一种自带加速度传感器的毫米波雷达、机动车辆及车速解算的方法与流程
[0001]
本发明涉及毫米波雷达技术领域,特别是涉及一种自带加速度传感器的毫米波雷达、机动车辆及车速解算的方法。
背景技术:
[0002]
毫米波雷达在汽车应用实现盲区预警(bsd)、换道辅助(lca)过程中,需要获取本车车身的姿态和运行速度信息,用于对雷达的启动时机和告警策略进行判定。
[0003]
目前在汽车前装市场,多采用can总线获取所需要的车身参数,如车速、档位、转向灯和转向加速度等信号,但是根据车型的不同(主要是车辆设计的差异)会缺失分信号,如转向加速度。如何获取车身can总线不具备的信号提升雷达的性能成为了毫米波雷达进一步优化性能的关键。对于汽车后装市场,由于没有车厂开发的can信号,如何获取车身的参数(比如车速)成为了毫米波雷达应用的关键问题。
[0004]
由上述可知,无论是在车身的前装市场还是在后装市场,如何获取完整的车身参数为毫米波雷达应用的关键问题。目前主流的方案为采用通用的obd模块获取车身参数,经过解码后发送给毫米波雷达。比如公开号为cn109263556a的中国发明专利申请公开的一种车用毫米波变道预警系统、公开号为cn107472131a的中国发明专利申请公开的一种汽车开门预警的方法,均采用obd解码方式获取车身信息。但是obd解码工作本身非常复杂,通常需要一个专用的解码装置,成本较高,且无法适用于所有车厂和车型,部分车型仍然无法获取完整的车身参数,因为部分车身参数不会在obd接口上开放,由此可知采用obd模块。
技术实现要素:
[0005]
本发明的第一目的旨在提供一种自带加速度传感器的毫米波雷达,其稳定性高,受外界环境影响小,障碍物信息检测准确;本发明的第一目的采用以下的技术方案实现:
[0006]
一种自带加速度传感器的毫米波雷达,其特征在于,包括加速度传感器、雷达传感器、处理控制单元;所述速度传感器、所述雷达传感器、所述处理控制单元集成在一块pcb板上;所述加速度传感器的信号输出端连接所述处理控制单元的第一信号输入端;所述毫米波雷达的信号输出端连接所述处理控制单元的第二信号输入端;所述处理控制单元的控制输出端连接所述毫米波雷达的信号输入端。
[0007]
具体地,所述毫米波雷达包括毫米波发送天线、毫米波接收天线、射频微波电路;
[0008]
所述射频微波电路包括射频信号发送单元以及射频信号接收单元;所述处理控制单元的射频信号输出端连接所述射频信号发送单元的信号输入端;所述处理控制单元的射频信号接收端连接所述射频信号接收单元的信号输出端;所述毫米波发送天线连接所述射频信号发送单元的信号输出端,所述毫米波接收天线连接所述射频信号接收单元的信号输入端;所述射频信号发射单元的信号控制输出端连接所述射频信号接收单元的信号控制输出端。
[0009]
进一步地,所述处理控制单元包括adc转换模块、dac转换模块;所述射频信号发送单元的信号输入端连接dac转换模块的信号输出端,所述射频信号接收单元的信号输出端连接adc转换模块的信号输入端;所述毫米波雷达的信号输出端为所述射频信号接收单元的信号输出端,所述毫米波雷达第二信号输入端为所述射频信号发送单元的信号输入端。
[0010]
进一步地,所述处理控制单元包括加速度积分器、坐标解算单元,所述加速度传感器的信号输出端连接所述加速度积分器的信号输入端,所述加速度积分器的输出端连接所述坐标解算单元的输入端。
[0011]
具体地,所述射频信号接收单元包括射频信号接收芯片、两路中频放大器;所述毫米波接收天线连接所述射频接收芯片的信号输入端;所述射频信号接收芯片的两个信号输出端对应连接两路所述中频放大器的输入端;两路所述中频放大器的输出端与所述adc转换模块的两个信号输入端对应连接;
[0012]
