8,若是,执行步骤4.2,若否,执行步骤4.6;
[0043]
步骤4.6:得到管道内检测器电池组的soc;
[0044]
步骤5:将电流传感器、电压传感器、温度传感器、速度传感器、里程传感器的数据以及soc值上传到控制单元;
[0045]
步骤6:控制单元根据接收到的数据进行分析做出控制决策并发送给选择单元,选择单元根据控制决策使发电机工作在相应的状态;控制单元并将做出的控制决策数据与上述接收到的数据发送给网络单元,网络单元将接收到的数据进行打包,并利用sm4分组密码算法进行加密:
[0046]
所述打包数据:p
t
=[t,i
t
,u
t
,t
t
,v
t
,l
t
,s
t
,c
t
]
[0047]
p
t
'=e(p
t
)
[0048]
其中i
t
,u
t
,t
t
,v
t
,l
t
为分别为t时刻电流传感器、电压传感器、温度传感器、速度传感器、里程传感器的数据,s
t
为t时刻的soc值,c
t
为t时刻控制单元所作出的控制决策;p
t
为打包后的数据包;e为sm4分组密码算法;p
t
'为加密后的数据包。
[0049]
步骤7:网络单元通过gprs模块以无线方式将加密数据传送给上位机,上位机收到管道内检测器的信号y1(t),表示为
[0050]
y1(t)=p
t
'/l1+n(t)
[0051]
[0052]
其中p
t
'为加密后的数据包,l1为上位机与管道内检测器之间传递信号的路径损耗,n(t)是均值为0的白噪声;t是信号传输时间;λ表示信号波长,d表示信号传输距离,g
w
和g
fe
分别表示水损耗系数和铁损耗系数;根据信号传输通道模型,对接收到的y1(t)进行传输损耗补偿,得到原始数据p
t
'。
[0053]
步骤8:上位机对接收到的数据利用sm4分组密码算法的解密算法d进行解密:p
t
=d(p
t
')即上位机得到解密后的数据p
t
。
[0054]
步骤9:对数据p
t
进行处理、存储和分析,实时监测管道内检测器的状态,并根据管道内检测器的实时状态来控制内检测器发电机的工作方式,包括发电方式和防卡方式;
[0055]
步骤10:上位机与管道内检测器进行数据交换,内检测器接收到的信号y2(t)表示为:
[0056]
y2(t)=d
t
/l1+n(t)
[0057][0058]
其中d
t
为上位机控制决策数据包;l1为上位机与管道内检测器之间传递信号的路径损耗,n(t)是均值为0的白噪声;t是信号传输时间;λ表示信号波长;d表示信号传输距离;g
w
和g
fe
分别表示水损耗系数和铁损耗系数;根据信号传输通道模型,对接收到的y2(t)进行传输损耗补偿,得到原始数据d
t
。上位机控制决策通过数据包的形式发送给管道内检测器;
[0059]
步骤11:网络单元接受控制决策数据包,并由控制单元识别控制决策并发出指令,选择单元根据指令切换发电机工作方式。从而实现管道内检测器的实时监控。
[0060]
采用上述技术方案所产生的有益效果在于:
[0061]
本发明提出一种管道内检测器实时监控系统及方法,可以实时监控管道内检测器的工作状态:可以获取内检测器电池组的电流、电压、温度、soc参数,可以得知内检测器的当前速度以及大概位置。可以在内检测器发生卡堵时,通过改变内检测器发电机工作方式,使其前进。
附图说明
[0062]
图1为本发明的整体实时监控系统框图;
[0063]
图2为本发明的实时监控方法流程图;
[0064]
图3为本发明实施例的soc估算流程图;
[0065]
图4为本发明实施例的二阶电池模型示意图;
[0066]
图5为本发明实施例的转换控制流程图;
[0067]
图6为本发明实施例的选择单元电路图。
具体实施方式
[0068]
下面结合附图对本发明具体实施方式加以详细的说明。
[0069]
一方面,一种管道内检测器实时监控系统,如图1所示,包括数据采集单元、soc估计单元、控制单元、网络单元、上位机、选择单元;
[0070]
所述数据采集单元采集管道内检测器的检测数据,并与所述soc估计单元、控制单元、网络单元依次串行连接,所述上位机管道内检测器通过无线通讯连接,所述网络单元同
