一种基于玻璃导轨的高精度三维轮廓扫描测量平台的制作方法
[0001]
本实用新型涉及光学加工、光学测量、纳米坐标测量等领域,具体涉及一种基于玻璃导轨的高精度三维轮廓扫描测量平台,涉及光学材料加工制成的导轨在超精密测量机床的运用。
背景技术:
[0002]
当前,科技生产的发展都与测量技术是相辅相成的,前者的发展为测量技术的发展提供必备的物质条件,而测量技术水平的提高又会促进前者发展,如今测量技术已成为科技生产发展的重要技术基础。随着超精密制造技术的发展,光学元件的精度得到大幅度提升,但超精密加工尽管可以达到很高的尺寸精度,同时也对加工环境和加工稳定性有很高的要求。实际加工过程中存在诸多因素影响形状精度,如机床本身的精度、机床的振动、金刚石刀具的磨损、以及夹具的端面误差等,所以要对加工表面采取多次“成型-测量-补偿”的生产过程,最终获得满足精度要求的面形。纳米级测量是光学自由曲面加工中面形评价和修正的基础,超精密加工精度急需有效的测量方法来检验,所以超精密测量是超精密加工的重要一个环节,对于超精密加工具有重要的意义。
[0003]
现在光学自由曲面测量方法主要有波面干涉法、探针扫描法和三坐标测量法等,这些方法都不能完全满足自由曲面检测需求,限制了自由曲面在光学系统中的推广应用,如在在空间预警、高分观测领域,由于受检测精度限制,目前只应用于长波红外相机领域,需要进一步提升自由曲面元件加工检测精度,才能推广到短波红外和可见光甚至紫外光领域。
[0004]
三坐标测量机的基本测量原理是将各种几何元素的测量转化为对这些几何元素上一些点集坐标位置的测量,在测得这些点的坐标位置后,再由软件按一定的评定准则计算出这些几何元素的尺寸、形状、相对位置等等。这一原理给了三坐标测量机很大的通用性和柔性,三坐标测量机种类繁多,形式各样,主要有移动桥式、龙门式、悬臂式、水平臂式、坐标镗式、仪器台式等。三坐标测量机通常由主机、测头系统、测量系统、驱动控制系统和测量软件五大部分组成。针对这五个部分,世界各国的科研院所和生产厂商,竞相开展深入研究,不断采用新技术、新材料、新工艺,整个行业呈现出非常迅猛的发展态势。例如在采用工程陶瓷、磁力封闭新材料、新结构等方面的进展;微型测头技术的发展,多测头的集成,测量功能的扩展;控制系统的不断开放,软件技术的智能化发展;多功能、高精度、多坐标综合测量仪的出现;只需一次装卡就可完成工件多种几何参数的检测,有效提高测量精度和效率;以及对测量环境、误差分离和修正技术等问题的不断深入研究。
[0005]
轮廓测量是测量各种机械零件素线形状和截面轮廓形状的坐标数据。传统轮廓仪是2d截线测量,需要附加另一维坐标轴才能重构出三维面形。例如英国taylor hobson公司在其form talysurf系列相位光栅干涉pgi轮廓仪的基础上,集成高精度气浮转台,组成圆柱坐标测量系统pgi 3d optics,可实现测量重复性0.1μm的三维面形测量,测量口径200mm,为了实现复杂曲面轮廓的三维高精度测量,多国开发了超精密纳米三坐标测量系统
(nano-cmm),典型纳米三坐标测量系统有英国国家物理实验室(national physical lab,npl)研制的小型三维测量机;德国联邦物理技术研究所(ptb,physikalisch-technische bundesanstalt)研制的special cmm,采用传统的高精度cmm机台,新开发接触式的光纤感应及非接触式ccd感应的双探头系统,测量范围为25
×
40
×
25mm,总体测量不确定度为100nm;可以看出,这些纳米三坐标测量系统虽然测量精度高,但是测量范围小,无法满足大口径测量需求。大口径轮廓超精密扫描测量技术需要大行程超精密多轴轮廓扫描平台,难度大,只有荷兰、英国等少数精密工程技术领域发展水平高的国家开展了相关研究,并取得较好的进展,但是这些平台由于采用零阿贝误差结构设计或者利用运动结构框和测量功能框分离结构,整个装置结构复杂,有效利用工作空间小,成本高昂。
