一种毫米波雷达的收发系统的制作方法
1.本实用新型涉及射频通信技术领域,尤其涉及一种毫米波雷达的收发系统。
背景技术:
2.机场跑道上的外来物(foreign object debris,fod)对于跑道上起降的飞机是一种非常严重的威胁。许多案例都证明,机场道面上的外来物可以很容易被吸入到发动机,导致叶片及其他部件损伤,碎片也会堆积在机械装置中,影响起落架、机翼等设备的正常运行,不仅会损坏飞机和夺去宝贵的生命,而且还伴随着巨大的经济损失,因此需要通过fod探测车对机场跑道上的外来物进行实时探测,保证飞机运行的安全性。
3.机场fod探测车工作时需要实时高精度定位信息以解算跑道fod位置。目前对移动平台的高精度定位方式包括gnss(差分gps、北斗等),塔康(tacon),激光雷达(slam)三种方式。其中gnss较成熟,作为fod探测车主设备,但野战环境容易被干扰,军用fod探测车要在无gnss情况下正常使用;tacon方式只能引导空中移动平台,在地面上无法使用;slam方式问题在于作用距离较短(一百米左右)导致无法适应较高的车速,野外使用气候影响非常大导致视觉匹配精度受限。
4.更进一步地,为实现fod探测车的定位,可通过多台毫米波雷达探测其自身与fod的距离,即雷达发射端发射探测信号,经fod探测车进行接收后发射至雷达接收端;进一步解算多台毫米波雷达与fod探测车的距离关系,进而实现对fod探测车的多维精准定位,此种方式不受天气等因素的影响,且定位精度、定位范围相较于上述定位方式更具有优势。在实施该定位方式中,接收端对信号进行解调恢复是影响整个系统定位精度的关键指标,因此,一种能够使接收端实现无相位模糊的信号解调的发明就显得很有必要。
技术实现要素:
5.本实用新型的目的在于克服现有雷达接收端无法实现无相位模糊的信号解调的问题,提供了一种毫米波雷达的收发系统。
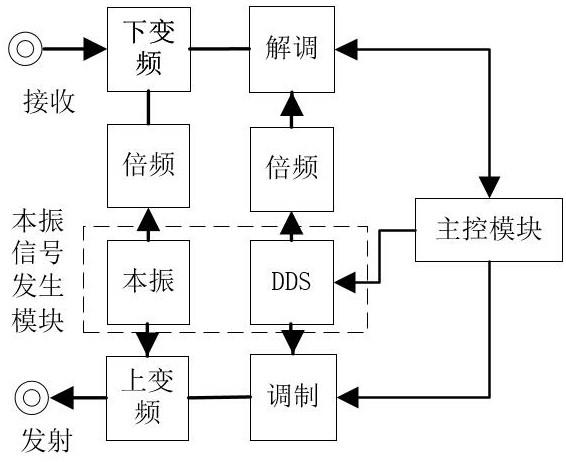
6.本实用新型的目的是通过以下技术方案来实现的:一种毫米波雷达的收发系统,系统具体包括主控模块、qpsk调制模块、上变频模块、本振信号发生模块、下变频模块和bpsk解调模块,主控模块与qpsk调制模块、bpsk解调模块、本振信号发生模块连接,本振信号发生模块与上变频模块、下变频模块、qpsk调制模块、bpsk解调模块连接,qpsk制模块输出端与上变频模块连接,下变频模块与bpsk解调模块连接;
7.所述bpsk解调模块包括iq混频器、功分器、模数转换器和加法器,iq混频器的两个输出端均与功分器连接,两个功分器一路输出端均与模数转换器连接,两个功分器另一路输出端均与加法器连接,模数转换器、加法器与主控模块连接,主控模块经本振信号发生模块与iq混频器连接。
8.作为一选项,所述主控模块经本振信号发生模块、第四倍频器与iq混频器连接。
9.作为一选项,所述iq混频器两路输出端分别经第六滤波器、第七滤波器与功分器
连接。
10.作为一选项,所述主控模块为fpga、单片机中的任意一种。
11.作为一选项,所述本振信号发生模块包括第一本振信号发生模块和第二本振信号发生模块,第一本振信号发生模块包括第一本振信号发生子模块和第二本振信号发生子模块,或第一本振信号发生模块包括第一本振信号发生子模块、第二本振信号发生子模块、第三本振信号发生子模块和第四本振信号发生子模块。
12.作为一选项,所述本振信号发生子模块为dds频率合成器或晶体振荡器或锁相环电路。
13.作为一选项,所述qpsk调制模块包括顺次连接的电压比较器、正交调制器,电压比较器与主控模块连接,本振信号发生模块与正交调制器输入端连接,正交调制器输出端与上变频模块连接。
14.作为一选项,所述上变频模块包括顺利连接的第一混频器、第一滤波器、第二混频器、第二滤波器和第一放大器,第一本振信号发生子模块输出端与第一混频器连接,第二本振信号发生子模块输出端与第二混频器连接。
15.作为一选项,所述下变频模块包括顺次连接的第二放大器、第三混频器、第三滤波器和第四混频器,第一本振信号发生子模块经第一倍频器与第三混频器连接,第二本振信号发生子模块经第二倍频器与第四混频器连接。
16.作为一选项,将第一本振信号发生子模块与第一倍频器整体替换为第三本振信号发生子模块,第三本振信号发生子模块输出端与第三混频器连接;将第二本振信号发生子模块与第二倍频器整体替换为第四混频器,第四本振信号发生子模块输出端与第四混频器连接。
