深海智能式抓斗的制作方法
1.本发明涉及海洋科考设备技术领域,具体为深海智能式抓斗。
背景技术:
2.目前水下观测和取样多采用主动式寻找,根据观测到的图像信息,来人为操作推进器,使得设备移动,其缺点在于无法智能分析得到的参数,然后根据得到的数据智能的规划移动路径,也无法确定自身的位置和移动过的轨迹,即是设备不能够自主移动。为克服现有技术中存在的不足,需要设计一台能自动寻找海底热液喷口,具有简单、廉价、操作性强、可通过光电复合缆控制的深海交互式采样系统有机结合电视抓斗和rov等功能的设备,将多种作业功能集于一体,能在水下6000米的环境进行作业。
3.现有技术公开的一种基于水下rov的多管振动取样钻机(cn109030072a),该发明实现了钻机水下换管的功能,增加了rov可携带的沉积物数量;机架、移动平台和液压缸推杆上的钢丝绳滑轮组大大减少了液压油缸的所需行程,降低了钻机整体的高度;钻进方式采用液压振动,对沉积物的干扰极小,钻机的钻进、换管机构都采用液压动力,使钻机可在深海4500米海底工作;但其无法智能分析得到的参数,然后根据得到的数据智能的规划移动路径,也无法确定自身的位置和移动过的轨迹。
技术实现要素:
4.本发明的目的在于提供深海智能式抓斗,以解决无法智能分析得到的参数,然后根据得到的数据智能的规划移动路径,也无法确定自身的位置和移动过的轨迹的问题。
5.为实现上述目的,本发明提供如下技术方案:深海智能式抓斗,包括,上框架,上框架具有方形框架结构,上框架的内部设有推进器,推进器对称设置有两个,上框架的侧棱上铰接有导流组件,导流组件靠近推进器的尾部设置,上框架内部设有推进器驱动舱,推进器驱动舱设于两个推进器之间,导流组件具有方筒体结构,导流组件包括导流侧板和导流主板,两个导流组件的导流主板相对设置,导流组件的两对立侧面之间设有第一连接板,第一连接板的内侧面轴接有导流件,导流侧板上开设有若干个导流孔,导流件具有转轴,转轴的侧面周向设有若干个内支撑杆,内支撑杆的另一端部固定连接有外固定圈,外固定圈沿转轴同轴设有三个,外固定圈上设有导流叶板,导流叶板具有流线型曲面结构;该深海智能式抓斗配备有水下专用防水蓄电池,以实现对装置中各电子器件进行供电,其能够通过传感器集成体,根据需要测量出水中的物质参数,随后根据参数的异常,自动启动推进器,沿着浓度越来越大的路径移动,寻找深海热液喷口,其也能够通过摄像头和水下灯在深海进行观测,并根据需要在深海进行取样;该深海智能式抓斗设有的两个推进器,分别具有独立的控制和传动系统,可以通过改变两个推进器的转速差,来实现装置的转向功能;该深海智能式抓斗利用导流组件来对每个推进器工作时,其尾部推动水流产生的旋流进行导向,使旋流集中地向两个导流组件之间的位置移动,从而能够提高推进器的推进效果,具体地,旋流与导流主板接触的过程中,旋流能够快速地通过导流主板表面,后
方水体对装置的反作用力增大,实现了旋流对装置的快速推进;装置在前进时,导流侧板附近的水流向后流动,部分水流能够通过导流侧板上的导流孔流入,从而使水流与导流件接触,导流孔可以消耗水流能量,能够避免装置在前进过程中,周围水体由于具有较大的压强而挤压导流组件,使导流组件发生摆动,影响装置的平衡性;装置周围的水流能够带动导流件形成旋转运动,随着水流的流进和流出,能够对导流组件内部起到清洗作用;也能够利用导流件产生的旋流来避免水生生物附着到导流组件上,影响其正常功能;导流孔以及导流件的设计也能够加强装置的缓冲效果,当有物体从推进器方向撞击装置时,导流组件中的导流孔和导流件可以起到吸收撞击力的效果,也进一步避免推进器被破坏,造成装置彻底无法行动的问题。
