一种滩涂型静力触探装置以及方法与流程
1.本发明涉及海洋勘探工程技术领域,尤其涉及一种滩涂型静力触探装置以及方法。
背景技术:
2.滩涂,是海滩、河滩和湖滩的总称,指沿海大潮高潮位与低潮位之间的潮浸地带,其属于重要的后备土地资源,具有面积大、分布集中、区位条件好、农牧渔业综合开发潜力大的特点。滩涂是一个处于动态变化中的海陆过渡地带。向陆方向发展,通过围垦、引淡洗盐,可较快形成农牧渔业畜产用地;向海方向发展,可进一步成为开发海洋的前沿阵地。滩涂是水产养殖和发展农业生产的重要基地,是开发海洋、发展海洋产业的一笔宝贵财富。滩涂不仅是一种重要的土地资源和空间资源,而且本身也蕴藏着各种矿产、生物及其他海洋资源。
3.然而,尽管其勘探深度在3米左右,但由于其地理位置特殊,进行静力触探时,容易受到潮汐海浪等因素的干扰,导致静力触探的精度无法得到保证,尤其是贯入的角度容易发生偏移,而大型的勘探船只受限于水深等问题无法进入该区域进行作业,导致无法有效对滩涂进行地质勘探。
技术实现要素:
4.为了克服现有技术的不足,本发明的目的之一在于提供一种滩涂型静力触探装置,其能解决现有设备受到潮汐海浪等因素的干扰,无法有效对滩涂进行地质勘探的问题。
5.为了克服现有技术的不足,本发明的目的之二在于提供一种滩涂型静力触探装置,其能解决现有设备受到潮汐海浪等因素的干扰,无法有效对滩涂进行地质勘探的问题。
6.为了达到上述目的之一,本发明所采用的技术方案如下:
7.一种滩涂型静力触探装置,包括设置在船只上的固定机架、用于导向探杆的导向机构、用于驱使导向机构处于状态一和状态二其中一种的旋转机构、用于进行静力触探的探杆和控制器,所述导向机构包括用于驱使探杆贯入海床的贯入组件、内部设置有导向通道的套管和用于驱使探杆垂直于海床的配重组件,所述贯入组件设置在导向通道中,所述探杆与贯入组件连接,所述导向通道的输出端与配重组件连接,所述固定机架通过旋转机构与套管连接,所述贯入组件和旋转机构均与控制器连接;所述状态一为所述导向机构沿水平方向设置;所述状态二为所述导向机构沿垂直方向设置。
8.优选的,所述配重组件包括用于驱使导向机构保持垂直状态的配重体和设置在配重体中部的导向管,所述导向通道的输出端与导向管的输入端连接。
9.优选的,所述配重体呈柱体结构设置。
10.优选的,还包括若干吊环,所述吊环与套管靠近配重组件的一端连接。
11.优选的,所述贯入组件包括设置在导向通道中的贯入框架、若干用于驱使探杆沿轴向贯入海床的摩擦轮和贯入电机,所述贯入电机的输出端与摩擦轮连接,所述探杆与贯
入框架连接,所述贯入框架通过摩擦轮与套管连接,所述贯入电机与控制器连接。
12.优选的,所述旋转机构包括旋转支座、旋转电机、旋转支柱和夹持件,所述旋转电机通过旋转支座与固定机架连接,所述旋转电机与控制器连接,所述旋转电机的输出端通过旋转支柱与夹持件连接,所述夹持件与套管可拆卸连接。
13.优选的,所述夹持件包括一侧设置有用于固定套管的卡槽的固定夹块、连接杆、滑动连接在连接杆上的活动夹块和夹持液压缸,所述连接杆的一端与旋转支柱连接,所述固定夹块的一侧与连接杆的另一端连接,所述活动夹块设置在固定夹块和旋转支柱之间,所述夹持液压缸的输出端与活动夹块远离固定夹块的一侧端面连接,所述夹持液压缸与控制器连接。
14.优选的,还包括平移组件,所述平移组件包括滚珠螺杆和平移驱动件,所述平移驱动件通过滚珠螺杆与旋转支柱连接,所述平移驱动件与控制器连接;所述平移驱动件,用于通过滚珠螺杆驱使旋转支柱带动导向机构沿远离平移驱动件方向或者靠近平移驱动件方向移动。
