一种基于边缘计算激光雷达的屏蔽门间隙障碍物探测方法与流程
1.本发明涉及轨道交通领域,尤其涉及一种基于边缘计算激光雷达的屏蔽门间隙障碍物探测方法。
背景技术:
2.由于站台门与列车间隙的客观存在,乘客上、下车过程中存在被夹在站台门与列车车体之间从而导致人身伤害的风险。国内地铁曾发生过类似事故,给地铁正常运营带来了较大影响,也增加了运营部门的压力。目前已知导致列车晚点、临时停车、运行效率低的原因40%来自间隙中存在异物或人,大大影响行车运输效率。由于北京、上海、广州等城市新建地铁项目陆续采用了全自动无人驾驶模式,全新的运营场景对站台门与列车之间的间隙安全防护提出了更高要求。
3.传统间隙探测方式包括物理挡板、人工瞭望灯带、和光电对射探测等方式。物理挡板安装易松动易侵限,仅能探测距地面500mm内较大物体,无全区域探测能力,无探测精度。人工瞭望灯带需要依靠人为判断,有主观性,不适用于曲线站台,也不适用于全自动驾驶线路,无法联动其他系统。光电对射探测不适用于曲线站台,受强光、振动、粉尘铁屑干扰易误报,且无报警门定位功能。由于传统间隙探测方式都有相应的缺点和局限性,不能满足新运营场景中更高的间隙安全防护要求,因此如何提供一种能够满足更高安全防护要求的屏蔽门间隙障碍物探测方法,成为本领域亟待解决的技术问题。
技术实现要素:
4.本发明的目的在于提供一种基于边缘计算激光雷达的屏蔽门间隙障碍物探测方法,从而解决现有技术中存在的前述问题。
5.为了实现上述目的,本发明采用的技术方案如下:
6.一种基于边缘计算激光雷达的屏蔽门间隙障碍物探测方法,应用于基于tof的激光雷达,所述激光雷达设有边缘计算模块,所述方法包括:
7.通过所述激光雷达对环境进行扫描,采集当前探测数据;
8.通过所述边缘计算模块对所述当前探测数据进行数据处理得到当前探测边界;
9.判断所述当前探测边界是否侵入防区边界;若是,则表示防区内有障碍物,并将障碍物报警信息上传;若否,则表示防区内无障碍物;
10.其中,所述数据处理依次包括直通滤波处理、条件滤波处理、数据转换处理和统计滤波处理,以便过滤背景干扰数据。
11.优选的,所述数据处理具体包括:
12.通过预设探测角度,将超出所述预设探测角度的数据进行过滤;
13.通过预设探测半径,将超出所述预设探测半径的数据进行过滤;
14.将过滤后的有效数据转换为探测距离和探测角度的二维极坐标并存储;
15.基于所述二维极坐标,将每个数据点在多个探测周期内的平均探测距离和较相邻
数据点的变化量进行统计分析,将所述平均探测距离超过统计平均值和方差预设阈值的数据点以及所述变化量超过标准差预设阈值的数据点进行过滤。
16.优选的,所述防区边界通过以下方法获得:
17.通过所述激光雷达对无障碍物环境进行扫描,采集原始探测数据;
18.通过所述边缘计算模块对所述原始探测数据进行所述数据处理得到探测边界;
19.基于所述探测边界的数据坐标,向数据原点收缩预设安全距离得到防区边界。
20.优选的,所述激光雷达还设有无线通讯装置,通过所述无线通讯装置连接移动终端,通过所述移动终端显示探测结果和对所述激光雷达进行参数设置。
21.进一步的,所述激光雷达还设有温度传感器和姿态传感器;在所述激光雷达进行扫描前,还进行状态自检查,当任一项检查结果不符合预设标准,则发出维护提示;所述状态自检查的检查项目包括:所述温度传感器测得的温度、所述姿态传感器测得的三维姿态信息、通讯状态和存储状态。
22.进一步的,所述三维姿态信息的预设标准为所述激光雷达获取防区边界时的三维姿态信息,所述三维姿态信息包括俯仰角、左右偏侧角和竖直方向转角。
23.优选的,在判断所述当前探测边界是否侵入防区边界之前,还进行蒙尘遮挡检测,包括:
24.将距离数据原点在第一预设距离内的数据点判定为蒙尘点,若存在所述蒙尘点,则发出蒙尘提示;
25.将距离数据原点在所述第一预设距离到第二预设距离之间的数据点判定为遮挡点,若存在所述遮挡点,则发出遮挡提示;
26.其中,所述第二预设距离大于所述第一预设距离。
27.进一步的,判断所述当前探测边界是否侵入防区边界,具体包括:
28.将当前探测边界的数据坐标位于所述防区边界内且距离数据原点在第二预设距离外的数据点判定为障碍点,若存在所述障碍点,则表示当前探测边界侵入防区边界。
29.进一步的,若当前探测边界侵入防区边界时,还包括根据所述障碍点的数据信息,获取对应障碍物的形状、尺寸和位置,并进行聚类还原,以识别相应的风险等级,生成障碍物报警信息。
30.本发明的有益效果是:
31.本发明采用基于tof的激光雷达,所述激光雷达设有边缘计算模块,获取的数据在前端边缘计算进行处理,节省后端算力。当列车门与站台屏蔽门都关闭后,能够对列车门与屏蔽门间狭缝空间立面进行扫描,当防区内有障碍物存在时,激光束往返的时间将发生改变,从而可以检测并定位障碍物,可以有效检测到直径20mm障碍物物体(背包带、细绳等),最大检测精度10mm,具有定位精准,抗干扰强等特点。
附图说明
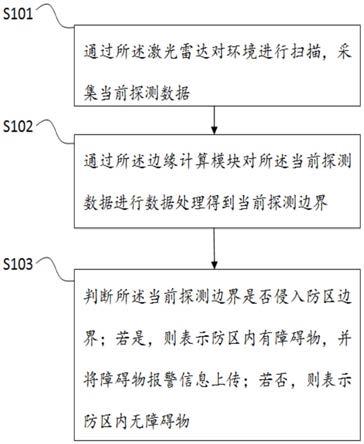
32.图1是本发明实施例中基于边缘计算激光雷达的屏蔽门间隙障碍物探测方法的流程示意图;
33.图2是本发明实施例中数据处理的流程示意图;
34.图3是本发明实施例中直通滤波的示意图;
35.图4是本发明实施例中条件滤波的示意图;
36.图5是本发明实施例中滤波后的数据范围示意图。
具体实施方式
37.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
38.如图1所示,本发明提供了一种基于边缘计算激光雷达的屏蔽门间隙障碍物探测方法,应用于基于tof的激光雷达,所述激光雷达设有边缘计算模块,所述方法包括:
39.s101,通过所述激光雷达对环境进行扫描,采集当前探测数据。
40.s102,通过所述边缘计算模块对所述当前探测数据进行数据处理得到当前探测边界。
41.s103,判断所述当前探测边界是否侵入防区边界;若是,则表示防区内有障碍物,并将障碍物报警信息上传;若否,则表示防区内无障碍物。
42.其中,所述数据处理依次包括直通滤波处理、条件滤波处理、数据转换处理和统计滤波处理,以便过滤背景干扰数据。
43.本实施例中,激光雷达收发一体,采用905nm波长光束,最适宜在空气中传播,单个激光雷达探测半径为7000mm,探测角度为100
°
。每组激光雷达能覆盖对应滑动门及固定门,具有探测区域防区自学习功能,可设定任意轮廓的探测区域。采用边缘计算技术无需将雷达数据传输至上位机,可直接对探测的结果进行判断,不同车况(满载、空载)、不同站台间隙(直线站台、曲线站台)对探测光幕无影响,可以有效检测到直径20mm障碍物物体(背包带、细绳等),探测精度10
‑
20mm。
44.本实施例中,边缘计算模块负责对激光探测器的数据进行滤波、转换、过滤背景干扰数据;去除不稳定的点位数据、稳定频繁跳动的数据。如图2所示,所述数据处理具体包括:
45.s201,通过预设探测角度,将超出所述预设探测角度的数据进行过滤。
46.s202,通过预设探测半径,将超出所述预设探测半径的数据进行过滤。
47.s203,将过滤后的有效数据转换为探测距离和探测角度的二维极坐标并存储。
48.s204,基于所述二维极坐标,将每个数据点在多个探测周期内的平均探测距离和较相邻数据点的变化量进行统计分析,将所述平均探测距离超过统计平均值和方差预设阈值的数据点以及所述变化量超过标准差预设阈值的数据点进行过滤。
49.本实施例中,对于激光雷达源数据的滤波分为两步,如图3所示,第一步采用直通滤波法,通过划定探测起止角度α
‑
β,对超过起止角度范围的数据进行过滤,只向后传递α
‑
β角度范围内的探测数据。
50.如图4所示,第二步采用条件滤波法,通过划定探测半径l,将超出所述预设探测半径的数据进行过滤,具体操作为对飞行时间超过2l/c时间的数据进行过滤(c:光速)。
51.如图5所示,在两步滤波后,有效数据范围缩小,有效减少下一步计算量。
52.将过滤后的有效数据根据飞行时间测量计算,转换为对应的探测距离(该数据点位到激光雷达的距离),计算公式为l1=δt*c/2(δt:激光脉冲往返时间,c:光速,l1:第1测
点目标距离)。并将该探测距离与探测角度结合形成二维极坐标,将一个探测周期的所有有效坐标进行存储。
53.存储数据表单如表1所示。
54.表1
55.序号角度距离光强度1α1l1l12α2l2l2
…ꢀꢀꢀ
56.其中,还可以将数据点位对应的光强度与数据点坐标同时保存,并且将光强度小于设定值(如3%)的背景环境干扰测点进行过滤。
57.最后通过统计滤波,对每个测点多个周期的平均距离及相邻测点的变化量进行统计分析,对在平均距离在统计平均值及方差标准之外的点判定为不稳定点,对相邻测点变化量标准差变化大的点位和上述不稳定点进行去除。
58.本实施例中,当激光雷达处于正常工作环境中,等待上位机提供的自学习指令,对设备当前探测边界进行学习形成防区。具体的,所述防区边界通过以下方法获得:
