一种基于多传感器的航空共轴遥感装置
1.本实用新型涉及一种遥感技术领域,具体涉及一种基于多传感器的航空共轴遥感装置。
背景技术:
2.航空遥感又称机载遥感,是指利用飞行平台诸如飞机、飞艇及气球等作为传感器运载工具在空中进行遥感的技术,是由航空摄影侦察发展而来的一种多功能综合性探测技术。传统的航空遥感系统是利用飞机搭载一种传感器进行对地观测,随着飞机性能的提升、传感器集成度的提高以及高效率遥感作业的需求,使用一架遥感飞机搭载多种不同类型的传感器在空中进行对地观测是现阶段航空遥感的发展趋势。其中,不同类型的传感器包括多光谱相机、高光谱成像仪、红外相机、激光雷达、合成孔径雷达(sar)等。不同类型的传感器进行对地观测的视角是不同的,有的是下视,即垂直海平面向下,如多光谱相机、高光谱成像仪、热红外相机、激光雷达等,有的是侧视,即与海平面呈一定夹角向下,如sar;在这种情况下,不同类型的传感器在同时进行对地观测时就不能满足共轴遥感,即不能满足同时针对同一块地表区域进行对地观测,导致下视传感器与侧视传感器所获取的遥感数据不一致;另外,为了保证所有传感器能够获取相同地表区域的遥感数据,遥感飞机需要通过多飞航线以弥补下视及侧视带来的差异,这样又会导致飞行航线的冗余及飞行效率的降低。
技术实现要素:
3.本实用新型的目的是提供一种基于多传感器的航空共轴遥感装置,本实用新型在飞行过程中采取特殊的飞行方法并通过工控机控制不同的设备,从而使不同类型的传感器实现共轴遥感,即在相同时空环境下实现对同一地表区域的对地观测,减少了冗余飞行,提高了航空遥感的工作效率,能够更快、更便捷地完成基于多传感器的航空遥感任务。
4.为了达到上述目的,本实用新型有如下技术方案:
5.本实用新型的一种基于多传感器的航空共轴遥感装置,包括斜飞遥感飞机,陀螺稳定平台,遥感设备,工控机,天线罩,sar天线, sar天线转台,gnss天线,gnss接收机,所述陀螺稳定平台与斜飞遥感飞机的下视遥感窗口固连;所述遥感设备与陀螺稳定平台固连;所述gnss天线与斜飞遥感飞机顶部固连;所述工控机与斜飞遥感飞机地板固连;所述天线罩与斜飞遥感飞机的机腹和机侧固连;所述 sar天线分别与斜飞遥感飞机的机侧和sar天线转台固连;所述sar 天线转台与斜飞遥感飞机的机腹固连;所述gnss接收机与工控机同连;所述gnss天线通过数据线与gnss接收机连接;所述gnss接收机通过数据线与工控机连接;所述工控机通过数据线与遥感设备连接;所述工控机通过数据线与sar天线连接;所述工控机通过数据线与陀螺稳定平台连接;
6.所述斜飞遥感飞机为能够斜飞的遥感飞机,斜飞遥感飞机的横轴与海平面平行面的夹角为:15
°‑
30
°
;所述斜飞遥感飞机包含结构安装平台、下视光学窗口、光学玻璃和照相舱门,其中,结构安装平台位于下视光学窗口上方,光学玻璃位于下视光学窗口上,照相舱
门位于光学玻璃下方;
7.所述遥感设备包括sar、多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达的传感器;其中,sar天线的入射波束随斜飞遥感飞机的倾斜而发生偏移;而多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达的传感器,在斜飞遥感飞机倾斜时,由陀螺稳定平台调整为垂直海平面向下进行对地遥感观测,形成下视对地遥感观测,而不受飞机角运动的影响;陀螺稳定平台能用于控制遥感设备的姿态;
8.其中,sar通过侧视即与地面法线呈一定夹角向下进行对地遥感观测;所述sar天线发出的入射波束与地面法线之间夹角为30
°‑
60
°
;多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达均通过下视即垂直海平面向下进行对地遥感观测;
9.其中,陀螺稳定平台安装在结构安装平台上;多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达的遥感设备均安装在陀螺稳定平台上,sar与陀螺稳定平台分离安装;
10.所述天线罩是指机载雷达天线罩,共有三个,其中机腹下方设置机腹天线罩1个,机身两侧分别设置左侧sar天线罩和右侧sar天线罩;
11.其中,三个天线罩均安装到飞机机身的前半段。其中,机腹天线罩相对于飞机对称面对称;左、右侧sar天线罩在前后方向上与机腹天线罩的有效段重叠。
12.所述sar天线转台安装在斜飞遥感飞机机腹,用于控制机腹sar 天线方位,使其能够向左或向右倾斜。
13.所述sar天线共有三个,一个安装在sar天线转台上,另外两个分别安装在斜飞遥感飞机左、右侧。其中机腹sar天线位于机腹天线罩内部,左、右侧sar天线分别位于左、右侧sar天线罩内部。
14.其中,三个sar天线可以获取p、l、c、x等四个波段的sar数据,左、右侧sar天线获取的数据相同。
15.所述gnss天线可以接收gnss信号,发送给gnss接收机,gnss 接收机处理gnss信号,然后输出gnss数据给工控机。
16.所述工控机包含控制设备和显示设备,其中,控制设备用于控制陀螺稳定平台、sar天线转台、sar、多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达等传感器;显示设备用于显示地图、飞行航线、飞机飞行轨迹和飞机位置信息等。
17.其中,所述工控机能够针对航空遥感的作业区域制作斜飞遥感飞机的飞行计划,使斜飞遥感飞机上的所有遥感设备沿指定的飞行航线进行对地遥感观测,其步骤是:
18.1)坐标转换
19.坐标变换可以使系统在航线设计中提高设计的精度和效率,因为通过坐标变换可以处理不同坐标系的数据。目前常用的坐标系包括 wgs84全球坐标系、国家2000坐标系、西安80坐标系、北京54坐标系和地方坐标系,不同的坐标系数据有时需要进行转换。由于飞行测区范围的节点一般采用的是wgs84的经纬度坐标,经纬度坐标不方便计算方位角和点线面之间的距离,而平面坐标便于计算,因此经纬度坐标与平面直角坐标之间的转换不可避免。
20.首先需要使用gps获取点的大地坐标(b
84
l
84
h
84
)
t
,然后根据 wgs84的参考椭球参数由公式(1)换算至空间直角坐标(x y z)
t
,再根据北京54或西安80或地方独立坐标系的
参考椭球参数由公式(2) 将(x y z)
t
换算至大地坐标形式(b
54 l
54 h
54
)
t
或(b
80 l
80 h
80
)
t
或 (b