时与控制单元以及上位机双向连接,控制单元输出端连接所述选择单元输入端,选择单元输出端连接至管道内检测器;
[0071]
所述数据采集单元包括电压传感器、电流传感器、温度传感器、速度传感器、里程传感器、信号调理电路以及模数转换器;所述电压传感器、电流传感器、温度传感器、速度传感器、里程传感器检测到电压信号、电流信号、温度信号、速度信号、里程信号,将上述所有信号输出至信号调理电路,信号调理电路信号传输至模数转换器,模数转换器将信号数字化并传输至soc估计单元;
[0072]
其中电压传感器,负责采集内检测器电池组电压信号;电流传感器,负责采集内检测器电池组电流信号;温度传感器,负责采集管道内检测器温度、电池组温度信号;速度传感器,负责采集内检测器前进速度;里程传感器,负责采集管道内检测器已经行进的距离;信号调理电路,负责接收电压、电流、温度、速度、里程信号,并对信号进行放大和滤波;模数转换器,负责将调理过的各种模拟信号值转换成数字信号,并将其传递给控制单元;
[0073]
本实施例中,温度传感器采用tmp36grtz,其主要技术参数如下:
[0074]
(1)检测温度-本地:-40℃~125℃
[0075]
(2)输出类型:模拟电压
[0076]
(3)电压-电源:2.7v~5.5v
[0077]
(4)分辨率:10mv/℃
[0078]
(5)特性:关断模式
[0079]
(6)精度-最高(最低):
±
3℃(
±
4℃)
[0080]
本实施例中,电流传感器采用acs712elctr-20a-t,其主要技术参数如下:
[0081]
(1)电流-检测:30a
[0082]
(2)通道数:1
[0083]
(3)灵敏度:66mv/a
[0084]
(4)频率:dc~80khz
[0085]
(5)线性度:
±
1.5%
[0086]
(6)精度:
±
1.5%
[0087]
(7)电压-电源:5v
[0088]
(8)响应时间:5μs
[0089]
(9)工作温度:-40℃~85℃
[0090]
本实施例中,电压传感器采用霍尔电压传感器,其主要技术参数如下:
[0091]
(1)检测范围:0v~75v
[0092]
(2)输出类型:模拟电压
[0093]
(3)电压-电源:2.7v~5.5v
[0094]
(4)分辨率:20mv
[0095]
本实施例中,里程传感器采用gp2y0a51sk0f传感器,其主要技术参数如下:
[0096]
(1)供电电压:-0.3v~7v
[0097]
(2)工作温度:-10℃~60℃
[0098]
(3)电压-电源:4.5v~5.5v
[0099]
(4)供电电流:12~22ma
[0100]
本实施例中,速度传感器采用hall sensor传感器,其主要技术参数如下:
[0101]
(1)输出类型:数字量或模拟量
[0102]
(2)工作温度:-10℃~65℃
[0103]
(3)电压-电源:2.3v~5.53v
[0104]
(4)功能:判断电机转速与方向
[0105]
所述上位机,用于接收并存储网络单元发送的数据信号,再将数据信号进行分析与处理,达到实时监控管道内检测器的运行状态的目的。
[0106]
所述soc估计单元包括soc估计单元处理器模块以及电池组剩余电量估计模型,根据建立好的电池soc估计模型,计算电池组剩余电量;
[0107]
所述网络单元包括网络单元处理器、gprs模块;其中所述gprs模块为物联网无线数据终端,型号为f2114 gprs ip modem,利用公用gprs网络为用户提供无线、长距离数据传输功能,所述网络单元处理器用于打包从控制单元接收到的数据,同时将gprs模块从上位机接收到的控制内检测器发电机工作方式的操作指令传送到控制单元;
[0108]
本实施例中,网络单元的技术指标要求如下:
[0109]
(1)采样频率范围:1-10khz;
[0110]
(2)驱动电压:3.3v及5v;
[0111]
(3)采样信号的通道数:至少8路;