17.需要进一步说明的是,上述系统各选项对应的技术特征可以相互组合或替换构成新的技术方案。
18.与现有技术相比,本实用新型有益效果是:
19.本实用新型bpsk解调模块采用加法器对iq混频器输出的i路、q路信号进行解调处理,使bpsk解调模块输出值在0度,能够消除现有costas环路中采用乘法器造成的90
°
相位模糊,对接收信号进行360
°
无模糊同步,保证了对fod探测车的定位精准性。
附图说明
20.下面结合附图对本实用新型的具体实施方式作进一步详细的说明,此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,在这些附图中使用相同的参考标号来表示相同或相似的部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。
21.图1为本实用新型实施例1中雷达测距的系统框图;
22.图2为本实用新型实施例1中解调模块原理框图;
23.图3为本实用新型实施例1中雷达与反射器之间的信号收发框图;
24.图4为本实用新型实施例1中3台雷达对fod探测车进行定位的机制示意图;
25.图5为本实用新型实施例1中倍频回传模块原理框图;
26.图6为本实用新型实施例1中调制模块原理框图;
27.图7为本实用新型实施例1中上变频模块原理框图;
28.图8为本实用新型实施例1中下变频模块原理框图。
具体实施方式
29.下面结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.在本实用新型的描述中,需要说明的是,属于“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方向或位置关系为基于附图所述方向或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,属于“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
31.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,属于“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
32.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
33.实施例1
34.如图1
‑
2所示,在实施例1中,一种毫米波雷达的收发系统,具体包括主控模块、qpsk调制模块、上变频模块、本振信号发生模块、下变频模块和bpsk解调模块,主控模块与qpsk调制模块、bpsk解调模块、本振信号发生模块连接,本振信号发生模块与上变频模块、下变频模块、qpsk调制模块、bpsk解调模块连接,qpsk制模块输出端与上变频模块连接,下变频模块与bpsk解调模块连接;bpsk解调模块包括iq混频器、功分器、模数转换器和加法器,iq混频器的两个输出端均与功分器连接,两个功分器一路输出端均与模数转换器连接,两个功分器另一路输出端均与加法器连接,模数转换器、加法器与主控模块连接,主控模块经本振信号发生模块与iq混频器连接。
35.具体地,主控模块产生基带信号,本振信号发生模块产生调制本振信号,调制模块根据该基带信号、调制本振信号进行调制得到一中频信号,该中频信号经上变频模块进行变频处理变成射频探测信号并发射;接收端接收到经反射器反射的射频探测信号后,经下变频模块进行变频处理得到中频探测信号,bpsk解调模块继续对该中频信号进行解调,即通过两个功分器将iq混频器输出的i路、q路信号分为两路信号,以将i路、q路信号分别输入至模数转换器、加法器,模数转换器与主控模块连接,以使主控模块对vi、vq值进行采样,加法器对vi、vq做加法、减法计算,在0
°
~45
°
时,vi+vq=vi+vq;45
°
~90
°
时,vi+vq=—(vi+vq),能够有效解决现有costas回路以sin2θ作为dds控制出现的多值问题,确定θ的象限,进而得到360
°
范围内无模糊的相位差,对接收信号进行360
°
无模糊同步,保证了对带定位目标的定位精准性,本实施例中的待定位目标具体为fod探测车,当然,也可将本发明技术方案适
用至其他应用场景,对其他目标进行定位。
36.进一步地,主控模块经本振信号发生模块、第四倍频器与iq混频器连接,通过第四倍频器对本振信号进行倍频处理,利于接收反射器倍频回传的探测信号。