local l
local h
local
)
t
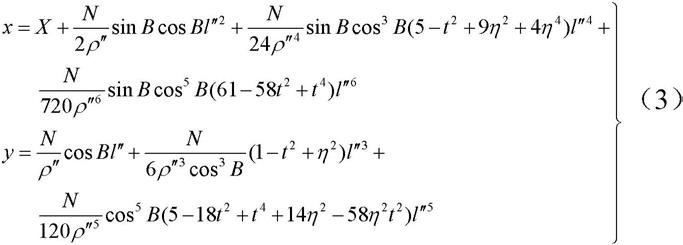
,最后再根据中央子午线、投影面高程及北向东向偏移量由公式(3)将(b
54 l
54
)
t
或(b
80
l
80
)
t
或(b
local l
local
)
t
投影为高斯坐标 (x
g y
g
)
t
;
[0021][0022][0023][0024]
其中,
[0025]
x=c0b+(c2cosb+c4cos3b+c6cos5b+c8cos7b)sin b
ꢀꢀ
(4)
[0026][0027]
t=tan b
ꢀꢀ
(6)
[0028][0029]
l
″
=l
‑
l0ꢀꢀ
(8)
[0030]
式中,l、b为转换前的经纬度坐标;h是高程
[0031]
x、y为转换后的高斯坐标;
[0032]
a为椭球长半径,e为椭球的第一偏心率;
[0033]
l0为投影带的中央子午线经度;
[0034]
c0、c2、c4、c6、c8为只与椭球参数有关的常数值;
[0035]
在飞行航线设计中使用坐标变换,相对于常规的手工航线设计,能提高航带设计的效率;虽然目前手工计算相对完善、稳定,但如果航片的数量过多将带来较大的计算强度,同时手工航带计算无法利用精度较高的电子地图,因此利用坐标变换的航线设计具有明显的优势,使测区的范围更加明确;坐标变换的应用提高了航带设计的精度和效率,也提高了系统处理各种坐标系数据的能力。
[0036]
2)航线自动判断
[0037]
在基于多传感器的航空遥感飞行管理系统中引入地理信息系统中的缓冲区分析可以简化计算量,并可在一定程度上提升空中飞行品质。缓冲区是建立在点、线、面等实体周围具有一定宽度范围的多边形,基于多传感器的航空遥感飞行管理系统能够根据飞行任
务生成特定形状的判断缓冲区。当系统自动拍摄某个预定的区域时,需要判断飞机和测区及飞行航线之间的相对位置,但由于实际情况的复杂性 (飞行员会根据气流状态调整到合适的角度进行平飞),对飞机的相对位置的正确判断需要很多判断条件,实时计算所需要的计算量比较大。为了保证系统的顺利运行,系统需要提前生成一些缓冲区来判断相对位置,这样只需要判断斜飞遥感飞机是否在缓冲区内就能够确定斜飞遥感飞机和航线的相对位置,从而大大减少了计算量。当斜飞遥感飞机进入缓冲区,同时满足飞行航高限制条件进入航线时,就能认为这是有效进入;当斜飞遥感飞机在进入航线后进行拍摄时,如果飞离了预定航线,超出了航带缓冲区,系统会给出提示,同时相应地自动停止航空传感器的拍摄,从而避免不符合航线设计的飞行浪费。因此,在一定程度上建立一个缓冲区,可以确保飞行路线的质量。
[0038]
目前,随着gnss设备精度的提高,可以通过gnss设备的反馈信息来确定飞机与预定航线的相对位置,从而进行自动判断并及时对航空传感器执行相关操作。
[0039]
3)航线位置计算
[0040]
首先根据航线布设方向旋转坐标系,使旋转后坐标系的x
′
轴平行于航线方向;因此计算航线的位置,只需要求出测区的航向中心线和航线条数,然后其它航线平行于测区的航向中心线往两边对称敷设即可;航向中心线的纵坐标是:
[0041]
y
′
=(y
′
max
+y
′
min
)/2
ꢀꢀ
(9)
[0042]
式中,y
′
max
、y
′
min
分别为x
′ꢀ
y
′
坐标系下的多边形外接矩形纵坐标的最大值和最小值;
[0043]
根据国家标准地形图航空摄影测量内业规范的要求,旁向覆盖超出摄区边界线一般不少于像幅的50%,最少不少于像幅的30%;设l
y
为像幅在地面的旁向覆盖宽度,则设计的最小总覆盖宽度为:
[0044]
w
min
=y
′
max
‑
y
′
min
+2l
y
ꢀꢀ
(10)
[0045]
设测区内航线条数为n,则所有航线总覆盖宽度为:
[0046]
w=((1
‑
s)(n
‑
1)+1)
×
l
y
ꢀꢀ
(11)
[0047]
式中s为旁向重叠率;由公式(11)能求出n=1+(w
‑
l
y
)/(l
y
‑
sl
y
); n须为整数,且保证覆盖宽度,将n取整加1,即
[0048]
n=[1+(w
‑
l
y
)/(l
y
‑
sl
y
)]+1
ꢀꢀ
(12)
[0049]
上式中括号表示取整,令w=w
min
代入,即算出满足要求的航线总条数;
[0050]
不论n为奇数还是偶数,所有航线都平行于中心线向两边对称分布,结合示意图,根据摄影测量相关知识可以推导出每条航线的纵坐标的计算公式:
[0051]
y
′
m
=(y
′
max
+y
′
min
)/2+(m
‑
(n+1)/2)(1
‑
s)
×
l
y
ꢀꢀ
(13)
[0052]
式中,m为航线至下而上的编号,1≤m≤n;
[0053]
4)曝光点坐标计算
[0054]
对于平坦地区,航空摄影测量区域的基线长度基本不变;取测区多边形x
′
方向的中心点坐标x
′0=(x
′
max
+x
′
min
)/2,其中,x
′
max
和x
′
min
为 x
′ꢀ
y
′
坐标系下多边形外接矩形横坐标的最大和最小值;
[0055]
计算某航线上曝光点的坐标,能先计算该航线与测区多边形的交点,然后以中心点(x
′0,y
′
m
)为起始点,在交点横坐标最大与最小值区间内,向左向右分别延伸摄影基线的
整数倍,得到一系列交点,即为曝光点;
[0056]
x
′
k
=x
′0±
b
k
×
k(k=0,1,2
…
)
ꢀꢀ
(14)
[0057]
式中b
k
为基线长;
[0058]
若航线与多边形没有交点或只有一个交点,即航线布设在测区多边形的外边,或者交于多边形顶部或底部的一个节点,此时,以中心点(x
′0,y
′
m
)为起始点,在(x
′
min x
′
max
)区间内向左向右分别延伸摄影基线的整数倍,能得到一系列点,依次取这些点为曝光中心,计算像片在地面上的覆盖区域,如果该区域与测区多边形有重叠,则该点作为曝光点;
[0059]
同时应考虑航空摄影规范要求,航向覆盖应超出摄区边界线一定范围,多出两个基线长,因此在边界外,应增加相应个数的曝光点;
[0060]
5)基于dem的航线设计
[0061]
基于dem的航线设计就是将dem与gis相结合,充分考虑地形因素在航空摄影航线设计中的重要作用,以dem数据为基础,以gis为技术支撑,借助栅格、矢量图作为可视化背景,通过数学运算和条件判断,解决目前实际设计中测区分区划分、参数计算和航线敷设等存在的问题,实现高精度、高质量的航空摄影航线设计;
