一种电动葫芦安全监测装置控制电路的制作方法
1.本实用新型涉及起重机技术领域,尤其涉及一种电动葫芦安全监测装置控制电路。
背景技术:
2.电动葫芦是一种轻小型起重设备,安装于起重机或行车上,体积小、自重轻、操作简单、使用方便等特点,多用于工矿、仓储码头等场所。电动葫芦起重量一般为0.1~80吨,起升高度为3~30米,由电动机、传动机构和卷筒或链轮组成,分为钢丝绳电动葫芦和环链电动葫芦两种。
3.电动葫芦数量众多,有一定的故障率,如冲顶、断绳等恶性事故,轻则葫芦报废,重则伤及无辜。控制装置大部分都是传统的继电器控制,缺少智能化的手段,在电动葫芦运行过程中出现超载、限位动作、过电流等情况无法提前预警;出现事故后无法追溯,无法还原当时的情况,无法做到信息化。
4.随着电子技术的快速发展,市场呼唤智能化的电动葫芦。然而,高端的智能电动葫芦都是国外的品牌,如德马格、科尼等。价格昂贵,一般是普通电动葫芦的10倍价格。
5.为了提升国内电动葫芦的安全性能,避免电动葫芦超期超时服役带来的安全隐患,让用户时刻了解电动葫芦的“剩余寿命”,知道何时该大修了,迫切需要一种价格更低廉、具有寿命预测等智能化功能的电动葫芦数据“黑匣子”。
技术实现要素:
6.为解决上述技术问题,本实用新型提供了一种电动葫芦安全监测装置控制电路。
7.一种电动葫芦安全监测装置控制电路,其中:包括上升动作量输入电路、下降动作量输入电路、起重量输入电路、cpu及存储单元、数据远程传输单元, cpu及存储单元中包括cpu、存储器,cpu与存储器通过数据传输线路连接;上升动作量输入电路的信号输出端连接cpu及存储单元中cpu的上升动作量信号输入端,下降动作量输入电路的信号输出端连接cpu及存储单元中cpu 的下降动作量信号输入端,起重量输入电路的信号输出端连接cpu及存储单元中cpu的起重量信号输入端;cpu及存储单元中cpu的远程数据信号输出端连接所述数据远程传输单元的信号输入端。
8.所述的电动葫芦安全监测装置控制电路,其中:所述的上升动作量输入电路包括第一电阻、第一二极管、第二电阻、第一光电耦合器、3.3v电源,第一电阻的第一端用于连接所述电动葫芦的上升动作继电器的高电平信号输出端,第一电阻的第二端连接第一光电耦合器光源侧发光二极管的正极,第一光电耦合器光源侧发光二极管的负极接地,第一光电耦合器发光二极管两端并接第一二极管:第一二极管的正极连接第一光电耦合器发光二极管的负极,第一二极管的负极连接第一光电耦合器发光二极管的正极;第一光电耦合器受光器的电源输入端串接第二电阻后连接3.3v电源,第一光电耦合器受光器的电源输入端与第二电阻之间的中间接点连接cpu的电动葫芦上升动作量信号输入端,用于输出低电平的
电动葫芦上升动作量信号,第一光电耦合器受光器的接地端接地;
9.所述的下降动作量输入电路包括第三电阻、第二二极管、第四电阻、第二光电耦合器、3.3v电源,第三电阻的第一端用于连接所述电动葫芦的下降动作继电器的高电平信号输出端,第三电阻的第二端连接第二光电耦合器发光二极管的正极,第二光电耦合器发光二极管的负极接地,第二光电耦合器发光二极管侧两端子并接第二二极管,第二二极管的正极连接第二光电耦合器光源侧发光二极管的负极,第二二极管的负极连接第二光电耦合器光源侧发光二极管的正极;第二光电耦合器受光器的电源输入端串接第四电阻后连接3.3v电源,第二光电耦合器受光器的电源输入端与第四电阻之间的中间接点连接cpu的电动葫芦下降动作量信号输入端,用于输出低电平的电动葫芦下降动作量信号,第二光电耦合器u6受光器的接地端接地。
10.所述的电动葫芦安全监测装置控制电路,其中:所述的起重量输入电路包括重量传感器、第一lc低通滤波电路、第二lc低通滤波电路、第一限流电阻、第二限流电阻、ad转换芯片、起重量输出电路、时钟脉冲信号输入电路,第一lc低通滤波电路包括第一电感、第一电容,第二lc低通滤波电路包括第二电感、第二电容;