37.进一步地,iq混频器两路输出端分别经第六滤波器、第七滤波器与功分器连接,第六滤波器、第七滤波器具体为低通滤波器(lpf),用于进一步滤除杂波信号,保证定位的精准度。
38.进一步地,如图3所示,雷达测距单元具体为毫米波雷达,在本实施例1中采用3台毫米波雷达实现fod探测车的三维定位,并在fod探测车车体上设置反射器,用于接收雷达发射的探测信号并将该探测信号发射(反射)至雷达。如图4所示,图中空心点为待定位目标(fod探测车),实心点为毫米波雷达,点内数字代表雷达编号,雷达1、雷达2、雷达3到fod探测车的距离分别为d1、d2、d3。雷达固定安装,雷达位置可预先标定,3台雷达位置可标定于笛卡尔坐标中,雷达1、雷达2、雷达3的位置坐标分别为(x1,0,0),(0,y1,0),(0,0,z1),根据笛卡尔两点距离公式可联立方程求解fod探测车位置(x,y,z),这是一个二阶齐次方程组:
[0039][0040]
可化简为:
[0041][0042]
其中,
[0043][0044][0045]
其中,z满足以下一元二次方程:
[0046][0047]
一元二次求根公式取正解即可,解得z后代入(5)求解y,代入(4)求解x。通过该方法对fod探测车位置进行解算,雷达测距误差小于1cm,雷达间距10米情况下,系统测距误差小于1cm,测角误差小于3.5*10
‑3度;在机场跑道范围内(3.5km)定位效果相比rtk
‑
gps的水平精度高一个数量级。
[0048]
进一步地,雷达设于机械转台上,机械转台能够带动雷达实现360
°
全方位转动,进而实现全方面的扫描与检测,利于接收经反射器倍频后的探测信号。转台具体包括顺次连接的转动控制器、动力发生装置、传动组件以及台体,转动控制器与动力发生装置连接,控制动力发生装置的启停等工作状态;动力发生装置经传动组件与台体连接,台体上设有雷达,以此通过动力发生装置带动台体转动,进而实现雷达的转动。如专利公告号为cn206311975u、名称为“一种雷达转台装置的实用新型专利中的机座(转台+转台控制机构)。
[0049]
进一步地,主控模块为fpga、单片机中的任意一种。本实施例中采用fpga作为主控模块,计算能力强且成本低。
[0050]
进一步地,反射器包括顺次连接的第一接收天线、倍频回传模块和第一发射天线,发射天线和接收天线为全向天线,利于全方位接收雷达发射的射频探测信号。作为一选项,本实用新型反射器默认不工作,通过雷达主机2.4g通信模块远程唤醒,以保证多个反射器情况下,任意时刻只有1个反射器工作,避免多值情况发生,可靠性强。
[0051]
进一步地,如图5所示,反射器包括倍频回传模块,反射器接收到雷达发射的射频探测信号后,将该信号倍频放大后由其发射天线发出。具体地,倍频回传模块包括顺次连接的第四滤波器、第三放大器(lna)、第三倍频器、第四放大器和第五滤波器。其中,第四滤波器为带通滤波器,第五滤波器为低通滤波器。发射器经接收到的射频探测信号经放大、倍频、滤波处理后得到9.7ghz的射频信号,并通过其发射天线发射,实现射频探测信号的倍频回转,且倍频后的射频信号变成了双边带频谱,雷达接收端为准确解析该双边带频谱信号,得到相位无模糊的探测信号,且需采用bpsk解调模块对反射器倍频后的双边带频谱进行解调处理。本实用新型中反射器采用倍频回传的方式,使反射器接收信号与发射信号频率不同,实现了反射器天线的收发隔离,且由于收发频率不同,雷达可将反射器回传信号与其他地物反射信号区分开,极大提高地形适应能力,进一步保证了定位的精准性。
[0052]
进一步地,本振信号发生模块包括第一本振信号发生模块和第二本振信号发生模块,第一本振信号发生模块包括第一本振信号发生子模块和第二本振信号发生子模块,或第一本振信号发生模块包括第一本振信号发生子模块、第二本振信号发生子模块、第三本振信号发生子模块和第四本振信号发生子模块。具体地,本振信号发生模块为晶体振荡器、锁相环电路或dds频率合成器,本实施例中,具体采用dds频率合成器。其中,当第一本振信号发生模块包括第一本振信号发生子模块和第二本振信号发生子模块时,第一本振信号发生子模块、第二本振信号发生子模块分别用于产生上变频模块、下变频模块的1ghz一本振信号和3.95ghz二本振信号;当第一本振信号发生模块包括第一本振信号发生子模块、第二本振信号发生子模块、第三本振信号发生子模块和第四本振信号发生子模块时,第一本振信号发生子模块、第二本振信号发生子模块、第三本振信号发生子模块、第四本振信号发生子模块分别用于产生上变频模块的1ghz一本振信号、上变频模块的3.95ghz二本振信号、下变频模块的1ghz一本振信号以及下变频模块的7.9ghz二本振信号。第二本振信号发生模块用于产生qpsk调制模块的100mhz调制本振信号。