6.上框架的下方螺接有下框架,下框架具有方形框架结构,下框架的上部设有安装基体,安装基体与上方的上框架通过液压机构连接,安装基体上通过液压杆件铰接有取样斗体;利用液压技术在水下作业设备中的独特优势,采用液压传动技术对取样斗体的水下作业进行控制,液压机构配合取样斗体、摄像头、水下灯等部件,可以在深海中实现可视化采样。
7.下框架的侧面设有防护组件,防护组件具有防护主板,防护主板的侧面与下框架的侧面固定连接,防护主板的另一侧面上设有防护支撑板,防护支撑板设于防护主板的中垂面处;防护组件上还设有防护弯板,防护弯板的两端部分别与防护主板的两端部固定连接,防护弯板上开设有通孔,防护弯板的外弧面上还设有防护延伸板,防护延伸板上也开设有通孔;下框架的侧面设有的防护组件能够对下框架的外侧起到碰撞防护作用,也能够防止水中的水草缠绕造成装置整体框架发生形变的问题发生,具体地,由于该深海智能式抓斗长时间处于水下作业,为了减少能源的消耗,和自身浮力的平衡,就需要保证其具有体积小、重量轻、负重能力强的硬性条件,所以该装置中所述的上框架和下框架等基础构件需优先选用轻质材料,或空心管体材料,它们都不具有很强的抗形变能力,若遇海底礁石撞击或被水草缠绕拉扯,都将使装置的整体框架发生形变,影响装置的正常运转;防护组件上的防护弯板和防护支撑板上的通孔能够消耗防护组件附近的水流能量,降低下框架所受到的水流冲击震动,避免取样斗体在工作时产生误差,影响精确化取样的功能实现。
8.上框架内部中心位置设有吊装架,吊装架的一侧设有压力补偿器,吊装架的另一侧设有阀体控制舱,吊装架的另一侧设有控制舱,吊装架的另一侧设有液压站,上框架的一侧棱上设有摄像头,摄像头的下方设有水下灯,上框架的一侧棱上设有传感器集成体,液压站的下方设有变压器舱;通过安装浊度传感器、化学传感器、甲烷传感器等集成体,并搭载ctd,实现海底环境多参数全方位探测,具体地,例如利用该深海智能抓斗对海底的热液异常进行智能搜索,并且通过热液羽状流(热液羽状流是公认的确定热液喷口存在的可靠证据之一)在与周围海水交换过程中形成各种物理、化学特征参数梯度,随着热液羽状流的扩散,梯度变化明显,从而找到热液喷口的存在;压力补偿器可以使水下液压系统适应不同海水深度下的作业要求。
9.与现有技术相比,本发明的有益效果是:
1.该深海智能式抓斗,通过安装浊度传感器、化学传感器、甲烷传感器等集成体,并搭载ctd,实现海底环境多参数全方位探测,根据需要测量出水中的物质参数,随后根据参数的异常,自动启动推进器,沿着浓度越来越大的路径移动,寻找深海热液喷口,其也能够通过摄像头和水下灯在深海进行观测,并根据需要在深海进行取样;2.该深海智能式抓斗,通过导流组件来对每个推进器工作时,其尾部推动水流产生的旋流进行导向,使旋流集中地向两个导流组件之间的位置移动,从而能够提高推进器的推进效果;3.该深海智能式抓斗,通过导流件形成的旋转运动,随着水流的流进和流出,能够对导流组件内部起到清洗作用,也能够利用导流件产生的旋流来避免水生生物附着到导流组件上,影响其正常功能;4. 该深海智能式抓斗,通过下框架的侧面设有的防护组件能够对下框架的外侧起到碰撞防护作用,也能够防止水中的水草缠绕造成装置整体框架发生形变的问题发生。
附图说明
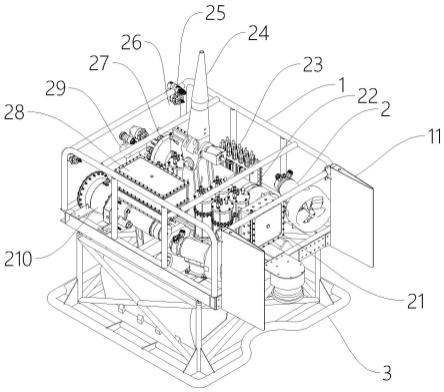
10.图1为本发明提供的深海智能式抓斗的一种较佳实施例的结构示意图;图2为本发明的另一方位结构示意图;图3为图1所示上框架及其内部结构示意图;图4为图1所示下框架及其内部结构示意图;图5为图1所示导流组件的结构示意图;图6为图5所示导流件的结构示意图;图7为图4所示防护组件的结构示意图。