所述射频信号发送单元包括射频信号发送芯片、两路滤波器,所述dac转换模块包括两个dac子模块;两路所述滤波器的信号输入端与两个dac子模块的信号输出端对应连接;两路所述滤波器的信号输出端与所述射频信号发送芯片的两个信号输入端对应连接;所述射频发射芯片的信号控制输出端连接所述射频接收芯片的信号控制输出端。
[0013]
进一步地,还包括给所述处理控制单元提供合适电源的电源管理模块,所述电源管理模块的输入端连接外部电源。
[0014]
具体地,所述加速度传感器为六轴运动传感器。
[0015]
本发明的第二目的旨在提供一种机动车辆,包括动力系统,其特征在于,还包括第一目的的技术方案所述的毫米波雷达。
[0016]
本发明的第三目的旨在提供一种使用第一目的的技术方案所述的毫米波雷达进行车速解算的方法,其特征在于,包括以下步骤:
[0017]
s1、通过所述加速度传感器获取车辆的加速度信息;通过所述雷达传感器获取所述障碍物参数;所述障碍物参数包括障碍物速度;所述加速度信息包括各轴的加速度;
[0018]
s2、所述处理控制单元包括加速度积分器,车辆静止状态下,所述加速度积分器的积分基准为零;所述加速度积分器将所述加速度信息进行积分运算以获取初始车速。
[0019]
具体地,步骤s2具体包括:
[0020]
s21、根据所述障碍物参数判断是否有负速度目标的存在;如果没有则执行步骤s22;如果有则执行步骤s23;
[0021]
s22、如果加速度传感器的加速度信息为0,可以判定车辆处于静止状态,此时所述加速度积分器的积分基准清零;如果加速度传感器的加速度信息不为0,则加速度积分器继续实施步骤s21;
[0022]
s23、此时将所述障碍物速度与加速度积分器的积分计算所得到的车速信息进行比较,如果两者的误差小于一个规定的误差值,则选择当前加速度积分器所得到的车速信息作为当前车辆运动车速,继续执行步骤s21;如果两者误差超过规定的误差值,则执行步骤s24;
[0023]
s24、当加速度传感器的加速度信息为0时,通过所述雷达传感器测定n次所述障碍物速度,求n次所述障碍物速度的平均值,将平均值作为当前车辆运动车速,继续执行步骤s21。
[0024]
本发明的有益技术效果:
[0025]
本发明的雷达传感器以及应用该雷达传感器的车速解算方法,摒弃了现有技术中采用obd技术进行车身参数获取的方式,通过加速度传感器来进行车身的各个轴的加速度的检测,通过加速度的积分计算来获取车辆的速度;同时结合雷达传感器检测的障碍物参数,能够实时的对车速进行实施校准,能够准确的给车辆的控制提供完整的参数支持,弥补了现有技术中车身参数采集不完整的缺陷;其中雷达传感器一体化设置,结构小巧,不会占用太多的空间。
附图说明
[0026]
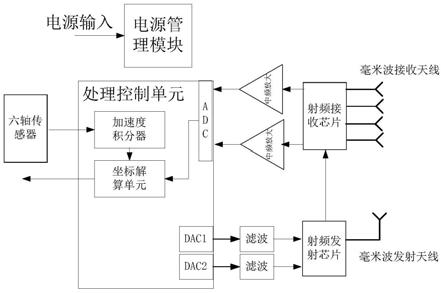
图1是本发明实施例提供的雷达传感器的结构框图;
[0027]
图2是本发明实施例提供的雷达传感器的工作流程图。
具体实施方式
[0028]
为了更加清楚地理解本发明的技术方案,以下结合附图与具体实施例对本发明作进一步说明。
[0029]
需要指出的是,除非另有指明,本方案使用的所有技术和科学术语具有与本方案所属技术领域的普通技术人员通常理解的相同含义。
[0030]
结合图1,本发明的毫米波雷达传感器包括加速度传感器、雷达传感器、处理控制单元;加速度传感器的信号输出端连接处理控制单元的第一信号输入端;雷达传感器的信号输出端连接所述处理控制单元的第二信号输入端(本实施例中处理控制单元的第二信号输入端为两个);所述处理控制单元的控制输出端连接所述雷达传感器的信号输入端。
[0031]
本发明中采用加速度传感器采用的是多轴mems传感器,更具体的加速度传感器是采用六轴运动传感器(即六轴加速度传感器)以便于对车辆各个方向的动态信息(加速度信息)进行检测。六轴运动传感器有多个轴,其中与车辆前进方向相同的轴的加速度可积分计算得到车速。与车辆前进方向垂直的轴计算可得到转向加速度。
[0032]
