一种深基坑围护结构变形远程监控系统的制作方法
1.本技术涉及深基坑领域,尤其是涉及一种深基坑围护结构变形远程监控系统。
背景技术:
2.随着城市的发展,基坑规模和开挖深度不断增加,深基坑的安全问题成为工程施工首要考虑的因素。因为基坑开挖周围的土体、建筑物和埋设物会对基坑围护墙结构墙体(简称基坑围护墙,例如地下连续墙)等挤压,造成基坑围护墙结构墙体的变形,所以在基坑施工过程中要对基坑围护墙结构墙体进行监测,目前现有监测多为人工定时监测,浪费时间,不便于监测。
技术实现要素:
3.为了便于监测,本技术提供一种深基坑围护结构变形远程监控系统。
4.本技术提供的一种深基坑围护结构变形远程监控系统,采用如下的技术方案:一种深基坑围护结构变形远程监控系统,包括设置于围护内侧的支杆,所述支杆背离围护的一端固定连接有连接绳,所述连接绳下端固定连接有重锤,所述重锤设置有用于检测围护变形的检测装置,所述围护设置有用于警示人员的警示机构,所述检测装置与警示机构相连接,所述检测装置可根据围护变形情况控制警示机构启闭。
5.通过采用上述技术方案,通过利用重锤的重力,使连接绳能够保持竖直状态,且当围护变形产生朝向背离基坑内壁的方向倾斜时,重锤与围护之间的距离变产生变化,从而检测装置能够检测到距离变化,进而控制警示机构开启,警示机构能够提醒工作人员前来查看维护,便于监测。
6.可选的,所述警示机构包括固定连接于围护上端的支架,所述支架固定连接有限位块,所述限位块滑移穿设有升降杆,所述升降杆上端设置有led,所述围护设置有用于驱动升降杆往复升降的驱动组件,所述驱动组件连接于升降杆,驱动组件与检测装置相连接。
7.通过采用上述技术方案,检测装置控制驱动组件启动,驱动组件驱动升降杆往复移动并伸出基坑,从而能够更加明显的提醒人员,围护产生变形。
8.可选的,所述驱动组件包括固定连接于围护的驱动电机,所述驱动电机输出轴固定连接有连接杆,所述连接杆固定连接有驱动块,所述升降杆下端固定连接有弧形块,所述弧形块的弧形侧沿驱动块的转动轨迹设置,所述弧形块的弧形凹侧朝向下方设置,且所述弧形块的两端分别固定连接有延伸块,所述弧形块与延伸块均开设有相互连通的连通槽,所述驱动块滑移穿设于连通槽内。
9.通过采用上述技术方案,驱动电机启动,带动连接杆转动,使驱动块在连通槽内滑移,从而带动弧形块能够上下移动,进而使升降杆能够上下升降,警示工作人员。
10.可选的,所述检测装置包括:距离传感器,设置于重锤朝向围护的一侧侧壁,用于检测重锤与围护之间的距离变化并输出距离检测信号;
比较电路,与距离传感器输出端相连接,预设有距离基准值,接收距离检测信号,并输出比较信号;以及,控制电路,与比较电路输出端、驱动电机相连接,且接收比较信号,并基于比较信号输出控制驱动电机启闭的控制信号。
11.通过采用上述技术方案,距离传感器实时检测重锤与围护之间的距离,并将检测到的距离以距离检测信号形式发出,比较电路接收距离检测信号后通过转换成相应的距离检测值,并与距离基准值比较之后输出比较信号,控制电路接收该比较信号,并控制驱动电机启闭。
12.可选的,所述比较电路包括比较器a、基准电路,基准电路包括第一电阻器r1、第二电阻器r2;其中,所述比较器a,正相输入端与距离传感器输出端相连接,反相输入端与第一电阻器r1相连接;所述第一电阻器r1,一端与比较器a反相输入端相连接,另一端连接于电源vcc;所述第二电阻器r2,一端接地,另一端与第一电阻器r1和比较器a反相输入端的连接点相连接。
13.通过采用上述技术方案,基准电路用于设置距离基准值,比较器a用于将距离检测值与距离基准值进行比较,当距离检测值大于距离基准值时,比较器a输出高电平。
