一种牵引式农机具作业阻力和作业面积的测量装置的制作方法
:
1.本实用新型属于农业机械技术领域,具体涉及一种牵引式农机具作业阻力和作业面积的测量装置。
背景技术:
:
2.目前,我国农业机械除了少部分采用自带动力的自走式作业外,其余大部分的农业机械都是以拖拉机为动力带动作业,主要包括悬挂式农机具、半悬挂式农机具和牵引式农机具三种。牵引式农机具是农业机械的主要类型,通过牵引架与拖拉机的牵引点连接进行作业。由于牵引式农机具在田间作业时,由于地表不平和土壤坚实度变化较大等影响,会引起牵引式农机具作业时振动和起伏,导致安装在牵引架和农机具铰接点处的应力式销轴传感器转动,严重影响作业阻力测量精度,甚至无法测量。传统牵引式农机具无法及时将农机具负载时的作业阻力数据和作业面积数据进行记录、监控及反馈,因此就无法根据实际的作业情况对农机具的作业状态进行调整和智能化管理,制约了牵引式农机具的智能化管理水平。
技术实现要素:
:
3.本实用新型为克服现有设备无法及时精确测量农机具的作业阻力和作业面积的缺陷,提供了一种牵引式农机具作业阻力和作业面积的测量装置,测量装置能够及时获取作业阻力和作业面积的数据,并进行存储,可使管理人员及时了解牵引式农机具的作业进度,根据农机具的作业性能、作业效率和使用寿命,及时进行调整,避免设备的损坏,节约了生产成本。
4.本实用新型采用的技术方案在于:一种牵引式农机具作业阻力和作业面积的测量装置,包括:阻力测量装置、角度测量装置和速度测量装置,所述速度测量装置安装在拖拉机上,用来采集拖拉机的作业速度,所述阻力测量装置和角度测量装置均设置在位于拖拉机与牵引式农机具之间的三角形牵引架上,所述三角形牵引架包括左拉杆和右拉杆,左拉杆和右拉杆均通过阻力测量装置安装在牵引式农机具的农机具牵引臂上,且左拉杆和右拉杆与对应的阻力测量装置之间设置有用来防止阻力测量装置产生旋转的定位拉杆,所述角度测量装置安装在左拉杆或右拉杆上,且阻力测量装置、角度测量装置和速度测量装置将采集的信号输送至测试显示器实现运算、存储及显示。
5.优选地,所述阻力测量装置采用应力式销轴传感器,在应力式销轴传感器的一端加工有定位拉杆安装孔,且定位拉杆安装孔的开孔方向与应力式销轴传感器的受力牵引方向相垂直。
6.优选地,所述定位拉杆整体呈l型,其包括竖直段和水平段,所述竖直段与对应的左拉杆或右拉杆中间加工的定位拉杆固定孔铰接,所述水平段的端部安装在定位拉杆安装孔内,且在水平段的端部还开设有用来安装开口销的通孔,该通孔用来防止定位拉杆从定位拉杆安装孔内脱出。
7.优选地,所述速度测量装置采用gps速度传感器。
8.优选地,所述角度测量装置采用角度传感器。
9.本实用新型的有益效果是:
10.1、本实用新型采用应力式销轴传感器代替了传统三角形牵引架与农机具牵引臂连接时使用的销轴,并且在三角形牵引架的每个拉杆与对应的应力式销轴传感器之间还安装了定位拉杆,通过定位拉杆可有效避免应力式销轴传感器在作业过程中产生旋转与偏移,防止影响作业阻力测量精度情况的发生,可以解决应力式销轴传感器转动影响测力精度问题。此外,本实用新型通过设置gps速度传感器可同时测得作业面积信息,并通过测试显示器实现信息反馈。
11.2、本实用新型结构简单,设计合理,解决了牵引式农机具种类多、牵引架结构多样不好安装测量问题,使管理人员及时了解牵引式农机具的作业进度,根据农机具的作业性能、作业效率和使用寿命,及时进行调整,避免设备的损坏,节约了生产成本,对牵引式农机具的研究推广应用具有重要意义。
附图说明:
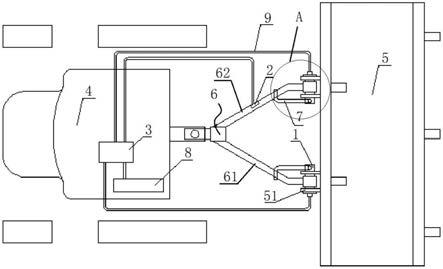
12.图1为本实用新型的结构示意图;
13.图2为图1的侧视图;
14.图3为图1中的a处放大图;
15.图4为阻力测量装置的结构示意图;
16.图5为定位拉杆的结构示意图;
17.其中:1阻力测量装置、11定位拉杆安装孔、2角度测量装置、3速度测量装置、4拖拉机、5牵引式农机具、51农机具牵引臂、6三角形牵引架、61左拉杆、62右拉杆、7定位拉杆、71竖直段、72水平段、8测试显示器、9电缆。
具体实施方式:
18.实施例1
19.如图1至图3所示,本实用新型为一种牵引式农机具作业阻力和作业面积的测量装置,包括:阻力测量装置1、角度测量装置2和速度测量装置3,所述阻力测量装置1和角度测量装置2均设置在位于拖拉机4与牵引式农机具5之间的三角形牵引架6上,所述速度测量装置3安装在拖拉机4上,阻力测量装置1、角度测量装置2和速度测量装置3将采集的信号输送至测试显示器8实现运算、存储及显示。
