检测光学自由曲面反射镜面形的方法及装置
1.本发明涉及光学检测技术领域,特别涉及一种检测光学自由曲面反射镜面形的方法及装置。
背景技术:
2.自由曲面的定义很广泛,区别于工业上自由曲面不能用初等函数完全清楚的表达,在光学领域内的自由曲面主要是指非旋转对称的曲面,相较于球面、非球面具有更多的设计自由度来改变面型。正是由于更多的设计自由度,利用自由曲面可以在使用更少的光学元件数量的情况下,矫正光学系统的像差;利用自由曲面非旋转对称特性,可以突破传统的光学成像设计思路,具有更灵活的空间布局,更高的像差平衡能力。因此,自由曲面在照明系统、显示系统、成像系统等领域具有广泛的应用。然而,自由曲面在成像领域尚未进行大规模应用的原因是光学成像领域对自由曲面面形的高精度要求,难点主要表现为光学自由曲面的设计、加工和检测,其中光学自由曲面的检测尤为重要。
3.目前,光学自由曲面的检测方法主要是依据非球面检测方法进行了改进,大致可以分为轮廓检测法、波前斜率测量法以及干涉检测法。轮廓检测法分为接触式测量法和非接触式测量。其中,接触式测量方法主要代表有三坐标测量法和轮廓仪法,检测机理是对待测镜进行逐点或逐线的离散数据采样,从而获得采样位置的空间坐标。该方法需要进行大量的数据点采样,因此检测耗时长;检测头在接触待测面时,容易对元件表面产生划伤。非接触式轮廓测量法中,luphoscan是一种非接触式三维测量系统,面形检测精度在亚微米级,但其价格昂贵,且测量范围有限,尤其是在检测大口径自由曲面面形方面受到限制。波前斜率测量法通过测得x方向和y方向的横向像差偏离量,利用几何像差与波像差关系,经过数值积分获得面形。对于大曲率半径的自由曲面,该方法的检测动态范围受到限制,空间分辨率有限,对自由曲面面形中的高频信息产生平滑效果。干涉法检测原理是双光束干涉,产生的干涉条纹需在干涉仪的动态范围内。干涉法检测自由曲面时通常需要进行补偿,然而由于自由曲面面型的复杂性,补偿器受到设计制作的限制,难以单独完成补偿,采用多个补偿器叠加使用的方式或者若干子区域拼接检测的方式,进行零位或非零位的干涉检测。计算全息图(cgh)检测自由曲面的设计制作难度大,加工成本高,而且不通用;非零位检测中主要面临着回程误差的影响。综上所述,目前光学自由曲面的面形检测方法主要面临着检测精度与动态范围之间的矛盾。
技术实现要素:
4.本发明为解决上述问题,提供一种检测光学自由曲面反射镜面形的方法及装置。
5.为实现上述目的,本发明采用以下具体技术方案:
6.提供一种检测光学自由曲面反射镜面形的方法,包括步骤:
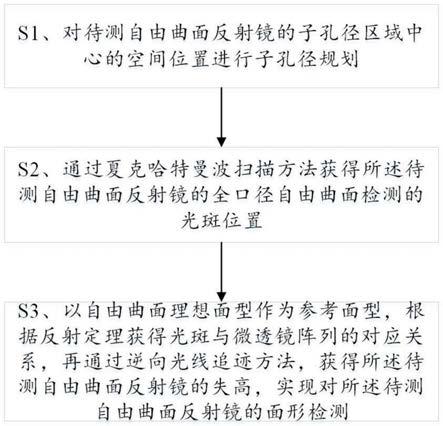
7.s1、对待测自由曲面反射镜的子孔径区域中心的空间位置进行子孔径规划;
8.s2、通过夏克哈特曼波扫描方法获得所述待测自由曲面反射镜的全口径自由曲面
检测的光斑位置;
9.s3、以理想自由曲面面型作为参考面型,根据反射定理获得光斑与微透镜阵列的对应关系,再通过逆向光线追迹方法,获得所述待测自由曲面反射镜的失高,实现对所述待测自由曲面反射镜的面形检测。
10.优选地,所述方法还包括步骤:s4、获得所述待测自由曲面反射镜的失高后,通过反复迭代,直至面形检测的面形精度rms优于5nm,实现对所述待测自由曲面反射镜的面形检测。
11.优选地,所述反复迭代包括:以获得失高对应的面型作为参考面型,获得第二失高;再以第二失高对应的面型作为参考面型,获得第三失高。
12.优选地,所述夏克哈特曼波扫描方法包括步骤:
13.s21、将平行光束垂直入射至所述待测自由曲面反射镜的子孔径区域中心,平行光束垂直入射所述待测自由曲面反射镜的反射波前被分为多个子波前区域,每个子波前经过微透镜阵列成像在电荷耦合器件上,获得光斑位置;
