一种航空精细大场景制作与量测方法与流程
1.本发明属于勘察测绘技术领域,具体涉及一种航空精细大场景制作与量测方法。
背景技术:
2.对真实场景的三维重建量测技术一直是测绘、地勘、计算机视觉等基础学科研究的热点技术之一,其采集重建的实景感知数据在民用和军事领域中一直推动着更高层技术应用的发展,带来的经济与社会价值巨大。
3.传统的三维立体大场景的获取方式主要包括:1)使用立体核线像对切换显示的模式;2)使用三维纹理模式;3)使用dsm+dom 2.5维模式。然而立体核线模式受限于像幅小的先天不足,在查看测区的立体场景时存在大量的立体双片切换过程,不能形成无缝链接的大场景漫游效果;使用三维纹理模式的场景应用范围大,得益于pagedlod技术的加持可以实现超大场景的真实场景展示效果,但这种方式易受到影像质量、成像环境、匹配精度、弱纹理等因素的影响,使得三维真实场景存在纹理扭曲、几何变形等严重问题,影响了对真实场景的判读,不适合地质勘测与现状调查等工作,另外其需要大量的重建运算;使用2.5维度方式只能展示高程竖直方向的地形起伏,不能反应真实场景的三维形态。
4.【专利cn200310111231.1】提出使用数字立体正射影像镶嵌的可量测无缝空间立体生成方法,使用非线性投影方式引入视差,但未考虑上下视差的改正,立体成像使用各自的基线参数容易产生空间错位,立体拼接线生成方法操作性差;【专利cn201010114571x】通过在倾斜光束的基础上进行位置改正代替了【专利cn200310111230.7】前方交会的模式,但此方法在真实情况下无法完全改正上下视差的影响,且精度相对于原片前方交会模式是有损失的。现有方法都没有系统地提出立体量测所需要考虑的问题,如上下视差消除、相机畸变改正、拼接线生成方法的便捷性等。
技术实现要素:
5.为了弥补现有技术的不足,本发明提供一种航空精细大场景制作与量测方法,统一航空大飞机与无人机数据,弥补现有大场景生成算法遗漏的问题和体系不完备性的问题。
6.为了实现上述目的,本发明所采用的技术方案为:
7.1.一种航空精细大场景制作与量测方法,包括如下步骤:
8.步骤一:根据需求获取航空遥感数据;
9.步骤二:通过航空影像空三解算,获得每张影像的姿态pos数据;
10.步骤三:生成低分辨率的dsm数据;
11.步骤四:对航空影像数据做匀色匀光处理;
12.步骤五:根据dsm数据和姿态pos数据,使用数字微分纠正生成每一个影像的地理正射影像;
13.步骤六:根据每一张影像的姿态pos数据,空间检索查找最佳匹配对,并记录每一
对立体影像对的空间重叠区;
14.步骤七:对上层影像及下层影像单独进行拼接线编辑工作,并把编辑工作约束在各自的立体影像重叠区内;
15.步骤八:统计每一个影像对基线方向,如与指定参考方向相差≥90
°
,则交换左影像与右影像的角色;
16.步骤九:根据上层影像,设置地面分辨率,通过影像微分纠正生成大场景左影像;
17.步骤十:引入视差函数,将每一对立体像对的二维视差改正到地理坐标上,一同参与下层右影像的数字微分纠正过程,即生成大场景右影像;
18.步骤十一:对生成的大场景左影像与大场景右影像进行立体量测,获得地理信息数据库。
19.具体地,步骤十中,所述视差函数为:
[0020][0021]
其中,q为视差,z0为平均影像摄影高度值,h为平均航高,z为地面高度,b为平均基线长度或参考长度。
[0022]
本发明的有益效果:
[0023]
1)本发明实现了一种高效的大场景立体三维生成方法,相对于现有的立体大场景生成方法,更具有通用性、精度更高、可工程操作性更强,立体测量精度不受dsm的影响;
[0024]
2)本发明大大缩减了地理三维信息获取的时间,降低了在应用领域的成本投入;
[0025]
3)本发明不受传统上下视差的影响,而且测量精度等效于原始影像的前方交会精度,因此在数据生产规范中无需单独设立立体大场景数据采集规范,空三精度与普通航空测图规范一致;
[0026]
4)本发明方法直接建立在统一的、开放性的空三数据协议之上,兼容各种产品的航空影像数据,然后引入二维视差,立体像对的拼接线生成过程更具有易于操作性的特点,同时不受上下视差残留的影响,立体量测的精度等效于原始影像的前方交会的效果,且同名点到三维物方点的量测过程完全高效自动化实时完成。
附图说明
[0027]
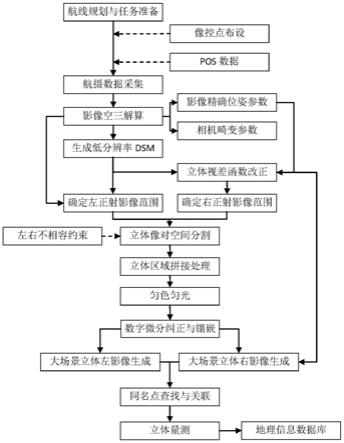
图1为本发明操作流程图;
[0028]
图2为左右不相容原理图;
[0029]
图3为立体拼接线图;
[0030]
图4为立体测图原理图。
具体实施方式
[0031]
下面结合具体实施方式对本发明进行详细的说明。