[0062]
根据航空摄影测量规范,相邻航摄像片之间需要有一定的重叠,以覆盖测区并方便以后立体测图;重叠率分航向重叠率和旁向重叠率,公式如下:
[0063][0064]
式中,p、q分别是航向、旁向重叠率,x、y分别是航向、旁向相邻像片的重叠部分,l
x
、l
y
分别是像幅长、宽;
[0065]
地形起伏将直接影响航向及旁向重叠率,其影响可通过式(15) 分析得知;此外,地形起伏还将引起摄影基线及摄影间隔等一系列变化;
[0066][0067]
式中h为相对于平均高程基准面的高差,h
摄
为航摄相对航高,p、q为实际航向、旁向重叠率,p
′
、q
′
为计划的航向、旁向重叠率, dem能最有效地反映地形起伏,可以十分快捷地获取所需点的h值并提供计算机快速运算;
[0068]
飞行航线及像主点的高程值可以通过计算机从数字高程模型中获取,根据式(16),就可以计算出航向旁向重叠率的变化量,然后就可以计算相邻像主点位置及相邻航线的位置;
[0069]
对于地形起伏的区域,需要考虑dem的影响,首先根据像片的计划航向重叠率推算像片在平均面上的实际重叠率并计算摄影基线长b,然后根据像主点的位置及航向重叠率推算下一个像主点位置 o
i
;同理,根据旁向重叠率计算摄影航线间隔d,最后根据按摄影航线的间隔d以及b求得其他各航线上各像主点的位置o
j
;
[0070][0071][0072]
式中:b
x
、b
x
为像片上和实地上的摄影基线长度;
[0073]
d
x
、d
y
为像片上和实地上的航线间隔宽度;
[0074]
l
x
、l
y
为摄影像幅的长度和宽度;
[0075]
p
x
、q
y
为航向和旁向重叠率;
[0076]
m
航
为航摄比例尺分母。
[0077]
其中,所述sar的观测方式是侧视进行对地遥感观测,其天线的入射波束与地面法线之间夹角的范围设置为30
°‑
60
°
,其中,左侧sar 天线入射波束的采样角度范围是
‑
30
°‑‑
60
°
,右侧sar天线入射波束的采样角度范围设置为30
°‑
60
°
;而陀螺稳定平台上的多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达遥感设备的观测方式是下视,其传感器头入射波束与地面法线之间夹角的范围设置成
ꢀ‑
30
°‑
30
°
,入射波束的采样角度范围是
‑
30
°‑
30
°
;由此可见,侧视遥感设备与下视遥感设备在相同条件下的对地观测范围是不一样的,为了确保sar和其他遥感设备的对地观测范围一致,采取以下方法步骤:
[0078]
1)在工控机里打开陀螺稳定平台控制软件,点击“通讯设置”,设置角度参数,其中,横滚角的范围设为:
‑
30
°‑
+30
°
;俯仰角的范围设为:
‑8°‑
+6
°
;旋偏角的范围设为:
‑
30
°‑
+30
°
;
[0079]
2)根据任务计划设定情况在50%
‑
75%中确定旁向重叠率,按此要求制作飞行计划,生成飞行航线;按照此要求在工控机中显示地图、飞行航线、飞机飞行轨迹和飞机位置信息;
[0080]
3)当飞机飞行的第一条航线1位于作业区域的最西边或最南边时,通知飞行员将斜飞遥感飞机绕飞机纵轴向左下倾斜15
°‑
30
°
,形成左下倾斜15
°‑
30
°
倾角的斜飞遥感飞机,并保持此状态沿第一条航线1 飞行,此时陀螺稳定平台会自动修正横滚角,使陀螺稳定平台上的遥感设备保持下视对地观测状态;
[0081]
4)在工控机里打开sar天线转台控制软件,设置转台向左下倾斜,设置转台上sar天线入射波束的采样角度范围为
‑
30
°‑‑
60
°
;此时,机腹sar天线和左侧sar天线入射波束的采样角度范围均为
ꢀ‑
30
°‑0°
:
[0082]
5)当工控机上显示的斜飞遥感飞机进入飞行航线时,开启所有遥感设备,斜飞遥感飞机保持该状态飞出该航线时,关闭所有遥感设备,恢复斜飞遥感飞机平行飞行;
[0083]
6)斜飞遥感飞机转弯,准备飞第二条航线5,通知飞行员将斜飞遥感飞机绕飞机纵轴向右下倾斜30
°
,形成右下倾斜15
°‑
30
°
倾角的斜飞遥感飞机,并保持此状态沿第二条航线5飞行,此时陀螺稳定平台会自动修正横滚角,使陀螺稳定平台上的遥感设备保持下视对地观测状态;
[0084]
7)在工控机里打开sar天线转台控制软件,设置转台向右下倾斜,设置转台上sar天线入射波束的采样角度范围为30
°‑
60
°
。此时,机腹sar天线和右侧sar天线入射波束的采样角度范围均为0
°‑
30
°
;
[0085]
8)当工控机上显示的飞机进入飞行航线时,开启所有遥感设备,斜飞遥感飞机保持该状态飞出该航线时,关闭所有遥感设备,恢复斜飞遥感飞机平行飞行;
[0086]
9)重复步骤3)
‑
步骤8),直到将作业区域所有的航线飞完,结束飞行任务;
[0087]
10)当飞机飞的第一条航线1位于作业区域的最东边或最北边时,通知飞行员将斜飞遥感飞机绕飞机纵轴向右下倾斜15
°‑
30
°
,形成右下倾斜15
°‑
30
°
倾角的斜飞遥感飞机,并保持此状态沿第一条航线1飞行,此时陀螺稳定平台会自动修正横滚角,使陀螺稳定平台上的遥感设备保持下视对地观测状态;
[0088]
11)在工控机里打开sar天线转台控制软件,设置转台向右下倾斜,设置转台上sar天线入射波束的采样角度范围为30
°‑
60
°
;此时,机腹sar天线和右侧sar天线入射波束的采样角度范围均为0
°‑
30
°
;
[0089]
12)当工控机上显示的飞机进入飞行航线时,开启所有遥感设备,斜飞遥感飞机保持该状态飞出该航线时,关闭所有遥感设备,恢复斜飞遥感飞机平行飞行;
[0090]
13)斜飞遥感飞机转弯,准备飞第二条航线5,通知飞行员将斜飞遥感飞机绕飞机纵轴向左下倾斜30
°
,形成左下倾斜15
°‑
30
°
倾角的斜飞遥感飞机,并保持此状态沿第二条航线5飞行,此时陀螺稳定平台会自动修正横滚角,使陀螺稳平台上的遥感设备保持下视对地观测状态;
[0091]
14)在工控机里打开sar天线转台控制软件,设置转台向左下倾斜,设置转台上sar天线入射波束的采样角度范围为
‑
30
°‑‑
60
°
。此时,机腹sar天线和左侧sar天线入射波束的采样角度范围均为
ꢀ‑
30
°‑0°
;
[0092]
15)当工控机上显示的飞机进入飞行航线时,开启所有遥感设备,斜飞遥感飞机保持该状态飞出该航线时,关闭所有遥感设备,恢复斜飞遥感飞机平行飞行;
[0093]