59.通过所述激光雷达对无障碍物环境进行扫描,采集原始探测数据。
60.通过所述边缘计算模块对所述原始探测数据进行所述数据处理得到探测边界。
61.基于所述探测边界的数据坐标,向数据原点收缩预设安全距离得到防区边界。
62.本实施例中,所述激光雷达可通过冗余的can总线进行连接,支持与信号、站台门、视频系统联动。还可设有无线通讯装置,通过所述无线通讯装置连接移动终端,通过所述移动终端显示探测结果和对所述激光雷达进行参数设置。具体的,通过手持平板连接激光雷达热点,可以使用专用app进行报警灵敏度、探测距离、雷达开角等参数设置,激光雷达自学习的防区边界及当前探测边界的探测图形都可以在手持平板上直观的看到。
63.本实施例中,所述激光雷达还设有温度传感器和姿态传感器;在所述激光雷达进行扫描前,还进行状态自检查,当任一项检查结果不符合预设标准,则发出维护提示;所述状态自检查的检查项目包括:所述温度传感器测得的温度、所述姿态传感器测得的三维姿态信息、通讯状态和存储状态。其中,所述三维姿态信息的预设标准为所述激光雷达获取防区边界时的三维姿态信息,所述三维姿态信息包括pitch俯仰角、roll左右偏侧角和yaw竖直方向转角。
64.本实施例中,激光雷达上电开始,执行设备自检,对设备元器件工作状态、温度、存储空间预置数据、通讯状态等分模块进行检测。若间隙探测雷达自检过程中发现元器件无响应、温度异常、存储空间预置数据错误、通讯中断等情况,综合判断设备故障状态,并上报上位机。上位机根据设备故障情况进行重启、维修、更换等操作。当激光雷达自检正常时,才进行障碍物探测定位。
65.在具体实施场景中,激光雷达采用复合传感感知技术路线,集探测感知、松动偏转、蒙尘、遮挡于一体,内置mems姿态传感器,当检测到设备前后倾斜、左右倾斜角度超过3度,上下偏移20mm,系统提示设备相关报警。激光雷达内置温度传感器,当检测到雷达核心部件或电路元件温度异常时,及时给与系统维护提示。激光雷达还支持自我诊断蒙尘检测,在镜头污染或脏物积累超出定位公差的情况下,探测系统能发出维护警报信号,不因此输
出障碍物检测误报警。
66.在本技术的一些实施例中,蒙尘遮挡检测具体包括:
67.将距离数据原点在第一预设距离内的数据点判定为蒙尘点,若存在所述蒙尘点,则发出蒙尘提示;
68.将距离数据原点在所述第一预设距离到第二预设距离之间的数据点判定为遮挡点,若存在所述遮挡点,则发出遮挡提示;
69.其中,所述第二预设距离大于所述第一预设距离。
70.若激光雷达处于蒙尘、遮挡等异常的外部工作环境中,及时通知上位机程序,提示人工维护故障处置。只要当激光雷达处于正常工作环境中,才进行障碍物探测定位。通常第一预设距离为10cm,第二预设距离为50cm,还可根据实际应用场景具体设置。
71.本实施例中,判断所述当前探测边界是否侵入防区边界,具体包括:
72.将当前探测边界的数据坐标位于所述防区边界内且距离数据原点在第二预设距离外的数据点判定为障碍点,若存在所述障碍点,则表示当前探测边界侵入防区边界。
73.本实施例中,若防区内无障碍物,则持续探测分析至探测倒计时结束;若防区内有障碍物,将障碍物报警信息上传至上位机。该探测结果可通过移动终端的app直观的看到障碍物侵限及侵入位置。同时激光雷达的边缘计算模块可根据对探测物的扫描,探测障碍物的形状、尺寸、被夹的位置等信息,对被扫描物进行聚类分析,达到精准判断被夹物品的种类,判断被夹到的异物风险等级,可有效滤除蚊虫、地面垃圾等异物保证车辆运行效率。
74.通过采用本发明公开的上述技术方案,得到了如下有益的效果:
75.本发明采用基于tof的激光雷达,ip67防护等级,安装不侵限;区域激光光幕扇面扫描探测,可实现站台门与车门间隙全覆盖;探测精度10
‑
20mm,可精准定位。激光雷达前端嵌入式边缘计算模块,通过前端稳定算法,可不依靠后端控制器独立完成防区学习及去背景干扰功能,同时可直接对站台门与车门中间间隙内夹人夹物情况进行判断。激光雷达收发一体,抗振动干扰,调试便捷;采用905nm波长光束,抗强光干扰;支持蒙尘、遮挡检测报警;支持与信号、站台门、视频系统联动;双路can总线,支持多门100%并发报警,支持单门故障隔离、整侧站台紧急旁路。本发明提供的方法环境适用性强(可适用室内、室外、直线、曲线、半高、全高站台以及全自动驾驶线路)。
76.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1