一种基于微机械光纤集束扫描的车载雷达系统及其工作方法与流程
1.本发明属于光纤通讯、车载雷达技术领域,尤其涉及一种基于微机械光纤集束扫描的车载雷达系统及其工作方法。
背景技术:
2.车载雷达是未来智能辅助驾驶、无人驾驶汽车多传感器体系中必不可少的核心传感器之一,随着无人驾驶市场的高速发展,越来越多的企业加入对激光雷达的新应用开发和对先进技术的追求。据《中国自动驾驶发展报告2020》的表述,2025年后激光雷达应用会加速,届时政策、技术、基础设施比较完善,而l3级别车型也会较大规模推出,伴随着激光雷达的价格因技术的成熟会大幅降低,搭载激光雷达的车型也将不再仅限于高端车型,而是下探到中高端走量车型。
3.最早的激光雷达是机械式,在一个台子上安装激光探测器,64线需要一一对应的64组激光器和探测器,然后供电让它转起来,这是一个非常复杂的光机电系统,不利于大规模量产;而且无法将其隐藏在车辆结构内。机械式雷达之后是固态雷达,如flash(闪光)雷达,其体积小了很多,但近距离会曝光过度,远距离又测不到,测距在50米以内。还有一种固态雷达是opa(光学相控阵),用相控阵聚焦扫描,类似毫米波雷达,却比毫米波设计难度大。
4.随着目前车载激光雷达技术发展日渐成熟,为了提高探测精度及探测距离。采用mems(微机电系统)微镜技术,是将微光反射镜与mems驱动器集成在一起的光学mems器件。mems微镜采用平动和扭转(x、y两个方向)两种机械运动方式进行扫描,可以实现比较高的扫描频率。现在业界普遍认为,mems方案比较可靠,与机械式相比,mems激光雷达只需要一个激光器和mems微镜的组合就能实现激光脉冲的扫描。在分辨率方面,mems激光雷达实现64线只需要mems微镜将单个激光器发出的脉冲扫描成的点阵组成64条线就可以了,所以容易实现高分辨率,体积也比较小,但是探测范围还是有局限性。
5.mems微振镜技术路线,其核心技术重点在发射、扫描、探测三个层面。目前机械式激光雷达已经可以做到128线。而固态激光雷达已经有300线、600线、甚至700线。现有的一种车载雷达系统结构示意图,如图1所示,激光光源发出的光信号脉冲入射至反射镜,mem微镜驱动器扭转反射镜,将激光光信号发射至被测物体扫描,经被测物体漫反射后的光信号脉冲由反射光接收器接收,之后进行数据处理。为了提高探测范围、精度及探测距离,传统的车载应用需要较大的mems镜面,镜面厚度也需要相应增加,导致微镜扫描时的质量增加,降低了器件的扫描频率同时也降低了mems振镜抗振动和冲击的能力,可靠性受影响。现有的mems微镜体积较大,价格在千元量级,整个车载雷达系统在万元量级上。
技术实现要素:
6.本发明的目的在于提供一种基于微机械光纤集束扫描的车载雷达系统及其工作方法,车载雷达系统以较小的尺寸,就能实现车辆360度全方位快速扫描,成本低,极大提高探测范围、速度、精度及探测距离。
7.为实现上述目的,本发明采用的技术方案是:一种基于微机械光纤集束扫描的车载雷达系统,包括光纤激光器、光纤集束、透镜、反射镜、光纤准直器、微机械扫描装置和发射器;所述的光纤激光器与光纤集束的输入光纤连接;所述的发射器与所述光纤集束的输出端连接;所述的微机械扫描装置微调所述反射镜的位置将输入的光束信号反射至所述光纤集束的不同端口输出;所述光纤集束根据所述微机械扫描装置的扫描特性和所述透镜的设计特性来排列;所述透镜用于将所述光纤集束输入的光束信号变成准直光束;所述反射镜将所述准直光束反射回所述光纤集束;所述微机械扫描装置以极小的角度变化带动所述反射镜,实现光束信号在所述光纤集束中的不同光纤通道间切换输出;所述发射器将实现各个方位的光束信号输出探测。
8.进一步地,所述光纤集束的光纤柔性好,并在车辆全方位分布。
9.进一步地,所述光纤集束的光纤排列为紧密排列、正方排列或间隙排列。
