一种单星辐射源无源监测目标运动属性判别方法与流程
1.本发明属于信号检测技术领域,特别是涉及一种单星辐射源无源监测目标运动属性判别方法。
背景技术:
2.利用信号监测和定位系统对卫星通信信号进行全面监视,是辐射源(目标)态势监视和卫星通信系统运维的基础。随着卫星通信系统越来越广泛的应用于重要各行各业,对目标信号监视、定位和运动属性判别,可为目标威胁评估和下一步行动决策形成支撑。
3.目前,目标运动属性判别往往附着于无源双星定位和三星定位系统,利用定位系统产生的时差、位置等信息,判别目标是运动或静止状态。在卫星信号监测和定位领域,卫星信号辐射源运动属性判别的主流方法是:(1)依托双星时频差定位系统多次测量的时差、频差,通过基于静止假设的拟合度检验和rao检验方法,判决目标是运动或静止状态;(2)依托三星定位系统,在静止假设下,利用双星时频差定位结果和三星双时差定位结果应该相匹配的原理,基于定位结果一致性进行目标运动属性检测。
4.现有方法,需要具备对信号辐射源进行双星或三星定位的条件,这极大的限制了其使用范围。同时,现有方法只能对目标进行运动和静止状态判别,无法提供诸如目标机动、高速运动等更加丰富的运动属性。
5.当前广泛存在的单星信号监测系统可对大量的信号进行监测,但是缺少判明目标运动属性的方法。
技术实现要素:
6.为了解决上述问题,本发明提出了一种单星辐射源无源监测目标运动属性判别方法,只需要单星信号接收条件即可,进行信号频率测量,基于频率变化情况,判别目标的静止或运动、是否机动、是否高速运动等运动属性,进行目标运动属性判别,适用条件更简单、判别属性种类更多。
7.为达到上述目的,本发明采用的技术方案是:一种单星辐射源无源监测目标运动属性判别方法,包括步骤:
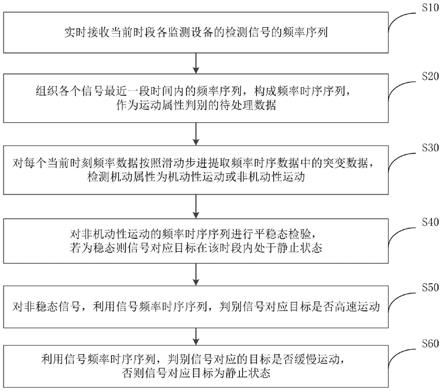
8.s10,实时接收当前时段各监测设备的检测信号的频率序列;
9.s20,组织各个信号最近一段时间内的频率序列,构成频率时序序列,作为运动属性判别的待处理数据;
10.s30,对每个当前时刻频率数据按照滑动步进提取频率时序数据中的突变数据,检测机动属性为机动性运动或非机动性运动;
11.s40,对非机动性运动的频率时序序列进行平稳态检验,若为稳态则信号对应目标在该时段内处于静止状态;
12.s50,对非稳态信号,利用信号频率时序序列,判别信号对应目标是否高速运动;
13.s60,对步骤s50中判定不是高速运动的信号,利用信号频率时序序列,判别信号对
应的目标是否缓慢运动,否则信号对应目标为静止状态。
14.进一步的是,在所述步骤s10中,接收并缓存卫星通信信号监测设备实时输出的监测结果,加入到各信号对应的监测结果频率时序队列中,并从中剔除信噪比小于信噪比门限的监测结果。
15.进一步的是,在所述步骤s20中,对每个信号提取最近一段时间内的频率序列组织构成频率时序序列s=[s0,s
t
]的监测结果,s0为数据关联起始时刻频率数据,s
t
为当前时刻频率数据;
[0016]
并对s序列进行卷积平滑滤波处理得到平滑的频率时序序列。
[0017]
进一步的是,在所述步骤s30中,对每个当前时刻频率数据按照滑动步进提取频率时序数据中的突变数据,检测机动属性为机动性运动或非机动性运动,包括步骤:
[0018]
对每个频率时序数据,按照滑动步进t
step
,提取数据中的突变数据;
[0019]
对频率时序数据做差分运算;
[0020]
对差分时间序列做异常值检验:对于样本数据取值概率分布在(μ-nσ,μ+nσ)之间之外的可以判定为目标在进行机动运动;
[0021][0022]
满足上述检验条件的频率时序数据,即可判定为在时刻t,目标在执行机动性运动;不满足突变检验条件的数据,则判断为非机动性运动。
[0023]
进一步的是,在所述步骤s40中,对非机动性运动的频率时序序列进行平稳态检验,若为稳态则信号对应目标在该时段内处于静止状态,包括步骤:
[0024]
使用adf检验模型,检验时段内序列是否存在单位根:
[0025]
将时序频率数据做回归分析,选取拟合度最好的检验模型,根据判断条件确定数据是否满足平稳态要求。
[0026]
进一步的是,在步骤s50中,对非稳态信号,利用信号频率时序序列,判别信号对应目标是否高速运动,包括步骤:
[0027]
计算[s0,s
t
]内极值变化幅度s
extreme
;
[0028]
如果变化幅度,则认为目标在进行高速运动,是极差门限。
[0029]
进一步的是,在步骤s60中,对步骤s50中判定不是高速运动的信号,利用信号频率时序序列,判别信号对应的目标是否缓慢运动,否则信号对应目标为静止状态,包括步骤:
[0030]
对于未通过步骤s50的频率时序数据[s0,s
t
]进行直线拟合,获得直线斜率ω;
[0031]
如果ω超过缓速运动斜率阈值ω
slow
,则认为目标缓速运动状态,否则认为目标处于静止状态。
[0032]
采用本技术方案的有益效果:
[0033]
传统的卫星信号(目标)运动属性判别方法需要依赖双星时频差定位系统或三星双时差定位系统。本发明只需要单星信号接收条件即可,进行信号频率测量,基于频率变化情况,判别目标的静止或运动、是否机动、是否高速运动等运动属性。相比之下,本方法适用条件更简单、判别属性种类更多,可广泛应用于现有的卫星信号监测系统、双星时频差定位
系统和三星双时差定位系统中,进行目标运动属性判别。
[0034]
本发明接入卫星信号监测系统的监测结果,只需要从各信号的频率序列中提取其变化信息,据此判别目标是否运动、是否机动、是否高速运动。本发明不依赖于条件相对苛刻的多星定位系统,可嵌入到广泛存在的卫星信号监测系统中,适用面广、发挥作用空间大。本发明利用广泛存在的卫星信号监测系统的输出结果,而不是利用多星定位系统的时频差,具有更广阔的适用场景。同时,本发明不仅判别目标是否运动,还进一步结合判别目标是否机动、是否高速运动等,为细化刻画目标和目标威胁评估提供了更好的依据。
附图说明
[0035]
图1为本发明的一种单星辐射源无源监测目标运动属性判别方法流程示意图;
[0036]
图2为本发明实施例中运动属性判别场景示意图;
[0037]
图3为本发明具体优化实施例中单星辐射源无源监测目标运动属性判别方法流程示意图。
具体实施方式
[0038]
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明作进一步阐述。
[0039]
在本实施例中,参见图1和2所示,本发明提出了一种单星辐射源无源监测目标运动属性判别方法,包括步骤:
[0040]
s10,实时接收当前时段各监测设备的检测信号的频率序列;
[0041]
s20,组织各个信号最近一段时间内的频率序列,构成频率时序序列,作为运动属性判别的待处理数据;
[0042]
s30,对每个当前时刻频率数据按照滑动步进提取频率时序数据中的突变数据,检测机动属性为机动性运动或非机动性运动;
[0043]
s40,对非机动性运动的频率时序序列进行平稳态检验,若为稳态则信号对应目标在该时段内处于静止状态;
[0044]
s50,对非稳态信号,利用信号频率时序序列,判别信号对应目标是否高速运动;
[0045]
s60,对步骤s50中判定不是高速运动的信号,利用信号频率时序序列,判别信号对应的目标是否缓慢运动,否则信号对应目标为静止状态。
[0046]
作为上述实施例的优化方案,如图3所示,在所述步骤s10中,接收并缓存卫星通信信号监测设备实时输出的监测结果,加入到各信号对应的监测结果频率时序队列中,并从中剔除信噪比小于信噪比门限的监测结果;监测结果包括监测信号编号id、射频频率freq、信噪比snr。
[0047]
作为上述实施例的优化方案,如图3所示,在所述步骤s20中,对每个信号提取最近一段时间内的频率序列组织构成频率时序序列s=[s0,s