16)重复步骤10)
‑
步骤15),直到将作业区域所有的航线飞完,结束飞行任务。
[0094]
其中,所述sar天线的入射波束与地面法线之间夹角的范围也能设置成其他范围,不局限于30
°‑
60
°
,也可以是20
°‑
50
°
或25
°‑
55
°
等,范围区间长度小于40
°
;侧视的遥感设备也不局限于sar一种,其他侧视遥感设备如倾斜摄影航空相机也适用。
[0095]
其中,所述遥感设备sar的距离分辨率是:
[0096][0097]
其中,τ是sar的脉冲宽度,c是光速,θ是sar天线入射波束侧视角;
[0098]
由于斜飞遥感飞机倾斜飞行,θ由
±
45
°
变成了
±
15
°
,这将导致δr 变大,即距离分辨率降低;为了保证距离分辨率不降低,利用线性调频调制脉冲宽度和振幅,减小τ,从而确保距离分辨率不会降低,其方法步骤是:
[0099]
将谐波经线性频率调制,产生一个线性调频脉冲后发射脉冲,接收回波后,使脉冲通过在频率及时间关系上与发射时具有相反频率特性的匹配滤波器,先使接收的低频率回波在滤波器的延迟大于高频率回波的延迟,从而把接收的脉冲信号以缩小脉冲宽度和增大脉冲幅度的形式提取出来;
[0100]
在脉冲宽度内,瞬时频率线性地由f
min
变化到f
max
,调频带宽δf=f
max
‑
f
min
;回波经过匹配滤波器生成的波形函数的包络(包络是由许多椭圆形曲线交织而成的一种图形,外观看起来是包起来的一样。包络在数学、信号处理、文学、经济学、传统中医学上都有自己独
特的含义)是sin cδf,其波形主瓣大于旁瓣,半功率宽度是即压缩后的脉冲宽度τ0,因此脉冲宽度被压缩为原来的且δf越大,被压缩的脉冲宽度越小,δr越小,距离分辨率越高;
[0101]
其中,f
min
是最小瞬时频率,f
max
是最大瞬时频率;sin c是辛格函数,
[0102]
其中,当上述步骤4)中的左侧sar天线入射波束的采样角度范围是
‑
30
°‑0°
时,相应的右侧sar天线入射波束的采样角度范围则变为60
°‑
90
°
,右侧sar天线入射波束侧视角是75
°
;根据三角函数原理,当采样角度由30
°
变为60
°
时,对应的地面覆盖范围由h tan 30
°
变成 h tan 60
°
;
[0103]
其中,h是飞机相对航高,tan 90
°
=∞,能算得地面覆盖范围是原来的3倍;如果采样角度
‑
30
°‑
30
°
对应的覆盖范围是飞行计划中的第n条航线30,那么采样角度60
°‑
90
°
对应的覆盖范围是飞行计划中的第(3+n)
‑
第n条航线30,相当于提前获取了这几条航线对应的数据;同时,右侧sar天线入射波束侧视角由45
°
变成75
°
,侧视角增大,根据上述公式(19),第(3+n)
‑
第n条航线30 对应遥感数据的距离分辨率δr变小,即距离分辨率提高。(根据之前步骤,sar数据相对于其他遥感设备少获取半条线,这样既可以弥补少的线,还可以比其它遥感设备多飞一些范围,并确保了距离分辨率)。同理,步骤7)、步骤11)和步骤14)都具备步骤4)的特征。
[0104]
根据之前的方法,如果只考虑飞机向下倾斜这一侧的sar天线,斜飞遥感飞机飞第一条航线1时,sar获取的是sar天线的入射波束与地面法线之间夹角
‑
30
°‑0°
对应的地面数据,其他遥感设备获取的是其他遥感设备的传感头纵轴与地面法线之间夹角
‑
30
°‑
+30
°
对应的地面数据,sar比其他遥感设备少获取0
°‑
30
°
对应的地面数据,即半条航线的数据;由于航线之间的旁向重叠率是50%
‑
75%,飞机飞第二条航线5时,sar获取的是0
°‑
30
°
对应的地面数据,且该数据与上一条航线sar获取数据的重叠率在0%
‑
25%之间;其他遥感设备获取的还是其他遥感设备的传感头纵轴与地面法线之间夹角
‑
30
°‑
+30
°
对应的地面数据,且该数据与上一条航线其他遥感设备获取数据的重叠率在50%
‑
75%之间,sar比其他遥感设备还是要少获取半条航线的数据;于是,当所有航线飞完后,sar始终比其他遥感设备要少获取半条航线的数据。现在有了向上倾斜这一侧的sar天线获取的数据,就可以提前弥补这缺失的半条航线的数据;由于倾斜飞行导致左侧或右侧sar天线侧视角增大,获取的数据会远多于半条航线,且根据公式 (19),距离分辨率比原来更高了;其他遥感设备指多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达,但不限于这些设备。
[0105]
由于采取了以上技术方案,本实用新型的优点在于:
[0106]
1、实现一机多用,通过一次飞行,就可以获取多种遥感数据,取代传统航空遥感一机一用的行业模式;
[0107]
2、实现时空一致性背景下的共轴遥感,避免冗余飞行,减少飞行航线的同时,减少了飞机飞行时间、耗油量,减轻了空中作业强度、后期数据处理的难度,节省了成本及时间;
[0108]
3、提升了航空遥感工业的技术水平。
附图说明
[0109]
图1为本实用新型的飞行示意图;
[0110]
图2为本实用新型第一至第三条航线9飞行后形成的sar和其他遥感设备对地观测重叠部分的示意图;
[0111]
图3为本实用新型的设备连接示意图;
[0112]
图4为本实用新型的sar侧视和其他遥感设备下视,斜飞遥感飞机平行飞行对地观测角度示意图;
[0113]
图5为本实用新型的sar侧视和其他遥感设备下视,斜飞遥感飞机向左下倾斜飞行对地观测角度示意图;
[0114]
图6为本实用新型的雷达罩安装示意图;
[0115]
图7为图6的a
‑
a向的示意图。
[0116]
图中:
[0117]
1、第一条航线;2、第一条航线sar与其他遥感设备对地观测重叠区域;3、第一条航线其他遥感设备对地观测区域;4、第一条航线斜飞遥感飞机;5、第二条航线;6、第二条航线sar与其他遥感设备对地观测重叠区域;7、第二条航线其他遥感设备对地观测区域;8、第二条航线斜飞遥感飞机;9、第三条航线;10、第三条航线sar与其他遥感设备对地观测重叠区域;11、第三条航线斜飞遥感飞机;12、第三条航线其他遥感设备对地观测区域;13、斜飞遥感飞机;14、显示器;15、工控机;16、机腹天线;17、左侧sar天线罩;18、右侧 sar天线罩;19、20、21:遥感设备;22、左侧视sar对地观测区域; 25、右侧视sar对地观测区域;26、sar与遥感设备对地观测重叠区域;27、右侧sar对地观侧区域;28、遥感设备对地观测区域;29、无数据区域;30、第n条航线;31、第n+1条航线;32、第n+2条航线; 33、第n+3条航线;36、左侧天线;37、左侧天线安装板;38、机腹天线罩;39、机腹天线安装板;40、sar天线转台;41、机腹天线; 43、右侧天线安装板;44、右侧天线;45、卡扣;46、固定杆;47、角度标识;48、轴承。