15.为了达到上述目的之二,本发明所采用的技术方案如下:
16.一种滩涂型静力触探方法,所述方法包括一应用于滩涂型静力触探装置的控制器,滩涂型静力触探装置包括设置在船只上的固定机架、用于导向探杆的导向机构、用于驱使导向机构处于状态一和状态二其中一种的旋转机构、用于进行静力触探的探杆和控制器,所述导向机构包括用于驱使探杆贯入海床的贯入组件、内部设置有导向通道的套管和用于驱使探杆垂直于海床的配重组件,所述贯入组件设置在导向通道中,所述探杆与贯入组件连接,所述导向通道的输出端与配重组件连接,所述固定机架通过旋转机构与套管连接,所述贯入组件和旋转机构均与控制器连接;所述状态一为所述导向机构沿水平方向设置;所述状态二为所述导向机构沿垂直方向设置;所述配重组件包括用于驱使导向机构保持垂直状态的配重体和设置在配重体中部的导向管,所述导向通道的输出端与导向管的输入端连接;所述配重体呈柱体结构设置;还包括若干吊环,所述吊环与套管靠近配重组件的一端连接;所述贯入组件包括设置在导向通道中的贯入框架、若干用于驱使探杆沿轴向贯入海床的摩擦轮和贯入电机,所述贯入电机的输出端与摩擦轮连接,所述探杆与贯入框架连接,所述贯入框架通过摩擦轮与套管连接,所述贯入电机与控制器连接;所述旋转机构包括旋转支座、旋转电机、旋转支柱和夹持件,所述旋转电机通过旋转支座与固定机架连接,所述旋转电机与控制器连接,所述旋转电机的输出端通过旋转支柱与夹持件连接,所述夹持件与套管可拆卸连接;所述夹持件包括一侧设置有用于固定套管的卡槽的固定夹块、连接杆、滑动连接在连接杆上的活动夹块和夹持液压缸,所述连接杆的一端与旋转支柱连接,所述固定夹块的一侧与连接杆的另一端连接,所述活动夹块设置在固定夹块和旋转支柱之间,所述夹持液压缸的输出端与活动夹块远离固定夹块的一侧端面连接,所述夹持液压缸与控制器连接;还包括平移组件,所述平移组件包括滚珠螺杆和平移驱动件,所述平移驱动件通过滚珠螺杆与旋转支柱连接,所述平移驱动件与控制器连接;所述平移驱动件,用于通过滚珠螺杆驱使旋转支柱带动导向机构沿远离平移驱动件方向或者靠近平移驱动件方向移动;
17.所述控制器包括储存器和处理器;
18.储存器,用于存储程序指令;
19.处理器,用于运行所述程序指令,以执行以下步骤:
20.s1:通过平移驱动件驱使滚珠螺杆将导向机构沿远离平移驱动件方向移动;
21.s2:驱使旋转电机通过旋转支柱将导向机构旋转至沿垂直方向设置;
22.s3:通过夹持件驱使活动夹块沿连接杆向远离固定夹块的方向移动,以使导向机构与夹持件互相分离,并在配重体的作用下垂直下落至海床上;
23.s4:通过贯入电机驱使摩擦轮沿正向转动,以使探杆依次通过导向通道和导向管贯入海床,进行静力触探作业;
24.s5:通过贯入电机驱使摩擦轮沿反向转动,以使探杆回收至导向通道中;
25.s6:通过夹持件驱使活动夹块沿连接杆向靠近固定夹块的方向移动,以使套管被夹持在卡槽中;
26.s7:驱使旋转电机通过旋转支柱将导向机构旋转至沿水平方向设置;
27.s8:通过平移驱动件驱使滚珠螺杆将导向机构沿靠近平移驱动件方向移动。