雷达传感器包括毫米波发送天线、毫米波接收天线、射频微波电路;射频微波电路包括射频信号发送单元以及射频信号接收单元;所述处理控制单元的射频信号输出端连接所述射频信号发送单元的信号输入端;所述处理控制单元的射频信号接收端连接所述射频信号接收单元的信号输出端;所述毫米波发送天线连接所述射频信号发送单元的信号输出端,所述毫米波接收天线连接所述射频信号接收单元的信号输入端;所述射频信号发射单元的信号控制输出端连接所述射频信号接收单元的信号控制输出端。
[0033]
处理控制单元包括adc转换模块、dac转换模块;所述射频信号发送单元的信号输入端连接dac转换模块的信号输出端,所述射频信号接收单元的信号输出端连接adc转换模块的信号输入端;所述雷达传感器的信号输出端为所述射频信号接收单元的信号输出端,所述毫米波雷达第二信号输入端为所述射频信号发送单元的信号输入端。
[0034]
具体的,射频信号接收单元包括射频信号接收芯片、两路中频放大器;所述毫米波接收天线连接所述射频接收芯片的信号输入端;所述射频信号接收芯片的两个信号输出端对应连接两路所述中频放大器的输入端;两路所述中频放大器的输出端与所述adc转换模块的两个信号输入端对应连接。
[0035]
射频信号发送单元包括射频信号发送芯片、两路滤波器,所述dac转换模块包括两个dac子模块;两路所述滤波器的信号输入端与两个dac子模块的信号输出端对应连接;两路所述滤波器的信号输出端与所述射频信号发送芯片的两个信号输入端对应连接;所述射频发射芯片的信号控制输出端连接所述射频接收芯片的信号控制输出端。
[0036]
本实施例的毫米波雷达能够通过发射24ghz或者77ghz毫米波,实现目标的距离、速度和角度探测。毫米波发送天线用于实现毫米波雷达的射频信号的发射、毫米波接收天线用于实现毫米波雷达的射频信号的接收;射频微波电路包含发射信号产生、混频和接收放大等电路,实现雷达传感器信号的发射和接收。
[0037]
本实施例中,通过加速度传感器来进行车身加速度参数的采集;通过雷达传感器来进行障碍物参数的采集;其中车身加速度参数包括车身各个方向的加速度和转向加加速度等;障碍物参数包括障碍物相对于车身的速度、方位等。
[0038]
处理控制单元用来控制发射信号的波形,同时对接收来自射频信号接收单元的反馈信号进行采集和处理,计算得到目标(障碍物)相对雷达的距离等障碍物参数;处理控制单元通过总线与加速度传感器连接,获取加速度传感器所采集的车身加速度参数;处理控制单元根据上述障碍物参数与车身加速度参数来确定车辆的工作模式和告警策略。
[0039]
在现有技术的方案中,通过obd能够直接获取车辆的速度信息,从而将车辆的速度信息作为后续告警策略选择的信息基础;而本实施例的方案中,加速度传感器获取到的是车身的加速度信息,并不能直接获取到车身的速度信息;而处理控制单元进行告警策略选择的所需要的是车辆的速度,因此本实施例的处理控制单元还将加速度传感器的车身加速度参数和雷达传感器检测的障碍物参数融合来进行车速的计算;具体地其通过一种高精度和高稳定度的算法,结合障碍物参数对加速度传感器的采集的加速度信息进行精确解算和误差消除,从而实现汽车运动过程中的对雷达姿态(车身姿态即雷达姿态,因为雷达与车身是相对固定的关系)的精确计算。
[0040]
具体地,参考图2,使用本身请的雷达进行车辆的工作模式和告警策略的方法如下:
[0041]
s1、通过加速度传感器获取车辆的加速度参数,通过雷达传感器获得障碍物参数;其中雷达传感器的数据获取通过发射雷达波,然后接收回波信号,从而获取雷达传感器检测到的障碍物的参数;其中,障碍物参数包括障碍物速度、角度;
[0042]
s2、通过加速度积分器对加速度传感器获取的加速度信息进行积分计算,以获取准确的车速参数;本步骤还包括对车速参数的误差消除计算,采用误差消除算法以降低时间累积误差对车速计算的影响;误差消除算法具体包括:
[0043]