[0053]
进一步地,如图6所示,qpsk调制模块包括顺次连接的电压比较器、正交调制器,电压比较器与主控模块输出端连接,本振信号发生模块与正交调制器输入端连接,正交调制器输出端与上变频模块连接。更为具体地,晶振经dds频率合成器、带通滤波器与正交调制器连接,为正交调制器提供无杂波的调制本振信号。本实施例中,具体采用的是电压比较器tlv3501,以将主控模块产生的lvttl信号(伪随机码)转换为
±
1v的双极性归零信号(即没有直流分量),并输入正交调制器,以保证正交调制器的正常工作(正交调制器的工作要求为双极性归零信号输入)。正交调制器具体为正交调制器lt5598,用于根据调制本振信号、基带信号产生的初相已知的qpsk中频信号。
[0054]
进一步地,如图7所示,上变频模块包括顺利连接的第一混频器、第一滤波器、第二混频器、第二滤波器和第一放大器,第一本振信号发生子模块输出端与第一混频器连接,第
二本振信号发生子模块输出端与第二混频器连接。其中,第一滤波器、第二滤波器均为带通滤波器(bpf),100mhz中频信号、1ghz一本振信号经第一混频器(mixer)进行混频处理得到0.9ghz二中频信号,二中频信号经第一滤波器进行滤波处理并取上边带,实现第一次上变频;0.9ghz二中频信号与3.95ghz二本振信号经第二混频器进行混频处理,再经第二滤波器进行滤波处理取上边带、第一放大器(amp)进行放大,得到4.85ghz的射频探测信号,实现了第二次上变频处理,该射频探测信号经雷达的发射天线进行发射,由发射器进行接收。在本实用新型上变频模块中,通过两次上变频处理,能够抑制镜像频率,避免镜像频率影响测距精度。本实用新型射频探测信号的频段为4.7~5ghz,以满足高增益天线带宽与功放带宽需求。需要说明的是,本实用新型上变频本振(二本振信号)可以与中频解调/调制的本振无相参关系,因为上变频本振相位对载波相位恢复没有影响,载波相位回复质量仅取决于调制本振信号。
[0055]
进一步地,如图8所示,下变频模块包括顺次连接的第二放大器、第三混频器、第三滤波器和第四混频器,第一本振信号发生子模块经第一倍频器与第三混频器连接,第二本振信号发生子模块经第二倍频器与第四混频器连接,第一本振信号发生子模块产生1ghz一本振信号,经第一倍频器倍频处理后得到2ghz一本振信号;第二本振信号发生子模块产生3.95ghz一本振信号,经第二倍频器倍频处理后得到7.9ghz二本振信号。其中,第三滤波器为带通滤波器,9.7ghz射频信号经第二放大器放大处理后与7.9ghz二本振信号经第三混频器进行混频处理,得到1.8ghz射频信号,实现了第一次下变频;1.8ghz射频信号经第三滤波器滤波处理后输入第四混频器,2g二本振信号、1.8ghz射频信号经第四混频器进行混频处理得到200mhz中频信号,并将该中频信号传输至bpsk解调模块进行信号的解调处理,主控模块基于bpsk解调模块解调恢复的基带信号和载波信后进而获取雷达测距单元与反射器(fod探测车)的距离,以此实现对fod探测车的精准定位。
[0056]
实施例2
[0057]
本实施例与实施例1具有相同的发明构思,在实施例1的基础上,将实施例1中的第一本振信号发生子模块与第一倍频器整体替换为第三本振信号发生子模块,即第三本振信号发生子模块输出端与第三混频器连接,第三本振信号发生子模块直接产生7.9ghz的二本振信号;将第二本振信号发生子模块与第二倍频器整体替换为第四混频器,第四本振信号发生子模块输出端与第四混频器连接,第四本振信号发生子模块直接产生2ghz的一本振信号,以此实现射频信号的下变频处理。
[0058]
以上具体实施方式是对本实用新型的详细说明,不能认定本实用新型的具体实施方式只局限于这些说明,对于本实用新型所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演和替代,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1