一种小巧轻便低成本的组合导航系统装置的制作方法
1.本发明涉及组合导航系统技术领域,尤其涉及一种小巧轻便低成本的组合导航系统装置。
背景技术:
2.在自动驾驶领域内的定位装置,组合导航系统当前市场上都是体积较大,不易安装在乘用车内,同时,也是内置了通讯模块获取基准站的差分数据,然而自动驾驶大系统里面,是包含远程上网功能的,内置的通讯模块可以获取基准站的差分数据,在将差分数据通过用户接口输入给组合导航系统,因此,当前的组合导航系统内的远程通信模块是不需要的,同时主控mcu使用的是高频额cortex
‑
m7,并没有使用amr9或者cortex
‑
a7等高端cpu,这类高端cpu,需要大量的外围器件,如pmic电源管理芯片、ddr3、nor flash等,起到很大的节约成本,以及减小pcb板的设计复杂度,使得组合导航系统低成本、体积小巧、轻便、易于安装。
3.为解决组合导航系统装置体积大,成本高,不易安装在乘用车内,接口数量少,不能满足系统要求,存储空间小,针对上述问题,提出了一种小巧轻便低成本的组合导航系统装置,用以解决上述所提出的问题。
技术实现要素:
4.基于背景技术存在的技术问题,本发明提出了一种小巧轻便低成本的组合导航系统装置。
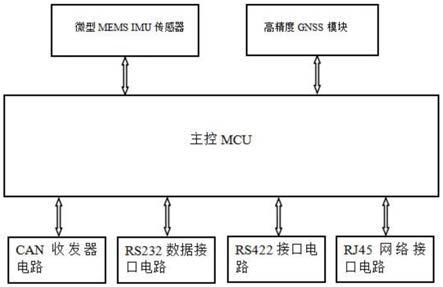
5.本发明提出的一种小巧轻便低成本的组合导航系统装置,包括主控mcu,精密微型mems imu传感器模块,高精度gnss模块,电源模块以及多个用户接口,所述精密微型mems imu传感器模块,高精度gnss模块,以及多个用户接口均与主控mcu电性连接,电源模块为主控mcu,精密微型mems imu传感器模块,高精度gnss模块,以及多个用户接口供电。
6.进一步的,所述多个用户接口包括:can收发器接口,rs232数据接口,rs422接口,rj45网络接口,用户可以选择任一接口与自动驾驶系统进行数据通讯,外部通讯模组获取到基准站坐标信息的差分信号,通过任一接口,都可以输入到组合导航系统,提高gnss模块的位置精度。
7.进一步的,所述主控mcu采用意法半导体公司的高性能系列stm32h743系列作为主控制器,cortex
‑
m7内核32位risc核心操作系统,主频达到400mhz。
8.进一步的,所述自动驾驶系统通过数据接口连接,获取远程基准站的差分数据,本装置无远程通信模块,通过接口来连接自动驾驶系统的远程通信模块。
9.进一步的,所述主控mcu具有2mb的flash闪存,1mb的ram,接口资源非常丰富(uart/spi/iic/adc/can等)满足系统要求,所述主控mcu的2mb flash闪存,使其代码有大量的存储空间,不像arm平台,需要外扩存储器存储代码,另外,mcu片上的1mb ram缓存,使其代码运行有足够的缓存,不在需要外扩连接缓存器,组合导航系统的成本下降。
10.进一步的,所述精密微型mems imu传感器模块包括一个三轴陀螺仪和一个三轴加速度,用来测量载体的运动加速度和偏转、倾斜时的转动角速度,外形体积小,便于安装在组合导航系统中。
11.进一步的,所述高精度gnss模块,多频gnss模块,提供厘米级的位置精度,将精确的位置信息数据通过串口输出给主控mcu处理。
12.本发明的有益效果是:本发明采用高性能、高主频的cotex
‑
m7的内核主控mcu,外围电路简单,替代了以往的复杂型设计的arm级高端芯片,节约成本以及pcb板面积,同时采用自动驾驶领域内的远程控制系统,获取基准站的差分信息,以此提高组合导航系统的定位精度,同时提供多个用户接口,用户可以随意的选择,提高产品兼容性。
附图说明
13.图1是本发明的示意图;
14.图2是本发明中的系统框图。
具体实施方式
15.下面结合具体实施例对本发明作进一步解说。
16.实施例一
17.如图1
‑
2所示,一种小巧轻便低成本的组合导航系统装置,包括主控mcu,精密微型mems imu传感器模块,高精度gnss模块,电源模块以及多个用户接口,所述精密微型mems imu传感器模块,高精度gnss模块,以及多个用户接口均与主控mcu电性连接,电源模块为主控mcu,精密微型mems imu传感器模块,高精度gnss模块,以及多个用户接口供电。
18.本发明中,所述多个用户接口包括:can收发器接口,rs232数据接口,rs422接口,rj45网络接口,用户可以选择任一接口与自动驾驶系统进行数据通讯,外部通讯模组获取到基准站坐标信息的差分信号,通过任一接口,都可以输入到组合导航系统,提高gnss模块的位置精度。
19.本发明中,所述主控mcu采用意法半导体公司的高性能系列stm32h743系列作为主控制器,cortex
‑
m7内核32位risc核心操作系统,主频达到400mhz。
20.本发明中,所述自动驾驶系统通过数据接口连接,获取远程基准站的差分数据,本装置无远程通信模块,通过接口来连接自动驾驶系统的远程通信模块。
21.本发明中,所述主控mcu具有2mb的flash闪存,1mb的ram,接口资源非常丰富(uart/spi/iic/adc/can等)满足系统要求,所述主控mcu的2mb flash闪存,使其代码有大量的存储空间,不像arm平台,需要外扩存储器存储代码,另外,mcu片上的1mb ram缓存,使其代码运行有足够的缓存,不在需要外扩连接缓存器,组合导航系统的成本下降。
22.本发明中,所述精密微型mems imu传感器模块包括一个三轴陀螺仪和一个三轴加速度,用来测量载体的运动加速度和偏转、倾斜时的转动角速度,外形体积小,便于安装在组合导航系统中。
23.本发明中,所述高精度gnss模块,多频gnss模块,提供厘米级的位置精度,将精确的位置信息数据通过串口输出给主控mcu处理。
24.工作原理:本发明通过can接口和rs232接口分别与乘用车的自动驾驶领域系统的
can接口和rs232接口相连接,rs232接口用于连接自动驾驶系统的远程通信模块,获取基准站的差分数据,并将差分数据送入主控mcu做数据处理,同时,与本装置内置的gnss模块的定位数据同步进行融合解算,另外,主控mcu实时的读取imu传感器的数据,将以上三者数据再次融合,进行算法库的解算,以此获得高精度的定位信息,将解算后的结果通过can接口输出给自动驾驶系统。
25.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1