10.进一步地,所述光纤集束和所述透镜组合后的光斑较小,使得所述微机械扫描装置和反射镜的尺寸较小。
11.进一步地,所述的发射器的光纤一字形排列发射呈多角度的多束光,实现三角法多点测物。
12.进一步地,所述光纤集束的每单根输出光纤,再接1xn分束器分向不同的方向,接收不受干扰,输出探测的通道数n倍增加。
13.本发明还提供一种基于于微机械光纤集束扫描的车载雷达系统的工作方法,所述光纤激光器发射激光光信号脉冲,从所述光纤集束的输入光纤输入,经所述透镜准直后入射到所述反射镜,所述微机械扫描装置微调所述反射镜的位置将输入的光束信号反射至所述光纤集束的不同端口输出,由相应的发射器发射出光束信号探测,根据所述微机械扫描装置在水平方向θx和垂直方向θy二维均速变化实现光纤阵列最快速扫描。
14.与现有技术相比,本发明具有以下有益效果:
15.本发明提供了一种基于微机械光纤集束扫描的车载雷达系统及其工作方法,由于光纤集束光纤柔性好,可以全方位分布,能实现车辆360度全方位快速扫描,极大提高探测范围和探测距离;微机械扫描装置和反射镜尺寸较小成本在百元量级,整个车载雷达系统也就在千元量级,成本极低。本发明车载雷达系统尺寸小,主体器件尺寸在扫描频率和精度高,抗振动冲击能力也更好。并且在车载雷达实际使用中,根据需要的线数情况,可以采用两个以上的本发明车载雷达系统。
附图说明
16.图1是现有的一种车载雷达系统结构示意图。
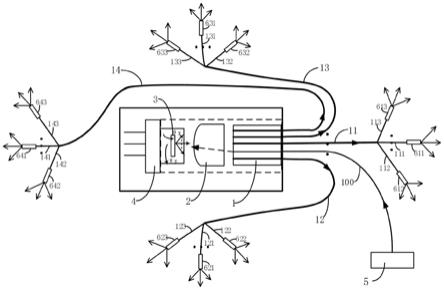
17.图2是本发明实施例的车载雷达系统结构示意图。
18.图3是本发明实施例的车载雷达系统中主结构示意图。
19.图4是单根光纤分成1xn输出的示意图。
20.图5是本发明实施例的车载雷达系统中光纤集束光纤排列一结构示意图。
21.图6是本发明实施例的车载雷达系统中光纤集束光纤排列二结构示意图。
22.图7是本发明实施例的车载雷达系统中光纤集束光纤排列三结构示意图。
23.图8是本发明实施例的车载雷达系统中一种发射器多点测物示意图。
24.图9是本发明实施例的车载雷达系统中另一种发射器多点测物示意图。
25.图10是本发明实施例的车载雷达系统在车辆中应用示意图。
具体实施方式
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
27.如图2所示,本发明实施例提供了一种基于微机械光纤集束扫描的车载雷达系统,其包括光纤集束1、透镜2、反射镜3、微机械扫描装置4、光纤激光器5、发射器6等。所述光纤激光器5与光纤集束1的输入光纤100连接。其中,所述发射器6包括n个子发射器611、612
…
6nn,图2中仅示意出611,612,613,621,622,623,631,632,633,641,642,643等部分子发射器,所述发射器6与所述光纤集束1的输出集束光纤的输出端连接。所述微机械扫描装置4微调所述反射镜3的位置将来自所述透镜2的输入光束信号反射至光纤集束1的不同集束光纤的输出端输出。
28.所述光纤激光器5用于发射激光光信号脉冲。所述光纤集束1根据所述微机械扫描装置4的扫描特性和透镜设计特性来排列。所述透镜2用于将所述光纤集束1输入的信号光变成准直光束。所述反射镜3将光信号反射回所述光纤集束1。所述微机械扫描装置4以极小的角度变化带动所述反射镜3,实现光信号在所述光纤集束1中不同光纤通道间切换输出。所述发射器6实现各个方位的光信号的输出,探测目标物。
29.优选的,所述光纤集束1的光纤柔性好,可以在车辆上全方位分布。
30.优选的,所述光纤集束1的光纤排列有紧密排列、正方排列、间隙排列等。
31.优选的,所述光纤集束1和透镜2组合后的光斑较小,决定所述微机械扫描装置4和反射镜3只需要较小的尺寸。
32.优选的,所述发射器6的光纤一字形排列发射呈多角度的多束光,实现三角法多点测物。