14.可选的,所述控制电路包括第一三极管q1、延时单元、第一继电器km1、第三电阻器r3、第二三极管q2;其中,所述第一三极管q1,基极与比较器a输出端相连接,发射极接地;所述led的一端连接于电源vcc,led的另一端连接于第一三极管q1集电极;所述第一继电器km1包括第一线圈、常开触点km1-1,第一线圈的一端接地,第一线圈的另一端连接于电源vcc;常开触点km1-1的一端连接于电源vcc,常开触点km1-1的另一端连接于第三电阻器r3;所述延时单元,其输入端与led和第一三极管q1集电极的连接点相连接,其输出端连接于电源vcc与第一线圈之间;所述第三电阻器r3,一端与常开触点km1-1相连接,另一端与第二三极管q2基极相连接;以及,所述第二三极管q2,基极与第三电阻器r3相连接,发射极接地,集电极连接于驱动电机的供电回路中。
15.通过采用上述技术方案,当比较器a输出高电平,第一三极管q1导通,延时单元导通,led亮,同时第一继电器km1的第一线圈得电,且常开触点km1-1闭合,第二三极管q2导通,驱动电机开启。
16.可选的,所述延时单元包括延时继电器kt1,延时继电器kt1包括延时线圈、延时闭合的常开触点kt1-1,延时线圈的一端连接于第一三极管q1集电极,延时线圈的另一端连接于led;延时闭合的常开触点kt1-1的一端连接于电源vcc,延时闭合的常开触点kt1-1的另一端连接于第一线圈。
17.通过采用上述技术方案,当比较器a输出高电平,第一三极管q1导通,延时继电器kt1得电,同时led亮,且延时闭合的常开触点kt1-1延时闭合,第一继电器km1的第一线圈得
电。
18.可选的,所述第一线圈连接有蜂鸣器,所述蜂鸣器为有源蜂鸣器,所述蜂鸣器的一端连接于第一线圈,另一端接地。
19.通过采用上述技术方案,当比较器a输出高电平,第一三极管q1导通,延时继电器kt1得电,且延时闭合的常开触点kt1-1延时闭合,蜂鸣器开启,从而能够更好的呼叫工作人员。
20.综上所述,本技术包括以下至少一种有益技术效果:1.通过利用重锤的重力,使连接绳能够保持竖直状态,且当围护变形产生朝向背离基坑内壁的方向倾斜时,重锤与围护之间的距离变产生变化,从而检测装置能够检测到距离变化,进而控制警示机构开启,警示机构能够提醒工作人员前来查看维护,便于监测。
21.2.距离传感器实时检测重锤与围护之间的距离,并将检测到的距离以距离检测信号形式发出,比较电路接收距离检测信号后通过转换成相应的距离检测值,并与距离基准值比较之后输出比较信号,控制电路接收该比较信号,并控制驱动电机启闭。
附图说明
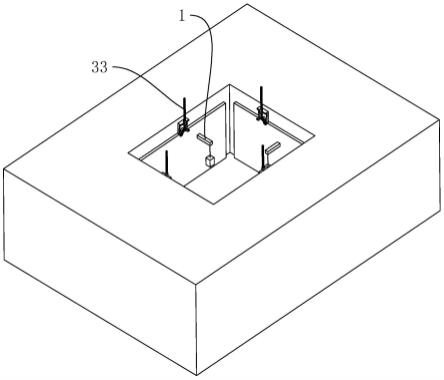
22.图1是本技术实施例的整体结构示意图。
23.图2是本技术实施例中围护的结构示意图。
24.图3是本技术实施例中弧形块的结构示意图。
25.图4是本技术实施例中检测装置的电路图。
26.附图标记说明:1、支杆;11、连接绳;12、重锤;2、检测装置;3、警示机构;31、支架;32、限位块;33、升降杆;34、led;4、驱动组件;41、驱动电机;42、连接杆;43、驱动块;44、弧形块;45、延伸块;46、连通槽;21、距离传感器;22、比较电路;23、控制电路;24、延时单元。
具体实施方式
27.以下结合附图1-4对本技术作进一步详细说明。
28.本技术实施例公开一种深基坑围护结构变形远程监控系统。参照图1与图2,一种深基坑围护结构变形远程监控系统包括设置于围护内侧的支杆1,支杆1呈水平设置,且支杆1背离围护的一端固定有连接绳11,连接绳11下端固定有重锤12,从而使连接绳11保持绷直状态。重锤12固定有用于检测围护变形的检测装置2。围护设置有用于警示人员的警示机构3,当检测装置2检测到围护变形时,可控制警示机构3开启,从而警示人员前来查看。
29.参照图2,警示机构3包括焊接于围护上端的支架31,支架31呈竖直设置,且支架31侧壁焊接有呈水平的限位块32,限位块32焊接于支架31上端,且限位块32沿纵向滑移穿设有呈竖直的升降杆33,升降杆33上端粘接有led34,围护设置有用于驱动升降杆33往复升降的驱动组件4。
30.参照图3,驱动组件4包括通过螺钉固定于围护上端的驱动电机41,驱动电机41输出轴呈水平设置,且驱动电机41输出轴固定有呈竖直的连接杆42,连接杆42背离驱动电机41输出轴的一端焊接有呈水平的驱动块43,驱动块43呈圆柱状设置,驱动块43位于连接杆42背离驱动电机41的一侧设置。