具体实施方式
[0118]
以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
[0119]
参见附图1
‑
图7,一种基于多传感器的航空共轴遥感装置,包括遥感飞机13,陀螺稳定平台,遥感设备19,工控机15,天线罩17、18 和38,sar天线,gnss天线,gnss接收机。所述陀螺稳定平台与斜飞遥感飞机13的下视遥感窗口固连;所述遥感设备19与陀螺稳定平台固连;所述gnss天线与斜飞遥感飞机13顶部固连;所述工控机15与斜飞遥感飞机13地板固连;所述天线罩17、18和38与斜飞遥感飞机13 固连;所述sar天线与斜飞遥感飞机13固连;所述sar天线转台40与斜飞遥感飞机13固连;所述gnss接收机与工控机15固连;所述gnss 天线通过数据线与gnss接收机连接;所述gnss接收机通过数据线与工控机15连接;所述工控机15通过数据线与遥感设备19连接;所述工控机15通过数据线与sar天线连接;所述工控机15通过数据线与陀螺稳定平台连接。
[0120]
其中,所述斜飞遥感飞机13包含结构安装平台、下视光学窗口、光学玻璃和照相舱门。其中,结构安装平台位于下视光学窗口上方,光学玻璃位于下视光学窗口上,照相舱门
位于光学玻璃下方。
[0121]
其中,所述陀螺稳定平台能够使遥感设备19垂直海平面向下进行对地遥感观测,而不受飞机角运动的影响;陀螺稳定平台能用于控制遥感设备19的姿态;
[0122]
其中,所述遥感设备19包括sar、多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达等传感器。
[0123]
其中,sar通过侧视即与地面法线呈一定夹角向下进行对地遥感观测;多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达均通过下视即垂直海平面向下进行对地遥感观测。
[0124]
其中,陀螺稳定平台安装在结构安装平台上;多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达等遥感设备19均安装在陀螺稳定平台上,sar跟陀螺稳定平台没有关联。
[0125]
其中,所述天线罩是指机载雷达天线罩,包括左侧sar天线罩17、右侧sar天线罩18、机腹天线罩38,其中机腹下方设置机腹天线罩38,机身两侧分别设置左侧sar天线罩17和右侧sar天线罩18。
[0126]
所述sar天线包括斜飞遥感飞机13机腹的sar天线、斜飞遥感飞机左、右侧的sar天线;
[0127]
所述斜飞遥感飞机13机腹的sar天线包括机腹天线16、sar天线转台40、机腹天线安装板39、机腹天线罩38,所述机腹天线安装板39 安装在所述斜飞遥感飞机13机腹上,所述sar天线转台40安装在所述机腹天线安装板39上,所述机腹天线41安装在所述sar天线转台40 上,所述机腹天线罩38安装在所述斜飞遥感飞机13机腹上,且将所述机腹天线16包裹在所述机腹天线罩38内,所述sar天线转台40用于控制所述机腹天线16方位,使其能够向左或向右倾斜;
[0128]
斜飞遥感飞机左、右侧的sar天线对称安装在斜飞遥感飞机13 机腹左、右侧,左侧sar天线包括左侧天线36、左侧天线安装板37,左侧sar天线罩17,所述左侧天线安装板37安装在所述斜飞遥感飞机 13机腹上,所述左侧天线36安装在所述左侧天线安装板37上,所述左侧sar天线罩17安装在所述斜飞遥感飞机13机腹的左侧处,且将左侧天线36包裹在左侧sar天线罩17内,右侧sar天线包括右侧天线44、右侧天线安装板43,右侧sar天线罩18,所述右侧天线44安装板安装在所述斜飞遥感飞机13机腹上,所述右侧天线44安装在所述右侧天线安装板43上,所述右侧sar天线罩18安装在所述斜飞遥感飞机13机腹的右侧处,且将右侧天线44包裹在右侧sar天线罩18内;
[0129]
其中,所述sar天线转台40包括转台柱、轴承48、固定杆46、卡扣45、角度标识47,所述转台柱通过所述轴承48与所述机腹天线安装板39连接,所述机腹天线16装在所述转台柱上能够旋转,所述转台柱上表面设有所述角度标识47,所述固定杆46一端固定在所述转台柱上表面,所述固定杆46另一端能与所述机腹天线安装板39上的卡扣45 固定,使所述机腹天线16通过所述转台柱上表面上的所述角度标识47 设定了对地观测角度后进行固定。
[0130]
其中,左侧sar天线罩17、右侧sar天线罩18、机腹天线罩38均安装到飞机机身的前半段。其中,机腹天线罩38相对于飞机对称面对称;左侧sar天线罩17、右侧sar天线罩18在前后方向上与机腹天线罩38的有效段重叠。
[0131]
其中,所述sar天线转台40安装在斜飞遥感飞机13机腹,用于控制机腹sar天线方
位,使其能够向左或向右倾斜。
[0132]
其中,所述sar天线共有三个,一个安装在sar天线转台40上,另外两个分别安装在斜飞遥感飞机13左、右侧。其中机腹sar天线位于机腹天线罩38内部,左、右侧sar天线分别位于左侧sar天线罩17、右侧sar天线罩18内部。
[0133]
其中,三个sar天线可以获取p、l、c、x等四个波段的sar数据,左、右侧sar天线获取的数据相同。
[0134]
其中,所述gnss天线可以接收gnss信号,发送给gnss接收机, gnss接收机处理gnss信号,然后输出gnss数据给工控机15。
[0135]
其中,所述工控机15包含控制设备和显示设备,其中,控制设备用于控制陀螺稳定平台、sar天线转台40、sar、多光谱航空相机、高光谱航空相机、红外航空相机和机载激光雷达等传感器;显示设备用于显示地图、飞行航线、飞机飞行轨迹和飞机位置信息等。
[0136]
其中,所述工控机15可以针对航空遥感的作业区域制作飞行计划,使所有遥感设备19沿指定的飞行航线进行对地遥感观测,其方法是:
[0137]
1)坐标转换
[0138]