11.重量传感器的重量信号输出端正极连接第一lc低通滤波电路中第一电感的第一端,第一电感的第二端串接第一限流电阻后接入ad转换芯片的模拟量输入端正极,第一电容正极连接第一电感的第二端与第一限流电阻的中间接点,第一电容负极接地;
12.重量传感器的重量信号输出端负极连接第二lc低通滤波电路中第二电感的第一端,第二电感的第二端串接第二限流电阻后接入ad转换芯片的模拟量输入端负极,第二电容正极连接第二电感的第二端与第二限流电阻的中间接点,第二电容负极接地;
13.ad转换芯片的数字信号输出端连接起重量输出电路的输入端,起重量输出电路的输出端用于连接所述的cpu及存储单元中cpu的起重量信号输入端;
14.ad转换芯片的时钟脉冲信号输入端连接时钟脉冲信号输入电路的输出端,时钟脉冲信号输入电路的输入端用于连接所述的cpu及存储单元中cpu 的时钟脉冲信号输出端。
15.所述的电动葫芦安全监测装置控制电路,其中:所述的时钟脉冲信号输入电路包括第一npn型三级管、第三电阻、第四电阻;第一npn型三级管的集电极分成两路:第一路连接ad转换芯片的时钟脉冲信号输入端,第二路串接第三电阻后连接电源,第一npn型三级管的发射极接地,第一npn型三级管的基极串接第四电阻后连接所述的cpu及存储单元中cpu的时钟脉冲信号输出端,用于输入时钟脉冲信号。
16.所述的电动葫芦安全监测装置控制电路,其中:所述的起重量输出电路包括第五分压电阻、第六分压电阻、第五分压电阻串接在ad转换芯片的数字信号输出端与cpu的起重量信号输入端之间,第六分压电阻的第一端连接第五分压电阻与cpu的起重量信号输入端的中间接点,第六分压电阻的第二端接地。
17.所述的电动葫芦安全监测装置控制电路,其中:所述的cpu及存储单元中cpu采用stm32f103rct6,存储器采用铁电存储器fm25l256b。
18.所述的电动葫芦安全监测装置控制电路,其中:所述的数据远程传输单元包括数据远程传输模块、rs485接口芯片、rs485总线驱动电路、静电保护器,rs485接口芯片的cpu端数据输入输出接口对应连接cpu的远程数据输入输出接口,rs485接口芯片的数据远程传输模块端输入输出接口通过rs485总线驱动电路连接数据远程传输模块的远程数据输入输
出接口;静电保护器两端子并接在rs485接口芯片的数据远程传输模块端输入输出接口的两管脚上。
19.所述的电动葫芦安全监测装置控制电路,其中:所述的rs485接口芯片采用max3485,rs485接口芯片的rs485_rxd管脚、rs485_ctrl输入管脚、 rs485_txd管脚分别连接至cpu的rs485_rxd管脚、rs485_ctrl输出管脚、 rs485_txd管脚;所述的静电保护器采用sm712;
20.所述rs485总线驱动电路包括电源、上拉电阻、阻抗匹配电阻、下拉电阻,上拉电阻一端连接电源、另一端连接rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_a管脚,阻抗匹配电阻并接在rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_a管脚与rs485_b 管脚之间,下拉电阻一端接地、另一端连接rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_b管脚;所述的静电保护器sm712两管脚分别对应连接rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_a管脚、rs485_b管脚。
21.本实用新型提供的电动葫芦安全监测装置控制电路,通过上升动作量输入电路、下降动作量输入电路、起重量输入电路分别采集电动葫芦的上升动作量、下降动作量、起重量,将采集到信号送至cpu及存储单元中cpu的各采集信号输入端,由cpu来计算并判断剩余的使用寿命,cpu的计算结果一路存储于存储器,另一路通过数据远程传输单元传输出去,使使用者随时掌握电动葫芦的安全状况。