33.本发明的具体实施过程如下:
34.如图2所示,本发明实施例中,所述光纤激光器5发射激光光信号脉冲,由所述光纤集束1的输入光纤100输入,输入的所述激光光信号脉冲经所述透镜2准直后入射到所述反射镜3,所述微机械扫描装置4采用mems(微机电系统)微镜技术,是将微光反射镜与mems驱动器集成在一起的光学mems器件。mems微镜技术采用平动和扭转(在水平和垂直θx、θy两个方向)两种机械运动方式进行扫描,可以实现比较高的扫描频率。能实现所述反射镜3平动和扭转(在水平和垂直θx、θy两个方向)的旋转棱镜装置均属于微机械扫描装置4。通过平动和扭转(在水平和垂直θx、θy两个方向)微调所述反射镜3的位置将输入的所述激光光信号脉冲反射至所述光纤集束1的不同端口输出,实现光信号在所述光纤集束1的光纤阵列中最快速切换输出,再由相应的所述发射器6发射光信号,探测目标物。所述光纤集束1的输出集束光纤为11、12
…
1n,图2中只展示了11、12、13、14等部分集束光纤。所述第一输出集束光纤11中含有多条光纤,再分为111、112、113等小集束光纤,第一小集束光纤111连接第一子发射器611将光信号发射扫描,第二小集束光钎112连接第二子发射器612将光信号发射扫描,
第三小集束光纤113连接第三子发射器613将光信号发射扫描,以此类推,其余的输出集束光纤12、13、14
…
1n,同第一输出集束光纤11同样的输出方式。多个子发射器611、612、613、621
…
6nn为多纤准直器(图2中仅示意出611,612,613,621,622,623,631,632,633,641,642,643等部分子发射器),光纤一字形排列发射呈多角度的多束光,实现三角法多点测物。如图2所示,所述输出集束光纤11、12
…
1n可实现车辆360度全方位无死角探测。
35.如图3所示,的本发明实施例的车载雷达系统中主结构示意图,由于所述光纤集束1和透镜2组合后的光斑较小,决定所述微机械扫描装置4和反射镜3只需要较小的尺寸,只需要较小的角度变化就能实现激光光信号脉冲在所述光纤集束1中不同光纤切换输出扫描。
36.如图4-7所示的本发明实施例的单根光纤分成1xn输出、车载雷达系统中光纤集束光纤排列一、排列二、排列三结构示意图,所述光纤集束1的光纤排列根据所述微机械扫描装置扫描特性和透镜设计来排列,如图5所示的紧密排列、图6所示的正方排列、如图7所示的间隙排列。所述光纤集束1的光纤数量可以根据实际应用来灵活调整线数。
37.如图8,图9所示的本发明实施例的车载雷达系统中一种和另一种发射器多点测物示意图,以第一子发射器611为例说明,所述光纤集束1的输出光纤和第一子发射器611连接,其为多纤准直器,一字形光纤排列发射呈多角度(θ1、θ2、θ3、θ4)的多束光,光信号脉冲发射到被测物体漫反射后,光信号脉冲由设置在车辆的前后左右的接受装置7接收处理分析,实现三角法多点测物,从而获取目标物的距离、方位等信息,极大提高探测精度和探测速度。
38.参见图10,是本发明实施例的车载雷达系统在车辆中应用示意图。
39.如图10所示,本发明的车载雷达系统的光纤柔性好,可以全方位分布于车辆的全后左右,做到360度全方位无死角的探测,极大提高探测范围和探测距离,由被测物体反射后的光信号脉冲分别由接收装置71、72、73、74接收处理分析,从而获取目标物的距离、方位等信息,所述接收装置71、72、73、74安装位置为:四个车门部位、两个前车部位以及两个车尾部位。
40.本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可以得出其它各种形式的基于环行器的车载激光雷达微型光源,凡依本发明范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1