[0112]
(4)采样精度:大于等于0.01;
[0113]
(5)通信方式:zigbee、以太网通信;
[0114]
(6)供电方式:12v供电。
[0115]
所述选择单元如图6所示,根据上位机发出的指令,切换发电机的工作方式,包括发电方式和防卡方式,包含控制电路、充电电路以及放电电路,所述控制单元连接控制电路,控制电路同时连接充电电路与放电电路。所述控制电路,根据接收到的操作指令,转换管道内检测器发电机的工作状态是发电状态还是防卡状态;所述充电电路,用于将发电机发出的电能经滤波后传递给电池组;所述放电电路,用于管道内检测器处于防卡的工作状态时,是发电机承受正向电压,处于电动机的工作状态;
[0116]
另一方面,一种管道内检测器实时监控方法,如图2所示,基于前述一种管道内检测器实时监控系统实现,包括以下步骤:
[0117]
步骤1:对数据采集单元的电压传感器、电流传感器、温度传感器、速度传感器、里程传感器、模数转换器进行初始化并进行参数设置,并为电压传感器、电流传感器、温度传感器、速度传感器、里程传感器进行id分配;
[0118]
步骤2:建立信号传输通道模型,在管道内检测器和上位机链路建立信号传输通道模型,除了存在无线信道衰落,还存在链路的铁损耗、水损耗对传输信号的影响,信号传输通道模型如下式所示:
[0119]
f=h/l
[0120]
其中f表示管道内检测器和上位机的信道响应,h为传输信号的起始状态,l表示信道的路径损耗;
[0121]
步骤3:构建信号模型:信号传输采用gprs模式在管道内检测器和上位机之间进行双向通信,上位机接收信号y
m
(t)为:
[0122]
y
m
(t)=h1/l1+n(t)
[0123][0124]
其中,l1为管道内检测器与上位机之间传递信号的路径损耗;h1为管道内检测器与上位机链路的发射信号;n(t)是均值为0的白噪声,t是信号传输时间;λ表示信号波长,d表示信号传输距离,g
w
和g
fe
分别表示水损耗系数和铁损耗系数;
[0125]
在本实例中,g
w
设定为0.4,g
fe
设定为0.8,波长λ设定为1000m;
[0126]
步骤4:将电压传感器、电流传感器、温度传感器、速度传感器、里程传感器的检测数据实时的发送给soc估计单元,进行管道内检测器的剩余电量的估算,如图3所示;
[0127]
步骤4.1:建立管道内检测器电池组的二阶电池模型;
[0128]
步骤4.1.1:建立管道内检测器电池组模型的微分方程,如图4所示:
[0129]
设r为电池的等效欧姆内阻,r1和r2分别为电池电化学极化和浓差极化产生的等效内阻,r1和c1等效为锂离子电极间传输时受到的阻抗,u1为r1和c1两端的电压值,r2和c2等效为锂离子在电极材料中扩散时受到的阻抗,u2为r2和c2两端的电压值,u(t)表示电池的端电压。由戴维南定理得到以下的公式:
[0130][0131][0132]
u(t)=f(s,t)-u1(t)-u2(t)-ri(t)+v(t)
[0133]
式中,和分别表示电压u1和u2微分;i(t)表示电流;为s表示soc大小;t为采样时刻;f(s,t)表示ocv和soc的函数关系,ocv为电池的开路电压;v(t)为计算过程产生的观测噪声。
[0134]
步骤4.1.2:对步骤4.1.1中公式进行离散化:
[0135][0136][0137]
u(k)=f(s,k)-i(k)r-u1(k)-u2(k)+v(k)
[0138]
式中:τ1=r1c1,τ2=r2c2,在本实例中,经建立的电池二阶等效电路,得到电池组的初始电量为0.97;
[0139]
步骤4.2:采用bp神经网络法计算soc值,其中,神经网络的3个输入量为电压、电流以及温度值,输出为soc值,如下式所示;
[0140][0141]
[0142]
x
j
=[i
t
,u
t
,t
t
]
t
[0143]
其中,x
i
为输入,i
t
,u
t
,t分别为t时刻电流传感器、电压传感器、温度传感器的数值,y
h
为隐含层输出,s