技术实现要素:
[0006]
针对上述现有技术中的不足,本实用新型提供一种基于玻璃导轨的高精度三维轮廓扫描测量平台,基于光学精度导轨能够大幅提高运动轴的精度,减小单轴导轨的直线度误差以提升系统测量精度;采用低阿贝误差结构设计测量机床,使其满足高精度的轮廓扫描测量。
[0007]
为实现上述目的,本实用新型提供一种基于玻璃导轨的高精度三维轮廓扫描测量平台,包括扫描传感器、x轴导轨直线系统、y轴导轨直线系统;
[0008]
所述x轴导轨直线系统包括x轴导轨、x轴滑块与x轴驱动,所述x轴滑块在x轴驱动的作用下滑动连接在x轴滑块上;
[0009]
所述y轴导轨直线系统包括y轴导轨、y轴滑块与y轴驱动,所述y轴滑块在y轴驱动的作用下滑动连接在y轴滑块上;
[0010]
所述扫描传感器与待测工件中的一个设在x轴滑块上,所述扫描传感器与待测工件中的另一个设在y轴滑块上,所述扫描传感器在x轴滑块和/或y轴滑块滑动的过程中扫描待测工件的轮廓;
[0011]
所述x轴导轨与y轴导轨中的至少一个由光学材料加工制成。
[0012]
作为上述技术方案的进一步改进,还包括z轴导轨直线系统;
[0013]
所述扫描传感器通过z轴导轨直线系统连接在x轴滑块或y轴滑块上,以便于调节扫描传感器与待测工件之间的间距。
[0014]
作为上述技术方案的进一步改进,所述z轴导轨直线系统包括z轴导轨与z轴滑块;
[0015]
所述z轴滑块滑动连接在z轴导轨上,所述z轴导轨固定设在x轴滑块或y轴滑块上,所述扫描传感器固定设在z轴滑块上;
[0016]
所述z轴导轨为机械导轨。
[0017]
作为上述技术方案的进一步改进,所述x轴驱动、y轴驱动均通过皮带电机传动或丝杆电机传动驱动x轴滑块、y轴滑块滑动。
[0018]
作为上述技术方案的进一步改进,所述x轴导轨直线系统、y轴导轨直线系统上均设有限位机构,以用于限制x轴滑块、y轴滑块的行程,保证运行安全。
[0019]
作为上述技术方案的进一步改进,还包括基座以及垂直设在基座上的支撑梁;
[0020]
所述x轴导轨设在基座上,所述y轴导轨设在支撑梁的顶部。
[0021]
作为上述技术方案的进一步改进,所述x轴导轨直线系统还包括x轴导轨底座,所
述y轴导轨直线系统还包括y轴导轨底座;
[0022]
所述x轴导轨通过x轴导轨底座固定设在基座上,所述y轴导轨通过y轴导轨底座固定设在支撑梁的顶部。
[0023]
作为上述技术方案的进一步改进,所述x轴导轨底座、y轴导轨底座上均设有光栅尺,以用于减小阿贝误差。
[0024]
作为上述技术方案的进一步改进,所述基座、支撑梁、x轴滑块、x轴导轨底座、y轴滑块、y轴导轨底座均采用大理石材料制成。
[0025]
本实用新型提供一种基于玻璃导轨的高精度三维轮廓扫描测量平台,通过采用光学材料加工制成x轴导轨与y轴导轨,基于光学精度导轨能够大幅提高运动轴的精度,减小单轴导轨的直线度误差以提升系统测量精度;采用低阿贝误差结构设计测量机床,使其满足高精度的轮廓扫描测量。
附图说明
[0026]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0027]
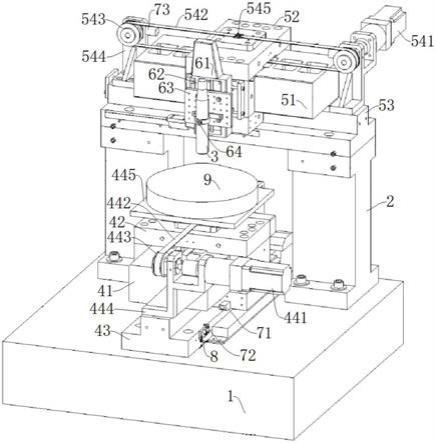
图1为本实用新型实施例中基于玻璃导轨的高精度三维轮廓扫描测量平台轴侧图。
[0028]
附图标号说明:基座1、支撑梁2、扫描传感器3、x轴导轨41、x轴滑块42、x轴导轨底座43、x轴驱动电机441、x轴驱动皮带442、x轴皮带轮443、x轴支架444、气浮滑块445、y轴导轨51、y轴滑块52、y轴导轨底座53、y轴驱动电机541、y轴驱动皮带542、y轴皮带轮543、y轴支架544、y轴压片545、z轴导轨底座61、z轴导轨62、z轴滑块63、夹具64、x轴防撞块71、x轴限位开关72、y轴防撞块73、光栅尺8、待测工件9。