14.s22、按照所述子孔径规划移动所述待测自由曲面反射镜的位置,在不同位置分别按照步骤s21进行操作,获得所述全口径自由曲面检测的光斑位置。
15.优选地,所述步骤s21中,获得光斑位置包括:通过电荷耦合器件探测到光斑像素点,通过求其质心代表光斑位置。
16.优选地,所述步骤s3中所述通过逆向光线追迹方法,获得所述待测自由曲面反射镜的失高包括:通过逆向光线追迹方法,将通过所述光斑位置与所述微透镜阵列的中心的光线作为入射光线,将所述入射光线与所述理想自由曲面面型的交点的x、y坐标近似为所述平行光束入射到所述待测自由曲面反射镜的入射点的x、y坐标,根据反射定理获得所述待测自由曲面反射镜的失高。
17.本发明还提供一种检测光学自由曲面反射镜面形的装置,所述装置包括夏克哈特曼波扫描装置,所述夏克哈特曼波扫描装置包括激光光源、准直镜、分束器、微透镜阵列以及电荷耦合器件探测器;所述激光光源用于产生球面波,所述球面波经过所述准直镜变为平行光;所述平行光入射至所述分束器发生反射,形成反射光;所述反射光垂直入射至待测自由曲面反射镜的子孔径区域中心,形成面形信息反射光;所述面形信息反射光从所述分束器透射,形成透射光;所述微透镜阵列对所述透射光进行空间采样,分成若干小光束,所述若干小光束在所述电荷耦合器件探测器上分别会聚形成光斑像点。
18.优选地,所述装置还包括运动平台,所述运动平台用于搭载所述待测自由曲面反射镜,并带动所述待测自由曲面反射镜根据子孔径规划结果进行运动。
19.优选地,所述运动包括平移、偏转和旋转。
20.本发明所提供的检测光学自由曲面反射镜面形的方法,可通过计算得到光斑与微透镜阵列的对应关系,增大了检测动态范围;通过子孔径拼接的方法,提高了空间分辨率,通用性强;在恢复面型时,避免了利用斜率重构波前的计算误差;利用反射定理和迭代方法计算面型矢高,提高了面形检测的精度。
附图说明
21.图1是本发明一种实施例中检测光学自由曲面反射镜面形的方法流程图。
22.图2是本发明一种实施例中待测自由曲面反射镜的子孔径规划结果。
23.图3是本发明一种实施例中夏克哈特曼扫描拼接检测理想自由曲面反射镜的子孔径光线追迹图。
24.图4是本发明一种实施例中夏克哈特曼扫描拼接检测待测自由曲面反射镜的子孔径光线追迹图。
25.图5是本发明一种实施例中夏克哈特曼扫描方法的光路结构示意图。
26.附图标记:1、激光光源;2、准直镜;3、分束器;4、微透镜阵列;5、ccd探测器;6、待测自由曲面反射镜。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
28.如图1所示,为本发明一种实施例中检测光学自由曲面反射镜面形的方法流程图,具体的,所检测的面形为残差,即实际面型与理想(或参考)面型的差值。
29.在该具体实施例中,检测光学自由曲面反射镜面形的方法包括步骤:
30.s1、对待测自由曲面反射镜的子孔径区域中心的空间位置进行子孔径规划;
31.s2、通过夏克哈特曼波扫描方法获得所述待测自由曲面反射镜的全口径自由曲面检测的光斑位置;
32.s3、以理想自由曲面面型作为参考面型,根据反射定理获得光斑与微透镜阵列的对应关系,再通过逆向光线追迹方法,获得所述待测自由曲面反射镜的失高,实现对所述待测自由曲面反射镜的面形检测。