[0032]
如图1所示,本发明包括如下步骤:
[0033]
步骤一:根据需求获取航空遥感数据,在摄取数据的时候得按照相关测图规范要求,满足测区覆盖区域内航向2度重叠和旁向3度重叠的要求;
[0034]
步骤二:通过航空影像空三解算,获得每张影像的姿态pos数据,即外方位元素m=
[rt]3×4和内方位元素k3×3,以及传感器的畸变参数d与平台位置改正参数s=[r`t`]3×4,形成公式1的物方x和像方x的映射关系,其中列向量经过齐次化处理。
[0035]
x=dskmx=px
ꢀꢀꢀ
(公式1)
[0036]
步骤三:生成低分辨率的dsm数据,主要用于与测区范围内的真实立体光束测线相交;
[0037]
步骤四:对航空影像数据做匀色匀光处理,使得重叠部分整体色调、色彩一致;
[0038]
步骤五:根据dsm数据和姿态pos数据,使用数字微分纠正生成每一个影像的地理正射影像,即公式1的间接过程;
[0039]
步骤六:根据每一张影像的姿态pos数据,空间检索查找最佳匹配对,可按照重叠面积、距离参数,组成空间初始匹配对。然后把立体匹配像对,左影像放置在上层,右影像放置在下层,如图2所示。另外初始状态下约束其任意一张影像不能同时出现在上下层影像中。并记录每一对立体影像对的空间重叠区。
[0040]
步骤七:根据步骤六的结果,上层影像可以单独进行拼接线编辑工作,并把编辑工作约束在各自的立体影像重叠区内,如图3所示,每一个区域对应一个立体像对;
[0041]
同理下层影像也可单独实现拼接线编辑工作;立体像对间的拼接线不必同时满足避障等约束,简化了真实大场景作业难度;
[0042]
步骤八:统计每一个影像对基线方向,如与指定参考方向相差≥90
°
,则交换左影像与右影像的角色;
[0043]
步骤九:根据上层影像,设置地面分辨率,通过影像微分纠正生成大场景左影像;
[0044]
在拼接线处进行数字微分纠正时,需要多覆盖1个左右像素的过渡区,用于不同影像源的镶嵌和浮点处理;
[0045]
步骤十:引入视差函数,将每一对立体像对的二维视差改正到地理坐标上,一同参与下层右影像的数字微分纠正过程,即生成大场景右影像;
[0046]
1)对大场景右影像的生成需要加入视差函数,以达到立体效果;
[0047]
视差函数如公式2所示,q为视差,z0为平均影像摄影高度值,h为平均航高,z为地面高度,b为平均基线长度或者为参考长度,统一基线长度、航高、摄影高度可以使得相邻影像在重叠区不会产生几何错位。
[0048][0049]
2)改正视差偏差。
[0050]
由于每一对立体像对的基线方向α与平均基准β方向有偏差,导致立体视觉的撕裂,因此使用公式3进行改正,把原始的一维视差变为二维的地理位移。
[0051][0052]
3)通过步骤2),把二维视差改正到地理坐标上,如公式4,一同参与下层右影像的数字微分纠正过程,随即生成大场景右影像;其中二维地理视差需要做齐次处理。
[0053][0054]
由于大场景需要合成大像幅影像,在立体加载现实过程中受限于硬件,因此需要
对其进行建立金字塔,方便绘制窗口的实时瓦片式调用。另外在测图现实过程中,需要对立体大场景左右影像进行旋转β角度,以达到视觉基线与平均基线方向一致。
[0055]
步骤十一:对生成的大场景左影像与大场景右影像进行立体量测,获得地理信息数据库。
[0056]
在立体测图操作中,可位移大场景右影像,如图4所示,使得形成最佳立体视觉,通过光标刺同名点自动返回三维点坐标。立体量测的本质是同名点前方交会,但是通过巧妙地设计,在不增加额外存储的前提下实现实时量测,具体立体量测公式如公式5所示。其中xl、xr为左右影像的同名点,z为x的高程分量,x为具有三个未知量待定值,4个有效等式可解。公式5中暗含了与dsm无关的特性,消除了原始人工视差的影响。
[0057][0058]
实施例:
[0059]
某测区覆盖影像数量为69张,分辨率为2cm,某测区为条带分布,地势平坦,平均摄影高度为100米,使用本发明方法生成左右大场景立体模型展示,并进行量测,平面精度可以达到2个地面分辨率,高程精度可以达到3个地面分辨率。但其在生成大场景的过程中除空三解算外,其余的最耗费算力的是数字微分纠正,总体消耗时间的上限为2倍的dom制作时间。然而与三维重建消耗的算力相比,本技术提供的三维感知所需时间成本明显得到极大的降低。
[0060]
本发明的内容不限于实施例所列举,本领域普通技术人员通过阅读本发明说明书而对本发明技术方案采取的任何等效的变换,均为本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1