[0029]
本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0030]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0031]
需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0032]
另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0033]
在本实用新型中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理
解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是物理连接或无线通信连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0034]
另外,本实用新型各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
[0035]
如图1所示为本实施例公开的一种基于玻璃导轨的高精度三维轮廓扫描测量平台,包括基座1、支撑梁2、扫描传感器3、x轴导轨直线系统、y轴导轨直线系统与z轴导轨直线系统,其中,支撑梁2垂直设在基座1上,x轴导轨直线系统设在基座1上y轴导轨直线系统设在支撑梁2的顶部。
[0036]
x轴导轨直线系统包括x轴导轨41、x轴滑块42、x轴驱动、x轴导轨底座43,x轴导轨41通过x轴导轨底座43固定设在基座1上,x轴滑块42在x轴驱动的作用下滑动连接在x轴滑块42上。其中,x轴驱动通过皮带电机传动或丝杆电机传动驱动x轴滑块42滑动,也可以采用其他直线运动驱动方式。
[0037]
本实施例中x轴驱动具体采用皮带电机传动,即x轴驱动包括x轴驱动电机441、x轴驱动皮带442与x轴皮带轮443;两个x轴皮带轮443通过x轴支架444设在x轴导轨41的两端,x轴驱动皮带442套在两个x轴皮带轮443上,其中,x轴皮带轮443还设有并未图示的x轴皮带张紧机构,以用于拉近x轴驱动皮带442,两个x轴皮带轮443中的一个作为主动轮与x轴驱动电机441的输出端相连,另一个为从动轮。x轴滑块42滑动连接在x轴导轨41上的同时与x轴驱动皮带442固定相连,其中,x轴滑动与x轴驱动皮带442之间的连接方式可以采用压接的方式,即在x轴滑块42的顶部设置压槽,在x轴驱动皮带442上的固定位置设置固定的x轴压片,通过x轴压片与压槽的配合实现x轴滑块42与x轴驱动皮带442的固定相连。当然,x轴滑块42与x轴驱动皮带442也可以采用胶接或螺栓连接等其他的固定方式。
[0038]
y轴导轨直线系统包括y轴导轨51、y轴滑块52、y轴驱动、y轴导轨底座53,y轴导轨51通过y轴导轨底座53固定设在支撑梁2上,y轴滑块52在y轴驱动的作用下滑动连接在y轴滑块52上。本实施例上,支撑梁2的数量为两个,且分别位于x轴导轨41的两侧,y轴导轨底座53的两端分别固定在两个支撑梁2的顶部。即y轴导轨51悬空架设在x轴导轨41的上方且与x轴导轨41相互垂直。
[0039]
y轴驱动通过皮带电机传动或丝杆电机传动驱动y轴滑块52滑动,也可以采用其他直线运动驱动方式。本实施例中y轴驱动具体采用皮带电机传动,即y轴驱动包括y轴驱动电机541、y轴驱动皮带542与y轴皮带轮543;两个y轴皮带轮543通过y轴支架544设在y轴导轨51的两端,y轴驱动皮带542套在两个y轴皮带轮543上,其中,y轴皮带轮543还设有并未图示的y轴皮带张紧机构,以用于拉近y轴驱动皮带542,两个y轴皮带轮543中的一个作为主动轮与y轴驱动电机541的输出端相连,另一个为从动轮。y轴滑块52滑动连接在y轴导轨51上的同时与y轴驱动皮带542固定相连,其中,y轴滑动与y轴驱动皮带542之间的连接方式可以采用压接的方式,即在y轴滑块52的顶部设置压槽,在y轴驱动皮带542上的固定位置设置固定的y轴压片,通过y轴压片与压槽的配合实现y轴滑块52与y轴驱动皮带542的固定相连。当