28.相比现有技术,本发明的有益效果在于:通过旋转机构调整导向机构摆向,实现导向机构在状态一(沿水平方向设置)和状态二(沿垂直方向设置)之间变换,方便运输以及便捷实现勘探作业的开展,并且通过配重组件来驱使探杆垂直于海床,以抵抗潮汐海浪的干扰,减少贯入方向调整的工序,降低勘探难度。具体的,需要对导向机构进行运输时,则通过旋转机构驱使导向机构处于状态一(沿水平方向设置),使之能够稳固安全地装载在船只甲板上,以便于运输至勘探地点。到达勘探地点后,再通过旋转机构驱使导向机构处于状态二(沿垂直方向设置),使之能够脱离船只,下放到滩涂中,并在配重组件的带动下,导向机构垂直下落到海床上,使船只受潮汐海浪产生的晃动无法传递到导向机构上,确保探杆的贯入方向稳定性和准确性,再由贯入组件驱使探杆贯入海床进行静力触探,完成静力触探作业后,再由贯入组件驱使探杆离开海床回到导向通道中,以备下次使用,并通过旋转机构驱使导向机构复位(状态一),即可再将滩涂型静力触探装置运输至下一地点,从而简化施工步骤,以实现便捷地滩涂进行静力触探的目的。
附图说明
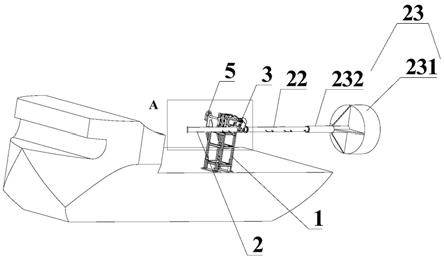
29.图1为本发明中所述的滩涂型静力触探装置处于状态一的结构示意图。
30.图2为图1中a区域的放大示意图。
31.图3为本发明中所述的滩涂型静力触探装置处于状态二的结构示意图。
32.图4为图3中b区域的放大示意图。
33.图5为本发明中所述的夹持件的结构示意图。
34.图6为本发明中所述的贯入组件的结构示意图。
35.图7为图6中c区域的放大示意图。
36.图中:1
‑
固定机架;2
‑
导向机构;21
‑
贯入组件;211
‑
贯入框架;212
‑
摩擦轮;213
‑
贯入电机;212
‑
贯入支座;22
‑
套管;221
‑
导向通道;23
‑
配重组件;231
‑
配重体;232
‑
导向管;3
‑
旋转机构;31
‑
旋转电机;32
‑
旋转支柱;33
‑
夹持件;331
‑
固定夹块;332
‑
连接杆;333
‑
活动夹块;334
‑
夹持液压缸;335
‑
卡槽;4
‑
吊环;5
‑
平移组件;51
‑
滚珠螺杆;52
‑
平移驱动件;6
‑
探杆。
具体实施方式
37.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
38.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
39.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
40.下面,结合附图以及具体实施方式,对本发明做进一步描述:
41.实施例一:
42.如图1
‑
7所示,一种滩涂型静力触探装置,包括设置在船只上的固定机架1、用于导向探杆6的导向机构2、用于驱使导向机构2处于状态一(如图1所示)和状态二(如图3所示)其中一种的旋转机构3和用于进行静力触探的探杆6,所述导向机构2包括用于驱使探杆6贯入海床的贯入组件21、内部设置有导向通道221的套管22和用于驱使探杆6垂直于海床的配重组件23,所述贯入组件21设置在导向通道221中,所述探杆6与贯入组件21连接,所述导向通道221的输出端与配重组件23连接,所述固定机架1通过旋转机构3与套管22连接;所述贯入组件21和旋转机构3均与控制器连接;所述状态一为所述导向机构2沿水平方向设置;所述状态二为所述导向机构2沿垂直方向设置。优选的,所述固定机架1不限于设置在船只上,还可以设置在车辆等运输工具上;具体的,当需要对导向机构2进行运输时,则通过旋转机构3驱使导向机构2处于状态一(沿水平方向设置),使之能够稳固安全地装载在船只甲板上,以便于运输至勘探地点。