t
]的监测结果,s0为数据关联起始时刻频率数据,s
t
为当前时刻频率数据;
[0048]
并对s序列进行卷积平滑滤波处理得到平滑的频率时序序列;
[0049]
对s序列进行卷积平滑滤波处理公式为:
[0050]
其中2w+1表示卷积窗口长度,s
k+i
对应的k+i时刻的待判别频率数据。
[0051]
作为上述实施例的优化方案,如图3所示,在所述步骤s30中,对每个当前时刻频率数据按照滑动步进提取频率时序数据中的突变数据,检测机动属性为机动性运动或非机动性运动,包括步骤:
[0052]
当目标做机动性运动时,其频率数据具有突变特征。据此,对每个频率时序数据s
t
∈s,按照滑动步进t
step
,t
step
为可根据具体数据特征调整,提取数据中的突变数据;
[0053]
对频率时序数据做差分运算:
[0054]
对差分时间序列做异常值检验,采用n-sigma异常值检验,其中n可根据具体数据特征调整,用以检测差分数据发生突变:
[0055]
对于样本数据取值概率分布在(μ-nσ,μ+nσ)之间之外的可以判定为目标在进行机动运动,即满足突增条件或突减条件:
[0056]
检验突增:
[0057]
检验突减:
[0058]
其中:
[0059][0060]
满足上述任一检验条件的频率时序数据即可判定为在时刻t,目标在执行机动性运动;不满足突变检验条件的数据,则判断为非机动性运动。
[0061]
作为上述实施例的优化方案,如图3所示,在所述步骤s40中,对非机动性运动的频率时序序列进行平稳态检验,若为稳态则信号对应目标在该时段内处于静止状态,包括步骤:
[0062]
使用adf检验模型,检验时段内序列是否存在单位根:
[0063]
将时序频率数据分别代入公式1、2和3中,做回归分析,选取拟合度最好的检验模型(相关系数r值最大,置信值p值最大,r2最接近1),求得σ的估值,做假设检验,根据判断条件确定数据是否满足平稳态要求;
[0064]
公式1:
[0065]
公式2:
[0066]
公式3:
[0067]
判断条件:
[0068]
h(0):σ=0原序列存在单位根,为非平稳序列;
[0069]
h(1):σ《0原序列不存在单位根,为平稳序列;
[0070]
其中,m表示步长,最优步长可由赤池信息准则获取;∈
t
表示t时刻的白噪声,α为时序常数项,β为时间系数,γ为自回归系数,σ为假设检验统计量。
[0071]
作为上述实施例的优化方案,如图3所示,在步骤s50中,对非稳态信号,利用信号频率时序序列,判别信号对应目标是否高速运动,包括步骤:
[0072]
计算[s0,s
t
]内极值变化幅度s
extreme
,变化幅度计算公式为:
[0073]sextreme
=max([s0,s
t
])-min([s0,s
t
)]);
[0074]
如果变化幅度则认为目标在进行高速运动,是极差门限,可根据目标特性,调整门限值,以达到最好的判别效果。
[0075]
作为上述实施例的优化方案,如图3所示,在步骤s60中,对步骤s50中判定不是高速运动的信号,利用信号频率时序序列,判别信号对应的目标是否缓慢运动,否则信号对应目标为静止状态,包括步骤:
[0076]
对于未通过步骤s50的频率时序数据[s0,s
t
]进行直线拟合,其中直线的斜率可以用以下公式求得:
[0077][0078][0079]
其中,ti表示时间序列的第i个时刻;即时间均值;si表示第i个频率值;即频率均值;b表示直线截距;ω表示直线斜率;
[0080]
如果ω超过缓速运动斜率阈值ω
slow
,则认为目标缓速运动状态,否则认为目标处于静止状态;根据目标特性,调整门限值,以达到最好的判别效果。
[0081]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1