一种动中成像相机积分时间计算方法与流程
1.本发明属于高分辨率对地遥感观测领域,涉及一种实现高敏捷卫星动中成像过程中动态求解相机积分时间的计算方法。
背景技术:
2.目前,观测卫星在遥感成像过程中,需要在曝光时间内保持相机视向对地面目标点的稳定指向,当目标点相对于相机视场存在相对速度时,需要根据在曝光时间内,目标点在成像平面上的移动距离不大于一个像元的原则来进行相机积分时间的计算。若观测卫星以轨道零姿态情况进行推扫成像,仅需考虑轨道及地速的因素,计算得到固定的相机积分时间用于对相机曝光时间的控制。但如果考虑敏捷卫星在遥感成像过程中三轴均具有主动旋转角速度的姿态控制,如进行正反双向推扫成像等,相机积分时间是在实时变化的,传统的相机积分时间计算方法便不再适用,需要提出一种新的姿态机动过程中成像相机积分时间动态计算方法,使动中成像过程中相机拍摄的曝光时间控制更加灵活,具备自适应性。
技术实现要素:
3.本发明的目的在于克服上述缺陷,提供一种动中成像相机积分时间计算方法,包括步骤:(1)计算视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
和相机目标角速度在视场坐标系下的投影rωi;(2)根据视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
计算视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire;根据视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
,相机目标角速度在视场坐标系下的投影rωi,视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire计算地面目标点相对于相机视场的线速度在视场坐标系下的投影rve;(3)根据地面目标点相对于相机视场的线速度在视场坐标系下的投影rve得到地面目标点相对于相机视场的线速度在焦平面坐标系的投影
rf
ve;并根据
rf
ve和视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
得到相机积分时间t
ir
。本发明提出的方法能够实现姿态机动过程中成像相机积分时间的动态求解,既能够满足常规沿飞行轨迹推扫的成像相机积分时间计算,也可以满足敏捷卫星沿飞行轨迹正反双向推扫过程中的成像相机积分时间计算,使动中成像过程中相机拍摄的曝光时间控制更加灵活,具备自适应性。
4.为实现上述发明目的,本发明提供如下技术方案:
5.一种动中成像相机积分时间计算方法,包括如下步骤:
6.(1)计算视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
和相机目标角速度在视场坐标系下的投影rωi;
7.(2)根据视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
计算视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire;
8.根据视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
,相机目标角速度在视场坐标系下的投影rωi,视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire计算地面目标点相对于相机视场的线速度在视场坐标系下的投影rve;
9.(3)根据地面目标点相对于相机视场的线速度在视场坐标系下的投影rve得到地面目标点相对于相机视场的线速度在焦平面坐标系的投影
rf
ve;并根据
rf
ve和视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
得到相机积分时间t
ir
。
10.进一步的,所述步骤(1)中,视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
的计算公式如下:
[0011][0012]
其中,c
rp
为视场坐标系相对于相机坐标系的坐标转换矩阵,c
pb
为相机坐标系相对于卫星本体坐标系的坐标转换矩阵,c
bo
为卫星本体坐标系相对于轨道坐标系的坐标转换矩阵;θr,φr分别为视向绕相机坐标系x轴转角,视向绕相机坐标系y轴转角,δω,δκ分别为按照3-1-2转序时,相机相对于卫星本体的安装滚动角、俯仰角、偏航角;c
312
矩阵的具体计算方法如下:α,β,γ代表一般变量;
[0013]
所述步骤(1)中,相机目标角速度在视场坐标系下的投影rωi的计算公式如下:
[0014]rωi=c
rpcpbb
ωi;
[0015]
其中,bωi为相机目标角速度在卫星本体坐标系下的投影。
[0016]