然,y轴滑块52与y轴驱动皮带542也可以采用胶接或螺栓连接等其他的固定方式。
[0040]
扫描传感器3与待测工件9中的一个设在x轴滑块42上,扫描传感器3与待测工件9中的另一个设在y轴滑块52上,以使得扫描传感器3在x轴滑块42和/或y轴滑块52滑动的过程中扫描待测工件9的轮廓。本实施例中,扫描传感器3位于y轴滑块52上,x轴滑块42上安装有能够安置待测工件9的气浮滑块445。具体的,扫描传感器3通过z轴导轨直线系统连接在x轴滑块42或y轴滑块52上,以便于调节x轴滑块42之间的间距。z轴导轨直线系统包括z轴导轨底座61、z轴导轨62与z轴滑块63,z轴导轨62通过z轴导轨底座61固定设在y轴滑块52上,z轴滑块63滑动连接在z轴导轨62上,扫描传感器3通过夹具64固定设在z轴滑块63上。其中,z轴导轨62为机械导轨,z轴滑块63在z轴导轨62上的驱动方式可以是机动的,也可以是手动的。本实施例中z轴滑块63在z轴导轨62上的驱动方式为手动的,工作人员根据实际需求滑动z轴滑块63,以使得扫描传感器3与待测工件9之间的距离适宜,随后通过螺栓结构将z轴滑块63固定在z轴导轨62上。需要注意的是,z轴导轨62、x轴导轨41、y轴导轨51两两之间相互垂直,且通过垂直度调整螺钉的调整实现z轴导轨62、x轴导轨41、y轴导轨51的两两垂直。
[0041]
本实施例中,扫描传感器3采用光学扫描非接触传感器,x轴导轨41与y轴导轨51均由光学材料加工制成,即x轴导轨41与y轴导轨51均为玻璃导轨,在x轴导轨41与y轴导轨51的制备过程中,先利用波面干涉仪对导轨数据进行测量,并根据所得测量结果指导x轴导轨41与y轴导轨51的加工,使x轴导轨41与y轴导轨51的面形和形位误差达到亚微米水平,从而提高测量平台的测量精度;而采用光学扫描的非接触传感器,实现工件的无损伤快速扫描测量,能大幅提升轮廓测量的精度,测量速度,测量工件口径,测量的通用性,实现运动误差高精度测量和标定,是超精密轮廓测量系统计量新方法。
[0042]
需要注意的是,本实施例中的基座1、支撑梁2、x轴滑块42、x轴导轨底座43、y轴滑块52、y轴导轨底座53以及气浮滑块445均采用大理石材料制成,通过加工将基座1、支撑梁2、x轴滑块42、x轴导轨底座43、y轴滑块52、y轴导轨底座53以及气浮滑块445的面形和形位误差均优于2微米,进而提高轮廓测量的精度。
[0043]
需要注意的是,x轴导轨直线系统、y轴导轨直线系统上均设有限位机构,以用于限制x轴滑块42、y轴滑块52的行程,保证运行安全。本实施例中,限位机构包括x轴防撞块71、x轴限位开关72、y轴防撞块73与并未图示的y轴限位开关,其中,y轴防撞块73安装y轴皮带轮543的y轴支架544上,x轴防撞块71安装在x轴滑块42底部;x轴限位开关72与x轴驱动电机441电联并安装在x轴导轨底座43的侧面的,并位于x轴滑块42的行走路径上,y轴限位开关与y轴驱动电机541电联并安装在y轴导轨底座53的侧面的,并位于y轴滑块52的行走路径上。当x轴滑块42、y轴滑块52在滑动过程中触发x轴限位开关72、y轴限位开关时将会导致x轴驱动电机441、y轴驱动电机541立即停止运行,以用于限制x轴滑块42、y轴滑块52的行程,保证运行安全。
[0044]
需要注意的是,x轴导轨底座43、y轴导轨底座53上均设有光栅尺8,以用于减小阿贝误差。
[0045]
以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1