附图说明
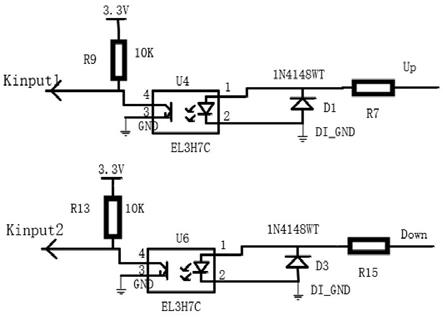
22.图1为本实用新型电动葫芦安全监测装置控制电路中上升动作量输入电路、下降动作量输入电路的电路原理图;
23.图2为本实用新型电动葫芦安全监测装置控制电路中起重量输入电路的电路原理图;
24.图3为本实用新型电动葫芦安全监测装置控制电路中cpu及存储单元的电路原理图;
25.图4为本实用新型电动葫芦安全监测装置控制电路中数据远程传输单元的电路原理图;
26.图5为本实用新型电动葫芦安全监测装置控制电路中进行电动葫芦寿命监测计算处理的流程图。
具体实施方式
27.本实用新型提供了一种电动葫芦安全监测装置控制电路,包括上升动作量输入电路、下降动作量输入电路、起重量输入电路、cpu及存储单元、数据远程传输单元,cpu及存储单元中包括cpu、存储器,cpu与存储器通过数据传输线路连接;上升动作量输入电路的信号输出端连接cpu及存储单元中cpu 的上升动作量信号输入端,下降动作量输入电路的信号输出端连接cpu及存储单元中cpu的下降动作量信号输入端,起重量输入电路的信号输出端连接 cpu及存储单元中cpu的起重量信号输入端;cpu及存储单元中cpu的远程数据信号输出端连接所述数据远程传输单元的信号输入端。
28.如图1所示,所述的上升动作量输入电路包括第一电阻r7、第一二极管 d1、第二电阻r9、第一光电耦合器u4、3.3v电源,第一电阻r7的第一端用于连接所述电动葫芦的上升动作继电器的高电平信号输出端,第一电阻r7的第二端连接第一光电耦合器u4光源侧发光二极管的正极,第一光电耦合器u4 光源侧发光二极管的负极接地,第一光电耦合器u4发光二极管两端并接第一二极管d1:第一二极管d1的正极连接第一光电耦合器u4发光二极管的负极,第一二极管d1的负极连接第一光电耦合器u4发光二极管的正极;第一光电耦合器u4受光器的电源输入端串接第二电阻r9后连接3.3v电源,第一光电耦合器u4受光器的电源输入端与第二电阻r9之间的中间接点连接cpu的电动葫芦上升动作量信号输入端input1管脚,用于输出低电平的电动葫芦上升动作量信号,第一光电耦合器u4受光器的接地端接地;
29.所述的下降动作量输入电路包括第三电阻r15、第二二极管d3、第四电阻r13、第二光电耦合器u6、3.3v电源,第三电阻r15的第一端用于连接所述电动葫芦的下降动作继电器的高电平信号输出端,第三电阻r15的第二端连接第二光电耦合器u6发光二极管的正极,第二光电耦合器u6发光二极管的负极接地,第二光电耦合器u6发光二极管侧两端子并接第二二极管d3,第二二极管d3的正极连接第二光电耦合器u6光源侧发光二极管的负极,第二二极管d3的负极连接第二光电耦合器u6光源侧发光二极管的正极;第二光电耦合器u6受光器的电源输入端串接第四电阻r13后连接3.3v电源,第二光电耦合器u6受光器的电源输入端与第四电阻r13之间的中间接点连接cpu 的电动葫芦下降动作量信号输入端,用于输出低电平的电动葫芦下降动作量信号,第二光电耦合器u6受光器的接地端接地。
30.如图2所示,所述的起重量输入电路包括重量传感器、第一lc低通滤波电路l3、c13、第二lc低通滤波电路l4、c16、第一限流电阻r12、第二限流电阻r14、ad转换芯片、起重量输出电路、时钟脉冲信号输入电路,第一lc 低通滤波电路包括第一电感l3、第一电容c13,第二lc低通滤波电路包括第二电感l4、第二电容c16;
31.重量传感器通过接插件p1连接入电路,重量信号输出端正极即接插件p1 的2脚连接第一lc低通滤波电路中第一电感l3的第一端,第一电感l3的第二端串接第一限流电阻r12后接入ad转换芯片hx710的模拟量输入端正极3 脚inn,第一电容c13正极连接第一电感l3的第二端与第一限流电阻r12的中间接点,第一电容c13负极接地;