进一步的,所述步骤(2)的具体步骤为:
[0017]
(2.1)计算在j2000惯性坐标系i及转换惯性坐标系i下的卫星矢量
irs
和
irs
;
[0018]
(2.2)根据j2000惯性坐标系i及转换惯性坐标系i下的卫星矢量
irs irs
和
[0019]
、视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
得到视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire;
[0020]
(2.3)根据视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
和地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire,计算由地球自转引起地面目标点线速度在视场坐标系下的分量rv
er
;
[0021]
(2.4)根据视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
和相机目标角速度在视场坐标系下的投影rωi,计算rωi引起的地面目标点运动线速度在视场坐标系下的分量rv
rs
;
[0022]
(2.5)根据视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
计算卫星飞行速度在视场坐标系下的投影rvs;
[0023]
(2.6)根据步骤(2.3)所得rv
er
、步骤(2.34)所得rv
rs
和步骤(2.5)所得rvs,计算地面目标点相对于相机视场的线速度在视场坐标系下的投影rve;
[0024]
(2.7)根据地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire,计算地面目标点的经度λg及地理纬度δg;
[0025]
(2.8)根据地面目标点的经度λg、地理纬度δg、以及视场坐标系相对于轨道坐标系的坐标转换矩阵c
ro
,计算地垂线矢量在视场坐标系下的分量rrv;
[0026]
(2.9)根据地垂线矢量在视场坐标系下的分量rrv,对步骤(2.6)所得rve的z轴分量进行修正,得到地面目标点相对于相机视场的线速度在视场坐标系下的投影rve的修正值。
[0027]
进一步的,所述步骤(2.1)中,j2000惯性坐标系i及转换惯性坐标系i下的卫星矢量
irs
和
irs
的计算公式如下:
[0028]
irs
=c
iiirs
;
[0029][0030]
其中,r
orb
为卫星轨道地心距,ω为卫星轨道的升交点赤经,u为卫星轨道幅角,i
′
为卫星轨道倾角,c
ii
为j2000惯性坐标系i到转换惯性坐标系i的坐标转换矩阵,定义如下:
[0031]
其中k=1.0033633486。
[0032]
进一步的,所述步骤(2.2)中,视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire的计算公式如下:
[0033][0034][0035]
其中,re为地球半径,h为目标点高程,为地球半径,h为目标点高程,c
oi
为j2000惯性坐标系i到轨道坐标系o的坐标转换矩阵,c
ii
为j2000惯性坐标系i到转换惯性坐标系i的坐标转换矩阵,c
ro
(m,n)表示c
ro
的第m行第n列的元素。
[0036]
进一步的,所述步骤(2.3)中,rv
er
=c
rocoiiver
;
[0037]
其中,ωe为地球自转角速度,c
oi
为j2000惯性坐标系i到轨道坐标系o的坐标转换矩阵;
[0038]
所述步骤(2.4)中,
[0039]
所述步骤(2.5)中,其中,卫星轨道坐标系下速度切向分量卫星轨道坐标系下速度径向分量μ为地球引力常数,a为卫星轨道半长轴,e为卫星轨道偏心率,f为真近点角,r
orb
为卫星轨道地心距;
[0040]
所述步骤(2.6)中,rve=rv
er-rvs-rvrs
。
[0041]
进一步的,所述步骤(2.7)中:
[0042]
λg=arctan2(ere(2),ere(1));
[0043]
若若|δg′
|》1.56,δg=δg′
;
[0044]
其中,地心纬度ere(m)表示ere的第m个元素,λg为格林尼治真恒星时角,ωe为地球自转角速度,t为当前时刻,t0为注入的轨道参数的参考时刻,c
pn
为岁差章动矩阵,ee为地球模型偏心率。
[0045]
进一步的,所述步骤(2.8)中:
[0046]rrv=c
rocoiirv
;
[0047]
其中,c
oi
为j2000惯性坐标系i到轨道坐标系o的坐标转换矩阵,c
pn
为岁差章动矩阵,λg为格林尼治真恒星时角,ωe为地球自转角速度,t0为注入的轨道参数的参考时刻,
[0048]
进一步的,所述步骤(2.9)中:
[0049]