坐标变换可以使系统在航线设计中提高设计的精度和效率,因为通过坐标变换可以处理不同坐标系的数据。目前常用的坐标系包括 wgs84全球坐标系、国家2000坐标系、西安80坐标系、北京54坐标系和地方坐标系,不同的坐标系数据有时需要进行转换。由于飞行测区范围的节点一般采用的是wgs84的经纬度坐标,经纬度坐标不方便计算方位角和点线面之间的距离,而平面坐标便于计算,因此经纬度坐标与平面直角坐标之间的转换不可避免。
[0139]
首先需要使用gps获取点的大地坐标(b
84 l
84 h
84
)
t
,然后根据 wgs84的参考椭球参数由公式(1)换算至空间直角坐标(x y z)
t
,再根据北京54或西安80或地方独立坐标系的参考椭球参数由公式 (2)将(x y z)
t
换算至大地坐标形式(b
54 l
54 h
54
)
t
或(b
80 l
80 h
80
)
t
或 (b
local l
local h
local
)
t
,最后再根据中央子午线、投影面高程及北向东向偏移量由公式(3)将(b
54 l
54
)
t
或(b
80 l
80
)
t
或(b
local l
local
)
t
投影为高斯坐标 (x
g y
g
)
t
。
[0140][0141][0142]
[0143]
其中,
[0144]
x=c0b+(c2cosb+c4cos3b+c6cos5b+c8cos7b)sin b
ꢀꢀ
(4)
[0145][0146]
t=tan b
ꢀꢀ
(6)
[0147][0148]
l
″
=l
‑
l0ꢀꢀ
(8)
[0149]
式中,l、b为转换前的经纬度坐标;
[0150]
x、y为转换后的高斯坐标;
[0151]
a为椭球长半径,e为椭球的第一偏心率;
[0152]
l0为投影带的中央子午线经度;
[0153]
c0、c2、c4、c6、c8为只与椭球参数有关的常数值。
[0154]
在飞行航线设计中使用坐标变换,相对于常规的手工航线设计,可以提高航带设计的效率。虽然目前手工计算相对完善、稳定,但如果航片的数量过多将带来较大的计算强度,同时手工航带计算无法利用精度较高的电子地图,因此利用坐标变换的航线设计具有明显的优势,使测区的范围更加明确。坐标变换的应用提高了航带设计的精度和效率,也提高了系统处理各种坐标系数据的能力。
[0155]
2)航线自动判断
[0156]
在基于多传感器的航空遥感飞行管理系统中引入地理信息系统中的缓冲区分析可以简化计算量,并可在一定程度上提升空中飞行品质。缓冲区是建立在点、线、面等实体周围具有一定宽度范围的多边形,基于多传感器的航空遥感飞行管理系统能够根据飞行任务生成特定形状的判断缓冲区。当系统自动拍摄某个预定的区域时,需要判断飞机和测区及飞行航线之间的相对位置,但由于实际情况的复杂性 (飞行员会根据气流状态调整到合适的角度进行平飞),对飞机的相对位置的正确判断需要很多判断条件,实时计算所需要的计算量比较大。为了保证系统的顺利运行,系统需要提前生成一些缓冲区来判断相对位置,这样只需要判断飞机是否在缓冲区内就能够确定飞机和航线的相对位置,从而大大减少了计算量。当航摄飞机进入缓冲区,同时满足飞行航高限制条件进入航线时,就可以认为这是有效进入。当飞机在进入航线后进行拍摄时,如果飞离了预定航线,超出了航带缓冲区,系统会给出提示,同时相应地自动停止航空传感器的拍摄,从而避免不符合航线设计的飞行浪费。因此,在一定程度上建立一个缓冲区,可以确保飞行路线的质量。
[0157]
目前,随着gnss设备精度的提高,可以通过gnss设备的反馈信息来确定飞机与预定航线的相对位置,从而进行自动判断并及时对航空传感器执行相关操作。
[0158]
3)航线位置计算
[0159]
首先根据航线布设方向旋转坐标系,使旋转后坐标系的x
′
轴平行于航线方向;因此计算航线的位置,只需要求出测区的航向中心线和航线条数,然后其它航线平行于测区的航向中心线往两边对称敷设即可。航向中心线的纵坐标是:
[0160]
y
′
=(y
′
max
+y
′
min
)/2
ꢀꢀ
(9)
[0161]
式中,y
′
max
、y
′
min
分别为x
′ꢀ
y
′
坐标系下的多边形外接矩形纵坐标的最大值和最小
值。
[0162]
根据国家标准地形图航空摄影测量内业规范的要求,旁向覆盖超出摄区边界线一般不少于像幅的50%,最少不少于像幅的30%。设l
y
为像幅在地面的旁向覆盖宽度,则设计的最小总覆盖宽度为:
[0163]
w
min
=y
′
max
‑
y
′
min
+2l
y
ꢀꢀ
(10)
[0164]
设测区内航线条数为n,则所有航线总覆盖宽度为:
[0165]
w=((1
‑
s)(n
‑
1)+1)
×
l
y
ꢀꢀ
(11)
[0166]
式中s为旁向重叠率。由公式(11)可求出n=1+(w
‑
l
y
)/(l
y
‑
sl
y
)。 n须为整数,且保证覆盖宽度,将n取整加1,即
[0167]
n=[1+(w
‑
l
y
)/(l
y
‑
sl
y
)]+1
ꢀꢀ
(12)
[0168]
(上式中括号表示取整),令w=w
min
代入,即算出满足要求的航线总条数。
[0169]
不论n为奇数还是偶数,所有航线都平行于中心线向两边对称分布,结合示意图,根据摄影测量相关知识可以推导出每条航线的纵坐标的计算公式:
[0170]
y
′
m
=(y
′
max
+y
′
min
)/2+(m
‑
(n+1)/2)(1
‑
s)
×
l
y
ꢀꢀ
(13)
[0171]
式中,m为航线至下而上的编号,1≤m≤n。
[0172]
4)曝光点坐标计算
[0173]
对于平坦地区,航空摄影测量区域的基线长度基本不变。取测区多边形x
′
方向的中心点坐标x
′0=(x
′
max
+x
′
min
)/2,其中,x
′
max
和x
′
min
为x
′ꢀ
y
′
坐标系下多边形外接矩形横坐标的最大和最小值。
[0174]
计算某航线上曝光点的坐标,可以先计算该航线与测区多边形的交点,然后以中心点(x
′0,y
′
m
)为起始点,在交点横坐标最大最小值区间内,向左向右分别延伸摄影基线的整数倍,得到一系列交点,即为曝光点。
[0175]
x
′
k
=x
′0±
b
k
×
k(k=0,1,2
…
)
ꢀꢀ
(14)
[0176]
式中b
k
为基线长。
[0177]
若航线与多边形没有交点或只有一个交点,即航线布设在测区多边形的外边,或者交于多边形顶部或底部的一个节点,此时,以中心点(x
′0,y
′
m
)为起始点,在(x
′
min
x
′
max