33.优选的实施方式中,检测光学自由曲面反射镜面形的方法还包括步骤s4、获得所述待测自由曲面反射镜的失高后,通过反复迭代,直至面形检测的面形精度rms优于5nm,实现对所述待测自由曲面反射镜的面形检测。具体的,所述反复迭代包括:以获得失高的面型作为参考面型,获得第二失高;再以第二失高对应的面型作为参考面型,获得第三失高。进一步还可以包括以第三失高对应的面型作为参考面型,获得第四失高等等,直至面形检测的面形精度rms优于5nm,实现对所述待测自由曲面反射镜的面形检测。
34.在一些具体实施方式中,通过反复迭代优化后,获得的待测自由曲面反射镜的面形检测的面型精度rms优于1/100λ。
35.本发明具体实施方式所提供的检测光学自由曲面反射镜面形的方法,可通过计算得到光斑与微透镜阵列的对应关系,增大了检测动态范围;通过子孔径拼接的方法,提高了空间分辨率,通用性强;在恢复面型时,避免了利用斜率重构波前的计算误差;利用反射定理和迭代方法计算面型矢高,提高了面形检测的精度。
36.本发明的具体实施方式中,步骤s1中利用子孔径拼接原理,对待测自由曲面反射镜的子孔径区域中心的空间位置进行子孔径规划。
37.具体的,利用如公式(1)所示的xy多项式表征自由曲面的面型:
[0038][0039]
其中,k为圆锥系数,c
i
为各项系数,roc为顶点曲率半径,顶点为自由曲面的中心点(0,0,z),r
n
为自由曲面的半口径。
[0040]
取待测自由曲面反射镜的中心为子孔径规划起点o,并作为中心子孔径的圆心,口径为d(d是夏克哈特曼出射平行光的口径);依据自由曲面面型表达式即公式(1),第二圈子孔径的中心与起点o的空间距离为r(检测口径d/2),计算第二圈子孔径中心位置(x,y,z),以及偏转角度a,旋转角度c;第三圈子孔径的中心与起点o的空间距离为2r,以此类推。子孔径规划结果如图2所示,后续可通过图2所示的子孔径规划结果,移动待测自由曲面反射镜的位置,从而获得全口径自由曲面检测的光斑位置。
[0041]
具体实施方式中,所述夏克哈特曼波扫描方法包括步骤:
[0042]
s21、将平行光束垂直入射至所述待测自由曲面反射镜的子孔径区域中心,平行光束垂直入射所述待测自由曲面反射镜的反射波前被分为多个子波前区域,每个子波前经过微透镜阵列成像在电荷耦合器件上,获得光斑位置;
[0043]
s22、按照所述子孔径规划移动所述待测自由曲面反射镜的位置,在不同位置分别按照步骤s21进行操作,获得所述全口径自由曲面检测的光斑位置。
[0044]
具体可通过夏克哈特曼波前传感器出射一束平行光束,使得平行光束垂直入射至待测自由曲面反射镜的子孔径区域中心,这样可以尽量减小反射回电荷耦合器件探测器(ccd探测器)内的波像差,并使其在夏克哈特曼波前传感器的探测范围内。通过利用夏克哈特曼原理,微透镜阵列将平行光束入射待测自由曲面反射镜的反射波前分为多个子波前区域,每个子波前经过微透镜阵列成像在位于微透镜焦面的ccd探测器上,利用质心代表实际光斑在ccd探测器上的位置,按照子孔径规划结果及扫描路径移动待测自由曲面反射镜,在每一个规划位置进行波前采样,通过子孔径拼接和全局坐标转换得到全口径自由曲面检测的光斑位置。具体的,ccd探测器探测到光斑像素点,通过求其质心代表光斑位置,进而获得光斑位置。
[0045]
具体实施方式中,根据如图2所示的待测自由曲面反射镜的子孔径规划结果,计算出待测自由曲面反射镜子孔径的空间位置(x,y,z),以及偏转倾角a和旋转角度c,在调整检测系统对准后,利用夏克哈特曼波前传感器依据规划路径逐个子孔径采样,获得每个子孔径区域的光斑位置信息。
[0046]