11.图中:1、上框架;11、导流组件;12、导流侧板;13、导流主板;14、导流孔;15、导流件;16、第一连接板;17、转轴;18、内支撑杆;19、外固定圈;110、导流叶板;2、推进器;21、推进器驱动舱;22、压力补偿器;23、阀体控制舱;24、吊装架;25、摄像头;26、水下灯;27、控制舱;28、液压站;29、传感器集成体;210、变压器舱;3、下框架;31、取样斗体;32、安装基体;33、防护组件;34、防护主板;35、防护支撑板;36、防护弯板;37、防护延伸板;38、通孔;39、液压杆件。
具体实施方式
12.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
13.请参阅图1-3、图5、图6,本发明提供的一种实施例:深海智能式抓斗,包括,上框架1,上框架1具有方形框架结构,上框架1的内部设有推进器,推进器对称设置有两个,上框架1的侧棱上铰接有导流组件11,导流组件11靠近推进器的尾部设置,上框架1内部设有推进器驱动舱21,推进器驱动舱21设于两个推进器2之间,导流组件11具有方筒体结构,导流组件11包括导流侧板12和导流主板13,两个导流组件11的导流主板13相对设置,导流组件11的两对立侧面之间设有第一连接板16,第一连接板16的内侧面轴接有导流件15,导流侧板
12上开设有若干个导流孔14,导流件具有转轴17,转轴17的侧面周向设有若干个内支撑杆18,内支撑杆18的另一端部固定连接有外固定圈19,外固定圈19沿转轴17同轴设有三个,外固定圈19上设有导流叶板110,导流叶板110具有流线型曲面结构;该深海智能式抓斗配备有水下专用防水蓄电池,以实现对装置中各电子器件进行供电,其能够通过传感器集成体29,根据需要测量出水中的物质参数,随后根据参数的异常,自动启动推进器2,沿着浓度越来越大的路径移动,寻找深海热液喷口,其也能够通过摄像头25和水下灯26在深海进行观测,并根据需要在深海进行取样;该深海智能式抓斗设有的两个推进器2,分别具有独立的控制和传动系统,可以通过改变两个推进器2的转速差,来实现装置的转向功能;该深海智能式抓斗利用导流组件11来对每个推进器2工作时,其尾部推动水流产生的旋流进行导向,使旋流集中地向两个导流组件11之间的位置移动,从而能够提高推进器2的推进效果,具体地,旋流与导流主板13接触的过程中,旋流能够快速地通过导流主板13表面,后方水体对装置的反作用力增大,实现了旋流对装置的快速推进;装置在前进时,导流侧板12附近的水流向后流动,部分水流能够通过导流侧板12上的导流孔14流入,从而使水流与导流件15接触,导流孔14可以消耗水流能量,能够避免装置在前进过程中,周围水体由于具有较大的压强而挤压导流组件11,使导流组件11发生摆动,影响装置的平衡性;装置周围的水流能够带动导流件15形成旋转运动,随着水流的流进和流出,能够对导流组件11内部起到清洗作用;也能够利用导流件15产生的旋流来避免水生生物附着到导流组件11上,影响其正常功能;导流孔14以及导流件15的设计也能够加强装置的缓冲效果,当有物体从推进器方向撞击装置时,导流组件11中的导流孔14和导流件15可以起到吸收撞击力的效果,也进一步避免推进器被破坏,造成装置彻底无法行动的问题。
14.请参阅图1、图2、图4,上框架1的下方螺接有下框架3,下框架3具有方形框架结构,下框架3的上部设有安装基体32,安装基体32与上方的上框架1通过液压机构连接,安装基体32上通过液压杆件39铰接有取样斗体31;利用液压技术在水下作业设备中的独特优势,采用液压传动技术对取样斗体31的水下作业进行控制,液压机构配合取样斗体31、摄像头25、水下灯26等部件,可以在深海中实现可视化采样。