)区间内向左向右分别延伸摄影基线的整数倍,可得到一系列点,依次取这些点为曝光中心,计算像片在地面上的覆盖区域,如果该区域与测区多边形有重叠,则该点作为曝光点。
[0178]
同时应考虑航空摄影规范要求,航向覆盖应超出摄区边界线一定范围,如多出两个基线长,因此在边界外,应增加相应个数的曝光点。
[0179]
5)基于dem的航线设计
[0180]
基于dem的航线设计就是将dem与gis相结合,充分考虑地形因素在航空摄影航线设计中的重要作用,以dem数据为基础,以gis为技术支撑,借助栅格、矢量图作为可视化背景,通过数学运算和条件判断,解决目前实际设计中测区分区划分、参数计算和航线敷设等存在的问题,实现高精度、高质量的航空摄影航线设计。
[0181]
根据航空摄影测量规范,相邻航摄像片之间需要有一定的重叠,以覆盖测区并方便以后立体测图。重叠率分航向重叠率和旁向重叠率,公式如下:
[0182][0183]
式中,p、q分别是航向、旁向重叠率,x、y分别是航向、旁向相邻像片的重叠部分,l
x
、l
y
分别是像幅长、宽。
[0184]
地形起伏将直接影响航向及旁向重叠率,其影响可通过式(15) 分析得知。此外,地形起伏还将引起摄影基线及摄影间隔等一系列变化。
[0185][0186]
式中h为相对于平均高程基准面的高差,h
摄
为航摄相对航高,p、 q为实际航向、旁向重叠率,p
′
、q
′
为计划的航向、旁向重叠率,dem能最有效地反映地形起伏,可以十分快捷地获取所需点的h值并提供计算机快速运算。
[0187]
飞行航线及像主点的高程值可以通过计算机从数字高程模型中获取,根据式(16),就可以计算出航向旁向重叠率的变化量,然后就可以计算相邻像主点位置及相邻航线的位置。
[0188]
对于地形起伏的区域,需要考虑dem的影响,首先根据像片的计划航向重叠率推算像片在平均面上的实际重叠率并计算摄影基线长b,然后根据像主点的位置及航向重叠率推算下一个像主点位置 o
i
;同理,根据旁向重叠率计算摄影航线间隔d,最后根据按摄影航线的间隔d以及b求得其他各航线上各像主点的位置o
j
。
[0189][0190][0191]
式中:b
x
、b
x
为像片上和实地上的摄影基线长度;
[0192]
d
x
、d
y
为像片上和实地上的航线间隔宽度;
[0193]
l
x
、l
y
为摄影像幅的长度和宽度;
[0194]
p
x
、q
y
为航向和旁向重叠率;
[0195]
m
航
为航摄比例尺分母。
[0196]
其中,所述sar的观测方式是侧视,其天线的入射波束与地面法线之间夹角的范围设置为30
°‑
60
°
,即左侧sar天线入射波束的采样角度范围是
‑
30
°‑‑
60
°
,右侧sar天线入射波束的采样角度范围设置为30
°‑
60
°
;而其他遥感设备19的观测方式是下视,其传感器头入射波束与地面法线之间夹角的范围设置成
‑
30
°‑
30
°
,即入射波束的采样角度范围是
‑
30
°‑
30
°
。由此可见,侧视遥感设备19与下视遥感设备19 在相同条件下的对地观测范围是不一样的。为了确保所有遥感设备19 的对地观测范围一致,采取以下方法:
[0197]
1)在工控机15里打开陀螺稳定平台控制软件,点击“通讯设置”,设置角度参数,其
中,横滚角的范围设为:
‑
30
°‑
+30
°
;俯仰角的范围设为:
‑8°‑
+6
°
;旋偏角的范围设为:
‑
30
°‑
+30
°
;
[0198]
2)根据任务情况在50%
‑
75%中确定旁向重叠率,制作飞行计划,生成飞行航线;在工控机15中显示地图、飞行航线、飞机飞行轨迹和飞机位置信息;
[0199]
3)当飞机飞的第一条航线1位于作业区域的最西边或最南边时,通知飞行员将斜飞遥感飞机13绕飞机纵轴向左下倾斜30
°
,并保持此状态沿第一条航线1飞行,此时陀螺稳定平台会自动修正横滚角,使平台上的遥感设备19保持下视对地观测状态;
[0200]
4)在工控机15里打开sar天线转台40控制软件,设置转台向左下倾斜,设置转台上sar天线入射波束的采样角度范围为
‑
30
°‑‑
60
°
。此时,机腹sar天线和左侧sar天线入射波束的采样角度范围均为
ꢀ‑
30
°‑0°
;
[0201]
5)当工控机15上显示的飞机进入飞行航线时,开启所有遥感设备19,飞机保持该状态飞出该航线时,关闭所有遥感设备19;
[0202]
6)斜飞遥感飞机13转弯,准备飞第二条航线,通知飞行员将斜飞遥感飞机13绕飞机纵轴向右下倾斜30
°
,并保持此状态沿第二条航线5飞行,此时陀螺稳定平台会自动修正横滚角,使平台上的遥感设备19保持下视对地观测状态;
[0203]
7)在工控机15里打开sar天线转台40控制软件,设置转台向右下倾斜,设置转台上sar天线入射波束的采样角度范围为30
°‑
60
°
。此时,机腹sar天线和右侧sar天线入射波束的采样角度范围均为 0
°‑
30
°
:
[0204]
8)当工控机15上显示的飞机进入飞行航线时,开启所有遥感设备19,飞机保持该状态飞出该航线时,关闭所有遥感设备19;
[0205]
9)重复3)
‑
8)步,直到将作业区域所有的航线飞完,结束飞行任务。
[0206]
10)当飞机飞的第一条航线1位于作业区域的最东边或最北边时,通知飞行员将斜飞遥感飞机13绕飞机纵轴向右下倾斜30
°
,并保持此状态沿第一条航线1飞行,此时陀螺稳定平台会自动修正横滚角,使平台上的遥感设备19保持下视对地观测状态;
[0207]
11)在工控机15里打开sar天线转台40控制软件,设置转台向右下倾斜,设置转台上sar天线入射波束的采样角度范围为30
°‑
60
°
。此时,机腹sar天线和右侧sar天线入射波束的采样角度范围均为 0
°‑
30
°
;
[0208]
12)当工控机15上显示的飞机进入飞行航线时,开启所有遥感设备19,飞机保持该状态飞出该航线时,关闭所有遥感设备19;
[0209]
13)斜飞遥感飞机13转弯,准备飞第二条航线5,通知飞行员将斜飞遥感飞机13绕飞机纵轴向左下倾斜30
°
,并保持此状态沿第二条航线5飞行,此时陀螺稳定平台会自动修正横滚角,使平台上的遥感设备19保持下视对地观测状态;
[0210]
14)在工控机15里打开sar天线转台40控制软件,设置转台向左下倾斜,设置转台上sar天线入射波束的采样角度范围为
‑
30
°‑‑
60
°
。此时,机腹sar天线和左侧sar天线入射波束的采样角度范围均为
ꢀ‑
30
°‑0°
;
[0211]