到达勘探地点后,再通过旋转机构3驱使导向机构2处于状态二(沿垂直方向设置),使之能够下放,并在配置组件的带动下,进入到水域中,进行静力触探。优选的,所述配重组件23包括用于驱使导向机构2保持垂直状态的配重体231和设置在配重体231中部的导向管232,所述导向通道221的输出端与导向管232的输入端连接。进一步的,所述配重体231呈柱体结构设置,即配重体231中部为配重体231的中心,简化制造工艺,在本实施中,利用配重体231本身的受到的重力比较大,以使得配重体231能够驱使导向机构2垂直地下落到海床中,以抵抗潮汐海浪的干扰,并且通过在配重体231的中部设置与导向通道221连通的导向管232,降低起始贯入点存在较大倾斜角度的可能性。优选的,所述配重体还可以为若干沿圆周方向设置在套管底端外壁的重物;进一步的,还包括若干吊环4,所述吊环4与套管22靠近配重组件23的一端连接,用于向接线缆以及给作业人员提供扶手施力的位置,便于作业人员手动调节导向机构2的位置,使得重心保持平衡。具体的,如图6
‑
7所示,所述贯入组件21包括设置在导向通道221中的贯入框架211、若干用于驱使探杆6沿轴向贯入海床的摩擦轮212和贯入电机213,所述贯入电机213的输出端与摩擦轮212连接,所述探杆6与贯入框架211连接,所述贯入框架211通过摩擦轮212与套管连接,所述贯入电机213
与控制器连接;优选的,所述摩擦轮212沿圆周方向呈等间距设置在贯入框架211上。在本实施例中,探杆6可以设置在所述贯入框架211靠近海床的一端,当贯入电机213驱使摩擦轮212正转时,探杆6在摩擦轮212提供向下的推力的作用下贯入海床,贯入电机213驱使摩擦轮212反转时,探杆6在摩擦轮212提供向上的拉力的作用下离开海床,收回到导向通道221中。进一步的,所述贯入组件和探杆6均通过弹簧电缆与船上设备连接,以减少船只受波浪产生的晃动传递到贯入组件和探杆6上。进一步的,导向通道221的末端或者导向管的末端设置有台阶状结构,防止贯入框架211从底部滑出,在贯入电机213驱使摩擦轮212正转时,摩擦轮212与套管的导向通道221接触,给探杆6和贯入框架211向下的作用力,防止探杆6和贯入框架211因贯入的反力向上运动,起拔探杆6时,贯入电机213驱使摩擦轮212反转,贯入框架211和探杆6向上运动,同时完成探杆6和贯入框架211的回收工作。
43.具体的,所述旋转机构3包括旋转支座、旋转电机31、旋转支柱32和夹持件33,所述旋转电机31通过旋转支座与固定机架1连接,所述旋转电机31与控制器连接,所述旋转电机31的输出端通过旋转支柱32与夹持件33连接,所述夹持件33与套管22可拆卸连接。优选的,所述旋转支柱32与旋转电机31活动连接,还可以通过平移组件5驱使旋转支柱32带动导向机构2沿水平方向进行移动,具体的,所述平移组件5包括滚珠螺杆51和平移驱动件52,所述平移驱动件52通过滚珠螺杆51与旋转支柱32连接;所述平移驱动件52,用于通过滚珠螺杆51驱使旋转支柱32带动导向机构2沿远离平移驱动件52方向或者靠近平移驱动件52方向移动。
44.在本实施例中,如图1
‑