20.所述三角形牵引架6的两端分别与拖拉机4的牵引端和牵引式农机具5连接,三角形牵引架6包括左拉杆61和右拉杆62,且左拉杆61和右拉杆62的一端相交,且相交端与拖拉机4的牵引端相连;左拉杆61和右拉杆62另一端分别用来与牵引式农机具5的农机具牵引臂51连接。所述左拉杆61和右拉杆62的铰接孔与其对应农机具牵引臂51的铰接孔中,均安装有一个阻力测量装置1。
21.如图4所示,所述阻力测量装置1采用应力式销轴传感器,应力式轴销传感器是一个直接测力部件,起到拖拉机4与牵引式农机具5的连接轴作用,牵引式农机具的作业阻力全部通过这应力式轴销传感器实现传递,并能够测出牵引式农机具作业时的阻力。在应力
式销轴传感器的一端加工法兰结构,在应力式销轴传感器的另一端加工有定位拉杆安装孔11,定位拉杆安装孔11的开孔方向与应力式销轴传感器的受力牵引方向相垂直。
22.牵引式农机具5在田间作业时,由于地表不平和土壤坚实度变化较大等影响,引起牵引式农机具5产生振动和起伏,导致安装在三角形牵引架6和农机具牵引臂51铰接点处的应力式销轴传感器产生转动。应力式销轴传感器做为直接测力的一次元件,要求标定的受力方向必须与牵引式农机具5作业时的受力方向一致,不然会严重影响作业阻力测量精度,甚至无法测量。为了避免因阻力测量装置1在作业时产生旋转与偏移,而影响测量结果,在左拉杆61和右拉杆62与对应的阻力测量装置1之间设置有定位拉杆7,在左拉杆61和右拉杆62上分别加工有用来与定位拉杆7连接的定位拉杆固定孔。
23.如图5所示,所述定位拉杆7整体呈l型,其包括竖直段71和水平段72,所述竖直段71与对应在左拉杆61或右拉杆62上加工的定位拉杆固定孔相铰接,所述水平段72的端部安装在定位拉杆安装孔11内,为了防止定位拉杆7从定位拉杆安装孔11内脱出,在水平段72的端部还开设有用来安装开口销的通孔。
24.所述角度测量装置2采用角度传感器,其安装在左拉杆61或右拉杆62的中部,用来采集在作业过程中三角形牵引架6与水平面之间产生的水平夹角。
25.所述速度测量装置3采用gps速度传感器,在拖拉机4上还安装有测试显示器8,阻力测量装置1、角度测量装置2和速度测量装置3分别将采集到的数据通过电缆9传输给测试显示器8,实现电连接。
26.实施例2
27.实施例2为采用实施例1中测量装置所使用的测量方法,具体包括以下步骤:
28.步骤1:作业阻力测量方法:
29.步骤11:当拖拉机4带动牵引式农机具5作业时,通过位于三角形牵引架6左拉杆61和右拉杆62上的应力式销轴传感器分别采集左拉杆61和右拉杆62作业时的拉力值,且左拉杆的拉力值为n1和右拉杆的拉力值为n2;
30.步骤12:通过位于三角形牵引架6左拉杆61和右拉杆62上的角度传感器分别采集左拉杆61和右拉杆62在作业时,三角形牵引架6与水平面之间产生的水平夹角值β;
31.步骤13;通过步骤11和步骤12得出,当牵引式农机具5的拉力与其前进方向一致时,与牵引式农机具5的作业阻力f方向相反,且大小相同即作业阻力f=拉力n,因此,牵引式农机具5的作业阻力f应为三角形牵引架6中左拉杆61的拉力值n1和右拉杆62的拉力值n2的水平方向合力,左拉杆61拉力n1的水平方向拉力值为n1cosβ,右拉杆62拉力n2的水平方向拉力值为n2cosβ,故牵引式农机具5的作业阻力f运算公式为:n=n1cosβ+n2cosβ。
32.步骤2:作业面积测量方法:
33.步骤21:牵引式农机具5作业前,拖拉机4上安装一台速度测量装置3,即gps速度传感器,并将其信号输出端通过电缆9与测试显示器8连接,用以测量牵引式农机具5的作业速度。由于不同类型不同型号的牵引式农机具5其作业幅宽不同,是一个变量,作业面积测量前需要在测试显示器8上输入机具作业幅宽,用秒表在作业开始时记录作业时长,并在作业结束后将时长输入到测试显示器8内;
34.步骤22:在牵引式农机具5作业时,通过gps速度传感器采集牵引式农机具5的作业速度v,根据记录的作业时间t和已知的机具作业幅宽l,得出牵引式农机具5作业面积s的运
算公式为:s=v
×
t
×
l;
35.步骤3:所述测试显示器8中包括采集模块、cpu中央处理模块、显示模块,其中采集模块用来采集并存储应力式销轴传感器、角度传感器和gps速度传感器反馈牵引式农机具5作业时的数据,cpu中央处理模块将采集和存储的数据进行计算,根据作业阻力值、作业时间和作业速度值计算得出作业阻力值和作业面积值,通过显示模块显示给使用者。
36.以上所述,仅为本实用新型较佳的具体实施方式,这些具体实施方式都是基于本实用新型整体构思下的不同实现方式,而且本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1