32.重量传感器的重量信号输出端负极,即接插件p1的2脚,连接第二lc 低通滤波电路中第二电感l4的第一端,第二电感l4的第二端串接第二限流电阻r14后接入ad转换芯片的模拟量输入端负极4脚inp,第二电容c16正极连接第二电感l4的第二端与第二限流电阻r14的中间接点,第二电容c16 负极接地;
33.ad转换芯片hx710的数字信号输出端6脚dout连接起重量输出电路的输入端,起重量输出电路的输出端用于连接所述的cpu及存储单元中cpu的起重量信号输入端hx710_dout管脚;
34.ad转换芯片hx710的时钟脉冲信号输入端5脚pd_sck连接时钟脉冲信号输入电路的输出端,时钟脉冲信号输入电路的输入端用于连接所述的cpu及存储单元中cpu的时钟脉冲信号输出端hx710_sck。
35.所述的时钟脉冲信号输入电路包括第一npn型三级管q1、第三电阻r16、第四电阻r17;第一npn型三级管q1的集电极分成两路:第一路连接ad转换芯片hx710的时钟脉冲信号输入端5脚,第二路串接第三电阻r16后连接电源,第一npn型三级管q1的发射极接地,第一
npn型三级管q1的基极串接第四电阻r17后连接所述的cpu及存储单元中cpu的时钟脉冲信号输出端 hx710_sck,用于输入时钟脉冲信号。脉冲信号的作用类似节拍器,在节拍器的指挥下,采集数据依次按位输出。
36.所述的起重量输出电路包括第五分压电阻r1、第六分压电阻r2、第五分压电阻r1串接在ad转换芯片的数字信号输出端与cpu的起重量信号输入端之间,第六分压电阻r2的第一端连接第五分压电阻r1与cpu的起重量信号输入端的中间接点,第六分压电阻r2的第二端接地。
37.如图3所示,所述的cpu及存储单元中cpu(u11)采用stm32f103rct6,存储器u12采用铁电存储器fm25l256b。
38.如图4所示,所述的数据远程传输单元包括数据远程传输模块(图中未示出)、rs485接口芯片u3、rs485总线驱动电路、静电保护器f2,rs485接口芯片的cpu端数据输入输出接口对应连接cpu的远程数据输入输出接口, rs485接口芯片的数据远程传输模块端输入输出接口通过rs485总线驱动电路连接数据远程传输模块的远程数据输入输出接口;静电保护器f2两端子并接在rs485接口芯片的数据远程传输模块端输入输出接口的两管脚上。
39.所述的rs485接口芯片u3采用max3485,rs485接口芯片u3的rs485_rxd 管脚1脚、rs485_ctrl输入管脚2脚/3脚、rs485_txd管脚4脚分别连接至 cpu的rs485_rxd管脚、rs485_ctrl输出管脚、rs485_txd管脚;所述的静电保护器f2采用sm712;
40.所述rs485总线驱动电路包括3.3v电源、上拉电阻r10、阻抗匹配电阻 r8、下拉电阻r6,上拉电阻r10一端连接电源、另一端连接rs485接口芯片 max3485数据远程传输模块端输入输出接口的rs485_a管脚,阻抗匹配电阻r8 并接在rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_a 管脚与rs485_b管脚之间,下拉电阻r6一端接地、另一端连接rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_b管脚;所述的静电保护器sm712两管脚分别对应连接rs485接口芯片max3485数据远程传输模块端输入输出接口的rs485_a管脚、rs485_b管脚。
41.本实用新型是一种新型的基于dwp(design working period)具有寿命预测功能的电动葫芦“黑匣子”,体积小巧,导轨安装,接线方便,数据本地存储,远程展示,使用方便。主要应用于电动葫芦的原有小控制箱内。
42.本实用新型的创新点在于成功将dwp(design working period)寿命预测功能应用于电动葫芦“黑匣子”中。下面详述:
43.dwp(design working period),中文名设计工作周期,是起重机在设计之初就规定好的工作最大周期值。见下表:
44.表1总使用时间的设计极限值
[0045][0046]
当起重机的总使用时间接近或超过上表中对应的极限值时,表明起重机该大修go(general overhaul为延长起重机的安全使用寿命,根据特殊评估sa进行的所有改造和维护行为)了。
[0047]
上表中,引用了机构的使用等级m1
‑‑‑
m8,其对应的定义从下表给出。
[0048]
表2机构利用等级
[0049][0050]
为了计算当前起重机的剩余寿命dwp,需要引入另一个概念工作循环 (work cycle):动作顺序从起升载荷开始到运送、下降、放置、分离载荷,直至空载回到初始位置,准备起升另一个载荷的完整的工作过程。
[0051]
寿命预测依据国标gb/t 25196
‑
2018/iso 12482:2014起重机设计工作周期的监控,适用于作为起重机不可分割部分的起升机构以及给出机构等级的系列起升单元。
[0052]
此处假定已知起升机构的工作级别。
[0053]
计算dwp时,需要将载荷谱系数和总使用时间组合并转换为相应kmd=1 时的载荷
状态。
[0054][0055]
式子1中,
[0056]
f1是按照表3选取的计算工作任务的安全系数;
[0057]
c
n
是实际的总工作循环次数;
[0058]
i是单次工作循环的指数;
[0059]
p
i
是第i次工作循环吊运的有效载荷;
[0060]
p是起重机有效载荷的额定值;
[0061]
p
n
是固定和非固定吊具的总重量;
[0062]
t
i
是第i此工作循环起升机构负载部分的运行时间;
[0063]
t
ri
是第i此工作循环起升机构回程部分的运行时间;
[0064]
表3计算工作任务的安全系数f1[0065][0066]
根据表3描述,电动葫芦的“黑匣子”是自动记录系统,选取安全系数f1=1.0;
[0067]
在式子1中,负载重量占额定重量的比例越低,计算出的工作周期越小,相反,负载重量占额定重量的比例越高,计算出的工作周期越大,他们之间是三次方的关系。
[0068]
最后将计算出的dwp值t
dwp
和表3中规定的相应的极限值t
dwp
进行运算,得出剩余的s
dwp
时间,如下:
[0069]
剩余寿命s
dwp
=t
dwp
‑
t
dwp
‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑
式子2
[0070]
以上是剩余寿命计算的理论分析。
[0071]
为了实现上述分析计算,我们需要设计电动葫芦“黑匣子”,需要采集上升、下降的动作开关量以及葫芦的起吊重量。
[0072]
上升、下降属于动作开关量,取自电动葫芦原有的动作继电器的辅助触头。
[0073]
为了抗干扰,第一、第二光电耦合器u4、u6均采用光电耦合器el3h7c 进行信号隔
离。图2中,上升动作量输入电路、下降动作量输入电路均为输入高电平输入有效:输入24v正极;限流电阻r7避免光耦损坏,二极管 d1选用1n4148wt,反向并接在光耦输入端,起极性保护作用,下降动作量输入电路中各元器件同理,不再赘述。当上升动作量输入电路、下降动作量输入电路输入单有高电平24v输入时,光耦导通,此时输出端input1、 input2是低电平0v,否则是高电平3.3v,这两个管脚直接进cpu (stm32f103rct6)。见下图3。
[0074]
图3中的参数存储部分:存储器,选用铁电存储器fm25l256b,铁电存储器具有存储速度快,几乎无限次存取操作,寿命长等特点。用cpu的 spi2接口驳接此铁电存储器。
[0075]
在剩余寿命s
dwp
=t
dwp
‑
t
dwp
计算中,关键是计算t
dwp
的数值,t
dwp
和每次吊装循环的载荷比的三次方有关,为了计算载荷比,需要采集电动葫芦的起重量,在此选用电子秤专用称重芯片hx710实现重量采集和处理,其接口电路如图2;
[0076]