具体实施方式中,获得全口径自由曲面检测的光斑位置后,以理想自由曲面面型作为参考面型,根据反射定理获得光斑与微透镜阵列的对应关系,再通过逆向光线追迹方法,获得所述待测自由曲面反射镜的失高,实现对所述待测自由曲面反射镜的面形检测。具体的,自由曲面反射镜矢高的计算原理如图3所示,图中示出了夏克哈特曼扫描拼接检测理想自由曲面反射镜的子孔径光线追迹图,从a点出射的平行光i,入射到自由曲面反射镜p2(x2,y2,z2),在p2点处的自由曲面法线为n,其反射光线r经过微透镜中心p0(x0,y0,b)后,
成像在ccd上p1(x1,y1,b+f),其中微透镜阵列到子孔径中心的距离为b,微透镜焦距为f,微透镜与ccd的距离同样为f。
[0047]
具体实施方式中,根据反射定理获得光斑与微透镜阵列的对应关系包括:
[0048]
由公式(1)也可将自由曲面面型表达式写为公式(2),
[0049]
f(x,y,z)=f(x,y)
‑
z=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0050]
其中,f(x,y)为公式(1)中的z(x,y)。
[0051]
则p2(x2,y2,z2)点处的单位法向量n,
[0052][0053]
反射光线经过p2(x2,y2,z2)与微透镜中心p0(x0,y0,b),则反射光线单位方向向量r,
[0054][0055]
因为平行光沿着z轴入射,所以入射光的单位方向向量i,
[0056]
i(i
x
,i
y
,i
z
)=(0,0,
‑
1)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0057]
根据反射定理,
[0058]
r=i
‑2·
(i
·
n)n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0059]
由上式推出,
[0060][0061][0062]
由(3)与(7),可以得到方程
[0063][0064]
利用公式(1),上式为只含有未知量x2,y2的方程,可以求解出经过微透镜中心的反射光线与理想自由曲面的交点,即反射点。
[0065]
反射光线所在的直线方程可以表示为,
[0066][0067]
反射光线与ccd探测器的交点为光斑,因此p1(x1,y1,b+f)满足上式方程,求得理想自由曲面时的光斑位置。由上,得到光斑与微透镜阵列的对应关系。
[0068]
传统的夏克哈特曼检测的动态范围为单个微透镜对应的ccd探测器像素尺寸,超出动态范围则无法识别光斑与微透镜的对应关系。由于自由曲面面型更复杂,光斑会超出动态范围,而本发明提出的方法可依据理想自由曲面面型情况下的光斑位置为起点,在其附近搜索ccd探测器探测到的光斑像点,并求其质心代表光斑位置,确定了理想光斑与实际光斑的对应关系,即可直接得到实际光斑与微透镜的对应关系。
[0069]
具体实施方式中,根据已知ccd探测器上的光斑位置,获得自由曲面面型矢高的方法,如图4所示,图中示出了夏克哈特曼扫描拼接检测待测自由曲面反射镜(即实际自由曲面)的子孔径光线追迹图,依据理想自由曲面面型情况下的仿真结果,理想光斑位置为起点,在其附近搜索ccd探测器探测到的光斑像素点,并求其质心代表光斑位置p1(x1,y1,b+f),依据光斑与微透镜的对应关系,得到光斑p1(x1,y1,b+f)与微透镜阵列中心p0(x0,y0,b)是相对应的,从而求得实际反射光线方程,实际反射光线与理想自由曲面的交点p2(x2,y2,z2)的x、y坐标,可近似为实际反射光线与含有面形误差的自由曲面的交点p的x、y坐标。其中,微透镜阵列到子孔径中心的距离为b,微透镜焦距为f,微透镜与ccd探测器的距离同样为f。
[0070]
利用夏克哈特曼波前传感器依据规划路径结果逐个子孔径采样,获得每个子孔径区域的光斑位置。利用光斑与微透镜阵列的对应关系,