15.请参阅图1、图4、图7,下框架3的侧面设有防护组件33,防护组件33具有防护主板34,防护主板34的侧面与下框架3的侧面固定连接,防护主板34的另一侧面上设有防护支撑板35,防护支撑板35设于防护主板34的中垂面处;防护组件33上还设有防护弯板36,防护弯板36的两端部分别与防护主板34的两端部固定连接,防护弯板36上开设有通孔38,防护弯板36的外弧面上还设有防护延伸板37,防护延伸板37上也开设有通孔38;下框架3的侧面设有的防护组件33能够对下框架3的外侧起到碰撞防护作用,也能够防止水中的水草缠绕造成装置整体框架发生形变的问题发生,具体地,由于该深海智能式抓斗长时间处于水下作业,为了减少能源的消耗,和自身浮力的平衡,就需要保证其具有体积小、重量轻、负重能力强的硬性条件,所以该装置中所述的上框架1和下框架3等基础构件需优先选用轻质材料,或空心管体材料,它们都不具有很强的抗形变能力,若遇海底礁石撞击或被水草缠绕拉扯,都将使装置的整体框架发生形变,影响装置的正常运转;防护组件33上的防护弯板36和防护支撑板35上的通孔38能够消耗防护组件33附近的水流能量,降低
下框架3所受到的水流冲击震动,避免取样斗体31在工作时产生误差,影响精确化取样的功能实现。
16.请参阅图1、图2,上框架1内部中心位置设有吊装架24,吊装架24的一侧设有压力补偿器22,吊装架24的另一侧设有阀体控制舱2723,吊装架24的另一侧设有控制舱27,吊装架24的另一侧设有液压站28,上框架1的一侧棱上设有摄像头25,摄像头25的下方设有水下灯26,上框架1的一侧棱上设有传感器集成体29,液压站28的下方设有变压器舱210;通过安装浊度传感器、化学传感器、甲烷传感器等集成体,并搭载ctd,实现海底环境多参数全方位探测,具体地,例如利用该深海智能抓斗对海底的热液异常进行智能搜索,并且通过热液羽状流(热液羽状流是公认的确定热液喷口存在的可靠证据之一)在与周围海水交换过程中形成各种物理、化学特征参数梯度,随着热液羽状流的扩散,梯度变化明显,从而找到热液喷口的存在;压力补偿器22可以使水下液压系统适应不同海水深度下的作业要求。
17.工作原理:首先需要创建一个船载控制平台用于远程控制该深海智能式抓斗,船载控制平台由船载水下设备操控箱和数据管理与信息集成模块组成,其中,数据管理与信息集成模块包括数据采集、存储与处理、多路视频显示、导航与定位显示、热液异常智能搜索、交互式运动控制等系统;本装置具有两种水下运动控制模式,即手动遥控模式和自动控制模式,其分别如下所述:1.手动遥控模式:操控员在操控室通过操作水下设备操控箱,分别控制两个推进器2的开关及转速,实现对该装置的航速和航向的控制,根据水下传感器反馈的深度信息,操控员通过操纵绞车对系于该装置上的缆绳进行收放,控制该装置距海底的深度。
18.2.自动控制模式:由计算机控制系统来自动控制该装置的精确运动,需要首先对水下子系统进行动力学与运动学分析,建立该装置在深海复杂动力学环境中的动力学与运动学机理模型,研究并确定航速、航向的实时精确控制方案;对控制性能进行计算机仿真,优化控制方案;进而开发船载运动控制软件实现对水下该装置携带的子系统的交互式精确运动控制,从而使该装置能够进行精细化采样。
19.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1