s21、根据所述障碍物参数判断是否有负速度目标的存在;如果没有则执行步骤s22;如果有则执行步骤s23;此处所述的负速度为目标相对车辆的速度,负速度目标的速度与车速刚好方向相反、大小相等的目标;比如是在当前车辆在倒车时,当前车辆后方的静止物,车辆前进时道路两侧的静止物等。
[0044]
s22、如果加速度传感器的加速度信息为0,可以判定车辆处于静止状态,此时所述加速度积分器的积分基准清零;如果加速度传感器的加速度信息不为0,则加速度积分器继续实施步骤s21。
[0045]
具体地,正常情况下,当车辆从静止到向前正常行驶时,通过加速度传感器的检测
车辆的加速度,通过对加速度信息进行积分运算获取车辆当前速度(记为车速参数);通过雷达传感器判断障碍物的运行速度(记为障碍物速度),如果判断障碍物是相对于车辆后退运行(即远离车辆的方向运行),且障碍物速度与车辆速度相当,则可判定当前障碍物为静止目标
[0046]
s23、此时将所述障碍物速度与加速度积分器的积分计算所得到的车速信息进行比较,如果两者的误差小于一个规定的误差值,则选择当前加速度积分器所得到的车速信息作为当前车辆运动车速,继续执行步骤s21;如果两者误差超过规定的误差值,则执行步骤s24;
[0047]
s24、当加速度传感器的加速度信息为0时,通过所述雷达传感器测定n次所述障碍物速度,求n次所述障碍物速度的平均值,将平均值作为当前车辆运动车速,继续执行步骤s21。
[0048]
当有探测到负速度目标时,且加速度传感器的加速度信息为0时,表明车在匀速运动(包括静止),此时负速度目标的速度(障碍物速度)与加速度传感器的加速度的时间积分(即车辆速度)进行比较,如果在允许的范围内(此范围根据实际的使用需要灵活设定),则将障碍物速度作为当前加速度积分的基准速度;通过该方式,经由加速度传感器检测的车辆速度能够实时得到校准,成功消除了时间积累的误差。
[0049]
通过该步骤2,即可判定了车辆当前的速度等信息,记为车身姿态(或雷达姿态)。
[0050]
s3、通过坐标解算单元对雷达姿态与障碍物参数的结合进行坐标解算,得到障碍物与车身的相对位置关系;
[0051]
s4、根据坐标解算结果判定障碍物是否与车身存在碰撞风险,进行雷达告警的输出。
[0052]
上述步骤s3、s4中,坐标解算的方式与雷达告警的策略按照现有技术中比较成熟的技术实际应用即可,此处不再赘述。
[0053]
本发明的方案中,毫米波雷达的处理控制单元在完成雷达信号处理(雷达信号的收发)基础上,还需要通过总线获取加速度传感器的加速度信息;通过障碍物参数与加速度信息的结合,采用精准的误差消除算法得到车速;再结合障碍物参数、车速、加速度信息,准确计算到障碍物和车身的相对位置和相对运动关系,从而制定更加精确的告警策略。
[0054]
本实施例的毫米波雷达还包括给所述处理控制单元提供合适电源的电源管理模块,所述电源管理模块的输入端连接外部电源。
[0055]
本发明将小型化加速度传感器与雷达传感器一体化设计,处理控制单元在完成雷达信号处理(获取障碍物参数)的基础上,同时通过总线获取加速度传感器所采取的车身参数,并且根据车身参数与障碍物参数共同测算,来确定车辆的工作模式和告警策略。
[0056]
加速度传感器具体体积小,功耗低,灵敏度高的特点,能够集成到毫米波雷达电路板中,从而不会过多的增加雷达传感器的体积;同时加速度传感器、雷达传感器、以及其他电子元器件一起焊接在pcb上,而使得加速度传感器与雷达传感器是一个位置相对固定的关系,从而确保了加速度传感器所获取的加速度信息时与雷达传感器获取障碍物参数时的雷达传感器的姿态完全一致,从而最大限度的降低了计算误差。
[0057]
以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,不经创造性所作的
任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1