15)当工控机15上显示的飞机进入飞行航线时,开启所有遥感设备19,飞机保持该状态飞出该航线时,关闭所有遥感设备19;
[0212]
16)重复10)
‑
15)步,直到将作业区域所有的航线飞完,结束飞行任务。
[0213]
其中,所述sar天线的入射波束与地面法线之间夹角的范围也可以设置成其他范
围,不局限于30
°‑
60
°
,也可以是20
°‑
50
°
或25
°‑
55
°
等,范围区间长度小于40
°
;侧视的遥感设备19也不局限于sar一种,其他侧视遥感设备19如倾斜摄影航空相机也适用。
[0214]
其中,所述遥感设备19sar的距离分辨率是:
[0215][0216]
其中,τ是sar的脉冲宽度,c是光速,θ是sar天线入射波束侧视角。
[0217]
根据上述的方法,θ由
±
45
°
变成了
±
15
°
,这将导致δr变大,即距离分辨率降低。为了保证距离分辨率不降低,可以利用线性调频调制技术将较宽的脉冲调制成振幅大、宽度窄的脉冲,即减小τ,从而确保距离分辨率不会降低。其方法是:
[0218]
将谐波经线性频率调制,产生一个线性调频脉冲后发射脉冲,接收回波后,使脉冲通过在频率及时间关系上与发射时具有相反频率特性的匹配滤波器,先使接收的低频率回波在滤波器上有较大的延迟,然后使高频率回波有较小的延迟,从而把接收的脉冲信号以宽度更窄、幅度更大的形式提取出来。
[0219]
在脉冲宽度内,瞬时频率线性地由f
min
变化到f
max
,调频带宽δf=f
max
‑
f
min
。回波经过匹配滤波器生成的波形函数的包络(包络是由许多椭圆形曲线交织而成的一种图形,外观看起来是包起来的一样。包络在数学、信号处理、文学、经济学、传统中医学上都有自己独特的含义)是sin cδf,其波形主瓣很大,旁瓣很小,半功率宽度是即压缩后的脉冲宽度τ0,因此脉冲宽度被压缩为原来的且δf越大,被压缩的脉冲宽度越小,δr越小,距离分辨率越高。
[0220]
其中,f
min
是最小瞬时频率,f
max
是最大瞬时频率;sin c是辛格函数,
[0221]
其中,当步骤4)中的左侧sar天线入射波束的采样角度范围是
ꢀ‑
30
°‑0°
时,相应的右侧sar天线入射波束的采样角度范围则变为 60
°‑
90
°
,即右侧sar天线入射波束侧视角是75
°
。根据三角函数原理,当采样角度由30
°
变为60
°
时,对应的地面覆盖范围由h tan 30
°
变成 h tan 60
°
。
[0222]
其中,h是飞机相对航高,tan 90
°
=∞,可算得地面覆盖范围是原来的3倍,如果采样角度
‑
30
°‑
30
°
对应的覆盖范围是飞行计划中的第n条航线30,那么采样角度60
°‑
90
°
对应的覆盖范围是飞行计划中的第(3+n)
‑
第n条航线30,相当于提前获取了这几条航线对应的数据;同时,根据上述的方法,右侧sar天线入射波束侧视角由45
°
变成75
°
,提高了第(3+n)
‑
第n条航线30对应遥感数据的距离分辨率(根据之前步骤,sar数据相对于其他遥感设备19 少获取半条线,这样既可以弥补少的线,还可以比其它遥感设备19 多飞一些范围,并确保了距离分辨率)。同理,步骤7)、步骤11)和步骤14)都具备步骤4)的特征。
[0223]
本实用新型在飞行过程中采取特殊的飞行方法并通过工控机15 控制不同的设备,从而使不同类型的传感器实现共轴遥感,即在相同时空环境下实现对同一地表区域的
对地观测,减少了冗余飞行,提高了航空遥感的工作效率,能够更快、更便捷地完成基于多传感器的航空遥感任务。
[0224]
本实用新型能够比传统航空遥感更快更便捷地完成遥感监测任务,能够得到两种成果:1)多源遥感数据成果;2)共轴遥感数据成果。因此,工作效率得以提高。
[0225]
共轴遥感:指多种不同类型的传感器在相同时空环境下实现对同一区域的遥感对地观测。
[0226]
斜飞遥感飞机:即具有斜飞能力的遥感飞机,该飞机在确保飞行员座椅固定、工作人员座椅固定、机内设备仪器固定的情况下,能够绕飞机纵轴倾斜一定角度飞行而不出现故障。
[0227]
陀螺稳定平台:简称陀螺平台、惯性平台,是利用陀螺仪特性保持平台台体方位稳定的装置。
[0228]
定位定向系统:定位定向系统(position&orientation system,简称 pos)集dgps(differential gps)技术和惯性导航系统(ins)技术于一体,可以获取移动物体的空间位置和三轴姿态信息,广泛应用于飞机轮船和导弹的导航定位。
[0229]
imu:是测量物体三轴姿态角及加速度的装置。一般imu包括三轴陀螺仪及三轴加速度计,某些9轴imu还包括三轴磁力计
[0230]
gnss:gnss的全称是全球导航卫星系统 (global navigation satellite system),它是泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的gps、俄罗斯的glonass、欧洲的galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的waas(广域增强系统)、欧洲的egnos(欧洲静地导航重叠系统)和日本的msas(多功能运输卫星增强系统)等,还涵盖在建和以后要建设的其他卫星导航系统。
[0231]
pwm:指脉冲宽度调制。脉冲宽度调制是一种模拟控制方式,根据相应载荷的变化来调制晶体管基极或mos管栅极的偏置,来实现晶体管或mos管导通时间的改变,从而实现开关稳压电源输出的改变
[0232]
tnc:一种天线接口。
[0233]
bnc:一种用于同轴电缆的连接头。
[0234]
fms:飞行管理系统的简称。
[0235]
rs
‑
232:常用的串行通信接口标准之一,它是由美国电子工业协会(eia)联合贝尔系统公司、调制解调器厂家及计算机终端生产厂家于1970年共同制定,其全名是“数据终端设备(dte)和数据通信设备 (dce)之间串行二进制数据交换接口技术标准”。
[0236]
com:串行通讯端口,简称串口。
[0237]
lpt:打印终端(line print terminal),用于连接打印机或扫描仪的并行通讯端口。
[0238]
显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本实用新型的技术方案所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1