根据如下公式对步骤(2.6)所得rve的z轴分量进行修正:
[0050][0051]
其中,rv
′e(3)地面目标点相对于相机视场的线速度在视场坐标系下的投影rvez轴
分量的修正值,rve(m)为步骤(2.6)所得rve的第m个元素,的第m个元素,rrv(m)为rrv的第m个元素。
[0052]
进一步的,所述步骤(3)中,
[0053]
其中,c
fr
为视场坐标系到相应焦平面坐标系的坐标转换矩阵,c
312
矩阵的具体计算方法如下:
[0054][0055]
α,β,γ代表一般变量;
[0056][0057]
其中,d
pld
为相机像元尺寸,f
pld
为相机视主距,θr为视向绕相机坐标系x轴转角,θm为中心视向绕相机坐标系x轴转角,φr为视向绕相机坐标系y轴转角,
rf
ve(m)表示
rf
ve的第m个元素。
[0058]
本发明与现有技术相比具有如下至少一种有益效果:
[0059]
(1)本发明创新性的提出了一种动中成像相机积分时间计算方法,能够实现姿态机动过程中成像相机积分时间的动态求解,既能够满足常规沿飞行轨迹推扫的成像相机积分时间计算,也可以满足敏捷卫星沿飞行轨迹正反双向推扫过程中的成像相机积分时间计算,使动中成像过程中相机拍摄的曝光时间控制更加灵活,具备自适应性;
[0060]
(2)本发明充分考虑各项因素,包括星体在轨道上的飞行速度,地速,相机相对于轨道的姿态机动角速度等,可以根据预估状态量动态求解动中成像过程中的相机积分时间,完成相机曝光时间的灵活控制;
[0061]
(3)本发明计算方法提高了相机积分时间的控制效率,实现了稳定的控制效果。
附图说明
[0062]
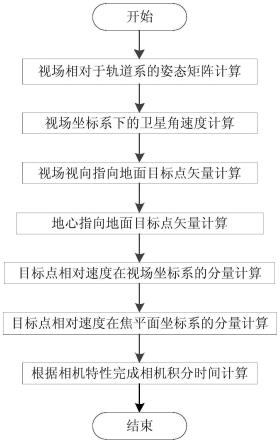
图1为本发明一种动中成像相机积分时间计算方法的流程图。
具体实施方式
[0063]
下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
[0064]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0065]
目前的成像相机积分时间计算方法仅考虑了星体在轨道上的飞行速度以及地速的影响,需要保证卫星相对于轨道坐标系时处于稳定的零姿态角速度状态,即传统观测卫星在进行推扫成像时计算相机积分时间的方法仅适用于卫星轨道系零姿态情况。但是,如
今的遥感卫星需要更大范围的连续成像,这就要求卫星要具备机动过程中连续成像的能力,相应的相机积分时间计算方法也需要充分考虑卫星自身姿态机动的影响。本发明是在现有技术的基础上,充分考虑各项因素,包括星体在轨道上的飞行速度,地速,相机相对于轨道的姿态机动角速度等等,可以根据预估状态量动态求解动中成像过程中的相机积分时间,完成相机曝光时间的灵活控制。
[0066]
本发明的技术解决方案是:一种动中成像相机积分时间计算方法,适用于高分辨率对地遥感观测领域,包括如下步骤:
[0067]
(1)本发明需要计算卫星任意指向视场下的相机积分时间,首先需要根据星体本体相对于轨道系的坐标转换矩阵c
bo
,相机相对于卫星本体的安装角δω,δκ(按照3-1-2转序),视向绕相机坐标系y轴转角φr,视向绕相机坐标系x轴转角θr,计算得到各视场坐标系相对于轨道系的坐标转换矩阵c
ro
表示如下:
[0068][0069]
其中,c
rp
为视场坐标系相对于相机坐标系的坐标转换矩阵,c
pb
为相机坐标系相对于卫星本体坐标系的坐标转换矩阵。c
312
(α,β,γ)则可以由下式计算得到:
[0070]
α,β,γ代表一般变量
[0071]
其中,轨道坐标系为参考坐标系的一种,参考坐标系{o-xyz}的原点o在卫星质心;轨道坐标系中,定义由卫星质心指向地心的坐标轴是z轴,x轴为卫星飞行方向,y轴为z轴、x轴组成右手正交坐标系。
[0072]
其次需要计算相机目标角速度在视场坐标系下的投影:
[0073]rωi=c
rpcpbb
ωi[0074]
(2)计算相机视场坐标系的地速和斜距。
[0075]
对视场坐标系r计算得到视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire,进而得到地面目标点相对于相机视场的线速度在视场坐标系下的投影rve。具体计算方法如下:
[0076]
(2-1)计算在惯性坐标系下的卫星矢量:
[0077][0078]
irs
=c
iiirs
[0079]
其中,r
orb
为卫星轨道地心距,ω为卫星轨道的升交点赤经,u为卫星轨道幅角,i
′
为卫星轨道倾角,c
ii
为j2000惯性坐标系i到转换惯性坐标系i的坐标转换矩阵,定义如下,其中k=1.0033633486。
[0080]
[0081]