5所示,进行勘探前,将导向机构2的探管锁紧在旋机构的夹持件33上,使导向机构2处于状态一(沿水平方向设置),使之能够稳固安全地装载在船只甲板上,以便于运输至勘探地点。当到达勘探地点后,通过旋转平移组件5的平移驱动件52,平移驱动件52通过滚珠螺杆51驱使旋转支柱32带动导向机构2沿远离平移驱动件52方向移动,即通过转动平移驱动件52驱使导向机构2远离甲板的正上方,避免导向机构2从状态一转换成状态二时,导向机构2与甲板发生碰撞的事故;当导向机构2完全离开甲板的正上方后,旋转电机31通过旋转支柱32驱使夹持在夹持件33上的导向机构2旋转至与海平面或海床垂直的方向(状态一转变成状态二),然后松开夹持件33,套管22与夹持件33互相分离,套管22在配重体231的带动下,作近似于自由落体运动,最终垂直下落到海床上,然后贯入组件21中的贯入组件21驱使探杆6贯入海床,进行静力触探;勘探完成后,贯入组件21回收探杆6,重新通过夹持件33将导向机构2的探管锁紧,然后旋转电机31通过旋转支柱32驱使夹持在夹持件33上的导向机构2旋转至沿水平设置(状态二转变成状态一),再通过旋转平移组件5的平移驱动件52,令到滚珠螺杆51驱使旋转支柱32带动导向机构2移动到甲板的上方,进一步的,作业人员可以通过吊环4进一步移动导向装置,以使得沿水平方向设置的导向机构2重心保持平衡。
45.优选的,如图5所示,所述夹持件33包括一侧设置有用于固定套管22的卡槽335的固定夹块331、连接杆332、滑动连接在连接杆332上的活动夹块333和夹持液压缸334,所述连接杆332的一端与旋转支柱32连接,所述固定夹块331的一侧与连接杆332的另一端连接,所述活动夹块333设置在固定夹块331和旋转支柱32之间,所述夹持液压缸334的输出端与活动夹块333远离固定夹块331的一侧端面连接,所述夹持液压缸334与控制器连接;在本实施例中,夹持件33夹持套管22时,夹持液压缸334驱使活动夹块333向固定夹块331方向施
压,以使得套管22被加持在卡槽335中,下放套管22时,夹持液压缸334驱使活动夹块333向远离固定夹块331方向移动,以使套管22可从卡槽335中离开,即此时导向机构2与船只分离,船只受潮汐海浪产生的晃动无法传递到导向机构2上,有效保证贯入方向稳定性和准确性。
46.实施例二:
47.一种滩涂型静力触探方法,所述方法包括一应用于实施例一中的滩涂型静力触探装置的控制器,所述控制器包括储存器和处理器;
48.储存器,用于存储程序指令;
49.处理器,用于运行所述程序指令,以执行以下步骤:
50.s1:通过平移驱动件52驱使滚珠螺杆51将导向机构2沿远离平移驱动件52方向移动;
51.具体的,通过船只将滩涂型静力触探装置运输至预定的勘探位置,通过平移驱动件52驱使滚珠螺杆51将导向机构2沿远离平移驱动件52方向移动,其中,所述控制器可以为单片机等数据处理装置,所述平移驱动件52可以为把手或者电机等驱动机构,当平移驱动件52为把手时,则控制器通过提示灯或者警报器提醒操作工人旋转把手,驱使导向机构2远离甲板的正上方,以便于旋转导向机构2从状态一转换成状态二,其中,所述状态一为所述导向机构2沿水平方向设置;所述状态二为所述导向机构2沿垂直方向设置。
52.s2:驱使旋转电机31通过旋转支柱32将导向机构2旋转至沿垂直方向设置;
53.具体的,当导向机构2完全离开甲板的正上方后,旋转电机31通过旋转支柱32驱使夹持在夹持件33上的导向机构2旋转至与海平面或海床垂直的方向(状态一转变成状态二),完成对贯入方向的第一步校准,在一定程度上确定贯入的方向。
54.s3:通过夹持件33驱使活动夹块333沿连接杆332向远离固定夹块331的方向移动,以使导向机构2与夹持件33互相分离,并在配重体231的作用下垂直下落至海床上;