31.参照图3,升降杆33下端焊接有呈弧形的弧形块44,弧形块44的弧形凹侧朝向下方设置,且弧形块44的弧形半径等于连接杆42的长度。弧形块44的两端分别一体成型有延伸块45,延伸块45与弧形块44朝向驱动块43的一侧侧壁均开设有供驱动块43滑移穿设的连通槽46。当升降杆33上端处于最高处时,驱动块43的转动轴心与弧形块44的圆心同心,同时驱动电机41驱动连接杆42转动,使驱动块43滑移于连通槽46内,从而驱动块43能够带动弧形块44往复移动,使升降杆33能够往复升降,进而能提醒工作人员。
32.参照图2与图4,检测装置2包括距离传感器21、比较电路22以及控制电路23,距离传感器21固定于重锤12朝向围护的一侧侧壁,且距离传感器21为正系数传感器,用于实时检测重锤12与围护之间的距离变化并输出距离检测信号。
33.参照图4,比较电路22包括比较器a与基准电路,基准电路包括第一电阻器r1、第二电阻器r2,用于设置距离基准值,此处距离基准值为当支杆1呈水平状态时,重锤12与围护之间的距离。其中比较器a的正相输入端与距离传感器21输出端相连接,反相输入端与第一电阻器r1相连接;第一电阻器r1,一端与比较器a反相输入端相连接,另一端连接于电源vcc;第二电阻器r2,一端接地,另一端与第一电阻器r1和比较器a反相输入端的连接点相连接。比较器a接收距离检测信号后将距离检测信号实时转换成相应的距离检测值,并将距离检测值与距离基准值进行比较;当距离检测值大于距离基准值时,比较器a输出高电平。
34.参照图4,控制电路23包括第一三极管q1、延时单元24、第一继电器km1、第三电阻器r3、第二三极管q2;其中,第一三极管q1为npn型三极管,第一三极管q1的基极与比较器a输出端相连接,发射极接地;led34的一端连接于电源vcc,led34的另一端连接于第一三极管q1集电极;第一继电器km1包括第一线圈、常开触点km1-1,第一线圈的一端连接于电源vcc,第一线圈的另一端连接有蜂鸣器,蜂鸣器为有源蜂鸣器,蜂鸣器的一端连接于第一线圈,另一端接地;常开触点km1-1的一端连接于电源vcc,常开触点km1-1的另一端连接于第三电阻器r3;参照图4,延时单元24包括延时继电器kt1,延时继电器kt1包括延时线圈、延时闭合的常开触点kt1-1,延时线圈的一端连接于第一三极管q1集电极,延时线圈的另一端连接于led34;延时闭合的常开触点kt1-1的一端连接于电源vcc,延时闭合的常开触点kt1-1的另一端连接于第一线圈。第三电阻器r3,一端与常开触点km1-1相连接,另一端与第二三极管q2基极相连接;第二三极管q2,基极与第三电阻器r3相连接,发射极接地,集电极连接于驱动电机41的供电回路中。当比较器a输出高电平,第一三极管q1导通,延时继电器kt1得电,同时led34亮,且延时闭合的常开触点kt1-1延时闭合,第一继电器km1的第一线圈得电,同时蜂鸣器开启,且常开触点km1-1闭合,第二三极管q2导通,驱动电机41开启。
35.本技术实施例的实施原理为:当围护变形倾斜时,由于连接绳11在重锤12的重力作用下,会始终绷直,从而重锤12与围护之间的距离会增大,使距离传感器21检测到距离变化并输出距离检测信号,比较器a接收距离检测信号,当距离检测值大于距离基准值时,比较器a输出高电平,第一三极管q1导通,延时继电器kt1得电,同时led34亮,且延时闭合的常开触点kt1-1延时闭合,第一继电器km1的第一线圈得电,同时蜂鸣器开启,且常开触点km1-1闭合,第二三极管q2导通,驱动电机41开启;从而驱动块43在连通槽46内滑移,进而驱动弧形块44上下移动,使升降杆33能够上下移动并伸出基坑,同时led34亮以及蜂鸣器报警,从而能够更加明显的提醒工作人员对应围护产生变形。
36.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1