(2-2)计算视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,以及地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire:
[0082][0083][0084][0085][0086][0087][0088]
其中,c
ro
(m,n)表示矩阵c
ro
的第m行第n列的元素。c
oi
为j2000惯性坐标系i到轨道坐标系o的坐标转换矩阵,re为地球半径,h为目标点高程。
[0089]
(2-3)计算由地球自转引起地面目标点线速度在视场坐标系r下的分量:
[0090][0091]rv
er
=c
rocoiiver
[0092]
其中,ωe为地球自转角速度。
[0093]
(2-4)计算rωi引起的地面目标点运动线速度在视场坐标系下的分量rv
rs
:
[0094][0095]
(2-5)计算卫星飞行速度在视场坐标系r下的投影:
[0096][0097][0098]
[0099]
其中,μ为地球引力常数,a为卫星轨道半长轴,e为卫星轨道偏心率,f为真近点角,r
orb
为卫星轨道地心距;ovu为卫星轨道坐标系下速度切向分量;ovr为卫星轨道坐标系下速度径向分量;rvs为卫星运行速度矢量在视场坐标系下的投影。
[0100]
(2-6)根据步骤(2-3)、步骤(2-4)、步骤(2-5)的结果,计算地面目标点相对于相机视场的线速度在视场坐标系下的投影:
[0101]rve=rv
er-rvs-rvrs
[0102]
(2-7)计算目标点的经度λg及地理纬度δg:
[0103][0104]
λg=arctan2(ere(2),ere(1))
[0105]
地心纬度
[0106]
(若|δ
′g|》1.56,则δg=δ
′g)
[0107]
其中λg为格林尼治真恒星时角,t0为注入的轨道参数的参考时刻,c
pn
为岁差章动矩阵,ee为地球模型偏心率,取值:0.08181919。
[0108]
(2-8)计算地垂线矢量在视场坐标系r下的分量:
[0109][0110][0111]rrv=c
rocoiirv
[0112]
(2-9)计算rvez轴分量的修正值:
[0113][0114][0115][0116]
其中,rve(m)为矢量rve的第m个元素;rrv(m)同理。
[0117]
(3)计算相机积分时间
[0118]
将地面目标点的相对速度从视场坐标系转回每个相机的焦平面坐标系rf:
[0119][0120]
其中,c
fr
为相机视场坐标系到相应焦平面坐标系的坐标转换矩阵。
[0121]
计算相机积分时间:
[0122][0123]
其中d
pld
为相机像元尺寸,f
pld
为相机视主距,θm为中心视向绕相机坐标系x轴转角;θr为视向绕相机坐标系x轴转角,φr为视向绕相机坐标系y轴转角。
[0124]
实施例1:
[0125]
目前,由于观测卫星在遥感成像过程中三轴均具有主动旋转角速度的姿态控制,传统相机积分时间计算方法不再适用。相比于传统方法,本实施例分别选取中心视场及
±
y线阵的视场坐标系为基准,考虑了地球的非球形影响,进行了姿态机动过程中相机三个视场的地速和斜距计算,进而利用相机特性参数完成了动中成像相机积分时间的计算。
[0126]
本发明在实际应用时一般需要提前完成计算,即轨道相应状态量需要采用预估状态量且同时需要计算中心视场以及
±
y线阵的相机积分时间,按照如图1所示的流程图,本发明的具体实施方法如下:
[0127]
(1)视场相对于轨道系的姿态矩阵计算:
[0128]
(1-1)计算卫星本体坐标系相对于轨道坐标系的坐标转换矩阵c
bo
:
[0129][0130]
其中,θg、ψg为卫星本体在轨道坐标系下的预估目标姿态角(3-1-2转序)
[0131]
(1-2)计算中心视场m、+y线阵及-y线阵三个视场相对于轨道系的坐标转换矩阵c
ro
,r=m,+y,-y:
[0132][0133][0134][0135]
其中,δω,δκ为相机相对于卫星本体的安装角度,初值均为0.0;φr为视向绕相机坐标系y轴转角,θm为中心视场视向绕相机坐标系x轴转角,θ
+y
为+y线阵视向绕相机坐标系x轴转角,θ-y
为-y线阵视向绕相机坐标系x轴转角。参考参数(弧度制)如表1所示:
[0136]
表1
[0137]
φrθmθ
+y
θ-y-0.006/180*pi-0.65203/180*pi-0.99741/180*pi-0.30666/180*pi
[0138]
(2)视场坐标系下卫星角速度,即相机目标角速度在视场坐标系下的投影rωi计算:
[0139]mωi=c
mpp
ωi[0140]
+y
ωi=c
+ypp
ωi[0141]-y
ωi=c-ypp
ωi[0142]
(3)视场视向指向地面目标点矢量计算:
[0143]
(3-1)计算在惯性坐标系下的卫星矢量:
[0144][0145]
irs
=c
iiirs
[0146]
其中,r
orb