图2中,虚线框内是重量传感器的入口接线端子接插件,重量传感器实质是电桥电路,共计四根线,前两个是重量传感器的激励管脚(5v激励),激励后重量传感器会产生mv级别(重量传感器的灵敏度一般是2mv/v)的电压信号,从s+脚(信号正极)和s
‑
脚(信号负极)输入,然后经过两lc低通滤波电路(l1、c2以及l3、c3),再经过限流电阻r5、r6,以及抗干扰电容 c1后输入ad转换芯片hx710的信号引脚inp(正极)和inn(负极),ad 转换芯片hx710将重量信号采集和量化,以数字量信号从dout脚按照 pd_sck管脚的时序输出,和cpu对接。由于cpu是3.3v供电,芯片hx710 是5v供电,此处数据用电阻分压电路r1和r2来驳接cpu,时钟脉冲用三极管q1(采用8050)切换电平后输入给芯片hx710。经过重量测量的信号经过变换处理后就是公式1中的p
i
。
[0077]
另外,为了方便远程查看“黑匣子”的实时采集数据,如上升次数累计、下降次数累计、剩余寿命、实时吊重等,需要将“黑匣子”数据进行远程传输,此处设计为rs485电路,驳接数据远程传输模块,通过基站将数据远程传输到后台服务器。rs485电路设计如图4:
[0078]
图4中,rs485接口芯片采用max3485,rs485_rxd、rs485_ctrl、 rs485_txd三个信号均来自图3中的cpu,其中rs485_ctrl是控制信号方向的,从cpu这边看是高电平发送、低电平接收,即:如果rs485_ctrl是高电平,则从cpu发送数据到rs485总线;如果rs485_ctrl是低电平,则从rs485总线接收数据到cpu。r8是阻抗匹配电阻,取值120欧姆,当rs485 通讯线较长时需要采用。r6是下拉电阻,r10是上拉电阻,用于增大rs485 总线驱动能力。静电保护器件f2(sm712)确保rs485总线在接线或拆线瞬间产生的静电电荷入地,起到保护作用。
[0079]
经过上面的分析和处理,电动葫芦的寿命预测的相关参数都得到了,下面是寿命预测处理流程:
[0080]
1)首先需要确定工作循环的识别和过程记录。
[0081]
工作循环(work cycle)指的是起重机动作顺序从起升载荷开始到运送、下降、放置、分离载荷,直至空载回到初始位置,准备起升另一个载荷的完整的工作过程。识别过程图5所示。
[0082]
上面的循环次数判断和记录过程中,需要将吊重后的起升机构负载部分的运行时间t
i
和回程部分的运行时间t
ri
记录下来,在式子1计算中要用到。
[0083]
工作循环次数也就是式子1中的n,每次工作循环的吊重p
i
需要记录下来并按照式子1来计算动态的t
dwp
。
[0084]
最后根据式子2来计算剩余寿命s
dwp
。
[0085]“黑匣子”整体结构分为:电源板子、cpu及接口板子、显示与按键板子共计三块板子。三块板子之间采用接插件链接,最后安装于常用的仪表壳子内。
[0086]
设计“黑匣子”的供电电压为葫芦控制器常用的ac36v,直接取自现场的变压器输出。
[0087]
本实用新型是一种基于dwp(design working period)具有寿命预测功能的电动葫芦“黑匣子”,是在现有的电动葫芦控制系统基础上增加“黑匣子”功能而构成的。主要目的是寿命预测、记录故障代码、记录数据、提前预警;当运行参数达到预警级别时,触发声光报警装置进行预警,降低事故的发生。
[0088]
本实用新型主要设计应用在电动葫芦的控制系统中,可以是新出厂的电动葫芦预装该“黑匣子”,也可以是旧电动葫芦后安装该“黑匣子”。安装该“黑匣子”后,电动葫芦具有寿命预测功能,且其所有运行参数都将数字化并记录到内部的存储器中,包括导出时间、额定吨位、工作制、工作时间、上升累计次数、下降累计次数、超载次数、最大过程吊重及发生时间、故障代码、最大过程电流及发生时间等。
[0089]
以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1