t
为soc值,v
ih
为输入层与隐含层之间的权重,θ1,θ2为偏置量,w
h
为隐含层与输出层之间的权重,f为单极性sigmoid函数;
[0144]
步骤4.3:随着管道内检测器监测工作的进行,电池组剩余电量不断减小,根据soc随时间变化的特性曲线,判断当soc在0.4~0.8之间时,选择采用ah积分法计算soc值;
[0145]
步骤4.4:使用ah积分法来计算soc值,如下式所示:
[0146][0147]
其中,c
n
为电池额定容量;i(t)为电池t时刻电流;η为修正因子;s(t0)为ah积分法对应的初始soc,由bp神经网络求得,s(t)表示t时刻的soc。
[0148]
在本实例中,c
n
设定为4*3600mah;
[0149]
步骤:4.5:判断soc的值是否处于0.4~0.8,若是,执行步骤4.2,若否,执行步骤4.6;
[0150]
步骤4.6:得到管道内检测器电池组的soc;
[0151]
步骤5:将电流传感器、电压传感器、温度传感器、速度传感器、里程传感器的数据以及soc值上传到控制单元;
[0152]
步骤6:控制单元根据接收到的数据进行分析做出控制决策并发送给选择单元,选择单元根据控制决策使发电机工作在相应的状态;控制单元并将做出的控制决策数据与上述接收到的数据发送给网络单元,网络单元将接收到的数据进行打包,并利用sm4分组密码算法进行加密:
[0153]
所述打包数据:p
t
=[t,i
t
,u
t
,t
t
,v
t
,l
t
,s
t
,c
t
]
[0154]
p
t
'=e(p
t
)
[0155]
其中i
t
,u
t
,t
t
,v
t
,l
t
为分别为t时刻电流传感器、电压传感器、温度传感器、速度传感器、里程传感器的数据,s
t
为t时刻的soc值,c
t
为t时刻控制单元所作出的控制决策;p
t
为打包后的数据包;e为sm4分组密码算法;p
t
'为加密后的数据包。
[0156]
步骤7:网络单元通过gprs模块以无线方式将加密数据传送给上位机,上位机收到管道内检测器的信号y1(t),表示为
[0157]
y1(t)=p
t
'/l1+n(t)
[0158][0159]
其中p
t
'为加密后的数据包,l1为上位机与管道内检测器之间传递信号的路径损耗,n(t)是均值为0的白噪声;t是信号传输时间;λ表示信号波长,d表示信号传输距离,g
w
和g
fe
分别表示水损耗系数和铁损耗系数;根据信号传输通道模型,对接收到的y1(t)进行传输损耗补偿,得到原始数据p
t
'。
[0160]
步骤8:上位机对接收到的数据利用sm4分组密码算法的解密算法d进行解密:p
t
=d(p
t
')即上位机得到解密后的数据p
t
。
[0161]
步骤9:对数据p
t
进行处理、存储和分析,实时监测管道内检测器的状态,并根据管道内检测器的实时状态来控制内检测器发电机的工作方式,包括发电方式和防卡方式;
[0162]
步骤10:上位机与管道内检测器进行数据交换,内检测器接收到的信号y2(t)表示为:
[0163]
y2(t)=d
t
/l1+n(t)
[0164][0165]
其中d
t
为上位机控制决策数据包;l1为上位机与管道内检测器之间传递信号的路径损耗,n(t)是均值为0的白噪声;t是信号传输时间;λ表示信号波长;d表示信号传输距离;g
w
和g
fe
分别表示水损耗系数和铁损耗系数;根据信号传输通道模型,对接收到的y2(t)进行传输损耗补偿,得到原始数据d
t
。上位机控制决策通过数据包的形式发送给管道内检测器;
[0166]
步骤11:网络单元接受控制决策数据包,并由控制单元识别控制决策并发出指令,选择单元根据指令切换发电机工作方式,如图5所示,从而实现管道内检测器的实时监控。
[0167]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明权利要求所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1