为卫星轨道地心距,ω为卫星轨道的升交点赤经,u为卫星轨道幅角,i
′
为卫星轨道倾角,c
ii
为j2000惯性坐标系i到转换惯性坐标系i的坐标转换矩阵,定义如下,其中k=1.0033633486。
[0147][0148]
(3-2)分别对中心视场m、+y线阵及-y线阵三个参考坐标系计算得到视场z轴指向地面目标点的矢量在j2000惯性坐标系下的投影
irzr
,其中r=m,+y,-y:
[0149][0150][0151][0152][0153][0154]
其中,re为地球半径,取6378.137km;h为目标点高程,通过查询数字高程图获取,初值为0。
[0155]
(4)地心指向地面目标点矢量ire,即地心指向地面目标点的矢量在j2000惯性坐标系下的投影ire计算:
[0156]
[0157][0158][0159]
(5)目标点相对线速度在视场坐标系的分量,即地面目标点相对于相机视场的线速度在视场坐标系下的投影rve计算:
[0160]
(5-1)计算由地球自转引起指向点线速度在视场坐标系下的分量rv
er
:
[0161][0162]mv
em
=c
mocoiivem
,
+yve+y
=c
mocoiive+y
,-yve-y
=c
mocoiive-y
[0163]
其中,ωe为地球自转角速度,装订为7.2921159e-5rad/s。
[0164]
(5-2)计算相机目标角速度在视场坐标系下的投影rωi引起的地面指向点运动线速度在视场坐标系下的分量rv
rs
:
[0165][0166]
(5-3)计算卫星飞行速度在视场坐标系下的投影rvs:
[0167][0168][0169][0170]
其中,μ为地球引力常数,a为卫星轨道半长轴,e为卫星轨道偏心率,f为真近点角,r
orb
为卫星轨道地心距;ovu为卫星轨道坐标系下速度切向分量;ovr为卫星轨道坐标系下速度径向分量;rvs为卫星运行速度矢量在视场坐标系下的投影。
[0171]
(5-4)根据步骤(5-1)、步骤(5-2)、步骤(5-3)的结果,计算指向点相对于卫星的线速度在视场坐标系下的分量,即地面目标点相对于相机视场的线速度在视场坐标系下的投影rve:
[0172]mve=mv
em-mvs-mvms
[0173]
+y
ve=
+yve+y-+yvs-+yv+ys
[0174]-y
ve=-yve-y-‑yv
s-‑yv-ys
[0175]
(5-5)计算三个视线目标点的经度λg及地理纬度δg:
[0176][0177][0178][0179]
λ
gm
=arctan2(er
em
(2),er
em
(1))
[0180]
λ
g+y
=arctan2(er
e+y
(2),er
e+y
(1))
[0181]
λ
g-y
=arctan2(er
e-y
(2),er
e-y
(1))
[0182]
地心纬度:
[0183]
(若|δ
′
gr
|》1.56,则δ
gr
=δ
′
gr
,r=m,+y,-y)
[0184]
其中λg为格林尼治真恒星时角,t为当前所计算状态对应时刻,t0为注入的轨道参数的参考时刻,c
pn
为岁差章动矩阵,ee为地球模型偏心率,装订值为0.08181919。
[0185]
(5-6)计算地垂线矢量在三个视场坐标系下的分量:
[0186][0187][0188]
[0189][0190]
mrvm
=c
mocoiirvm
,
+yrv+y
=c
+yocoiirv+y
,-yrv-y
=c-yocoiirv-y
[0191]
(5-7)计算目标点相对速度z轴分量的修正值,即地面目标点相对于相机视场的线速度在视场坐标系下的投影rvez轴分量的修正值rv
′e(3):
[0192][0193][0194][0195]
(6)目标点相对速度在焦平面坐标系的分量,即地面目标点相对于相机视场的线速度在焦平面坐标系的投影
rf
ve计算:
[0196][0197][0198][0199]
(7)根据相机特性完成相机积分时间的计算:
[0200]
(7-1)计算相机积分时间
[0201][0202][0203][0204]
其中d
pld
为相机像元尺寸,装订值7e-6m,f
pld
为相机视主距,装订值7.0197m。
[0205]
(7-2)计算相机积分时间代码:
[0206]
对三个相机视场计算积分时间代码:
[0207][0208]
[0209][0210]
其中,dec2hex函数为由十进制转为十六进制函数,nm、n
+y
、n-y
为积分时间代码,十六进制,tc为相机的时钟周期,取值为1/30μs;int和0.5为四舍五入取整用。
[0211]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
[0212]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1