55.具体的,夹持液压缸334驱使活动夹块333向远离固定夹块331方向移动,以使固定夹块331和活动夹块333对套管22不再起夹持作用,即导向机构2与夹持件33互相分离,也就是说,导向机构2与船只分离,船只受潮汐海浪产生的晃动无法传递到导向机构2上,有效保证贯入方向稳定性和准确性,套管22受自身以及配重体231的重力作用下,从卡槽335中离开,并作近似于自由落体运动,最终垂直下落到海床上,在下放过程中,利用配重体231本身的受到的重力比较大,以使得配重体231能够驱使导向机构2垂直地下落到海床中,以抵抗潮汐海浪的干扰,并且通过在配重体231的中部设置与导向通道221连通的导向管232,降低起始贯入点存在较大倾斜角度的可能性,以实现对贯入方向的自修正,维持导向机构2垂直地下落到海床中。
56.s4:通过贯入电机213驱使摩擦轮212沿正向转动,以使探杆6依次通过导向通道221和导向管232贯入海床,进行静力触探作业;
57.具体的,导向机构2垂直落到海床上后,开始静力触探作业,在本实施例中,探杆6可以设置在所述贯入框架211靠近海床的一端,当贯入电机213驱使摩擦轮212正转时,以驱使探杆6贯入海床。进一步的,所述贯入组件和探杆6均通过弹簧电缆与船上设备连接,以减少船只受波浪产生的晃动传递到贯入组件和探杆6上。进一步的,导向通道221的末端或者导向管的末端设置有台阶状结构,防止贯入框架211从底部滑出,在贯入电机213驱使摩擦
轮212正转时,摩擦轮212与套管的导向通道221接触,给探杆6和贯入框架211向下的作用力,防止探杆6和贯入框架211因贯入的反力向上运动。
58.s5:通过贯入电机213驱使摩擦轮212沿反向转动,以使探杆6回收至导向通道221中
59.具体的,完成静力触探作业后,贯入电机213驱使摩擦轮212反转时,以驱使探杆6离开海床,收回到导向通道221中。当探杆6套嵌在贯入通道中,起拔探杆6时,贯入电机213驱使摩擦轮212反转,贯入框架211和探杆6向上运动,同时完成探杆6和贯入框架211的回收工作。
60.s6:通过夹持件33驱使活动夹块333沿连接杆332向靠近固定夹块331的方向移动,以使套管22被夹持在卡槽335中;
61.具体的,当静力触探完成后,回收探杆6,夹持液压缸334驱使活动夹块333向固定夹块331方向移动,以使套管22在活动夹块333的推压下,重新被夹持卡槽335中,以便于再次移动到下一个地点。
62.s7:驱使旋转电机31通过旋转支柱32将导向机构2旋转至沿水平方向设置;
63.具体的,当套管22被重新夹持住后,旋转电机31通过旋转支柱32驱使夹持在夹持件33上的导向机构2旋转至与甲板的方向(状态二转变成状态一),以使导向机构2离开水域,实现对导向机构2的快速回收。
64.s8:通过平移驱动件52驱使滚珠螺杆51将导向机构2沿靠近平移驱动件52方向移动。
65.具体的,通过平移驱动件52驱使滚珠螺杆51将导向机构2沿平移驱动件52方向移动,所述平移驱动件52可以为把手或者电机等驱动机构,当平移驱动件52为把手时,则控制器通过提示灯或者警报器提醒操作工人旋转把手,驱使导向机构2回到甲板的正上方,以便于船只将该滩涂型静力触探装置运输至下一地点,以及操作工人对滩涂型静力触探装置进行检修,当导向机构2回到甲板上,操作工人可通过吊环4,调整滩涂型静力触探装置的位置,以使装置的重心保持平衡,进一步保证滩涂型静力触探装置在运输过程中的平稳性。
66.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1