[0071]
则反射光线单位方向向量r
[0072][0073]
可以求出反射光线方程
[0074][0075]
实际反射光线与理想自由曲面的交点p2(x2,y2,z2)的x、y坐标,可近似为实际反射光线与含有面形误差的自由曲面的交点p的x、y坐标。
[0076]
利用反射定理
[0077][0078]
其中,
[0079][0080][0081]
通过求解方程(12),可得到自由曲面矢高z。
[0082]
通过以理想自由曲面面型作为参考面型,根据反射定理获得光斑与微透镜阵列的对应关系,再通过逆向光线追迹方法,获得所述待测自由曲面反射镜的失高后,实现了对所述待测自由曲面反射镜的初步面形检测。
[0083]
进一步优选的实施例中,可利用迭代方法,优化面型,提高面形检测的精度。即步骤s4、获得所述待测自由曲面反射镜的失高后,通过反复迭代,直至面形检测的面形精度
rms优于5nm,实现对所述待测自由曲面反射镜的面形检测。
[0084]
具体的,将计算结果自由曲面矢高z减去理想自由曲面矢高得到面形误差w,利用最小二乘法拟合面形误差,将面形误差用zernike前36项表达式进行数学解析拟合,结合理想自由曲面面型,将实际自由曲面利用数学解析式表达出来,作为新的参考面型,重新求解实际反射光线与新的参考面的交点p2(x2,y2,z2),求得的p2(x2,y2,z2)的x、y坐标更接近实际反射光线与含有面形误差的自由曲面的交点p的x、y坐标。利用反射定理,可得到更接近实际面型的自由曲面矢高z。重复以上步骤,直到满足迭代条件为止,最终,面形精度rms优于5nm。该方法可以提高检测精度,实现自由曲面反射镜的高精度检测。
[0085]
本发明具体实施方式所提供的检测光学自由曲面反射镜面形的方法,可通过计算得到光斑与微透镜阵列的对应关系,增大了检测动态范围;通过子孔径拼接的方法,提高了空间分辨率,通用性强;在恢复面型时,避免了利用斜率重构波前的计算误差;利用反射定理和迭代方法计算面型矢高,提高了面形检测的精度。
[0086]
本发明具体实施方式中还提供一种检测光学自由曲面反射镜面形的装置,所述装置包括夏克哈特曼波扫描装置,具体如图5所示,为一种实施例中夏克哈特曼扫描方法的光路结构示意图,从图中可以看出,所述夏克哈特曼波扫描装置包括激光光源1、准直镜2、分束器3、微透镜阵列4以及ccd探测器3;所述激光光源1用于产生球面波,所述球面波经过所述准直镜2变为平行光;所述平行光入射至所述分束器3发生反射,形成反射光;所述反射光垂直入射至待测自由曲面反射镜6的子孔径区域中心,形成面形信息反射光;所述面形信息反射光从所述分束器3透射,形成透射光;所述微透镜阵列4对所述透射光进行空间采样,分成若干小光束,所述若干小光束在所述ccd探测器5上分别会聚形成光斑像点。
[0087]
优选的实施方式中,检测光学自由曲面反射镜面形的装置还包括运动平台,所述运动平台用于搭载所述待测自由曲面反射镜6,并带动所述待测自由曲面反射镜6根据子孔径规划结果进行运动。具体的,所述运动包括平移、偏转和旋转。通过运动平台搭载所述待测自由曲面反射镜6运动,从而实现对所述待测自由曲面反射镜6的全口径自由曲面检测,进一步实现对所述待测自由曲面反射镜的面形检测。
[0088]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0089]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
[0090]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1