一种长基线无人机SAR三维成像方法
一种长基线无人机sar三维成像方法
技术领域
1.本发明涉及一种长基线无人机sar三维成像方法,可应用于星载、机载层析sar成像等领域,可以克服高度维长基线引起的目标徙动过大而无法配准的问题,从而大幅增强sar三维成像能力。
背景技术:
2.层析合成孔径雷达(tomosar)通过在高度维合成孔径,获取第三维的分辨能力,通过恢复目标真实的三维(3d)空间信息,避免了叠掩和顶底倒置问题,从而优于传统的二维(2d)sar成像。无人机(uav)是未来机载tomosar重要发展方向[8,9],特别是小型uav,其部署快、飞行灵活,在城市三维重建、城市管理、危情检测等方面具有广阔的应用前景。
[0003]
分辨率是评判成像性能的重要指标之一。tomosar的高程分辨率可以表示为,
[0004]
ρ
sr
=σρs[0005]
其中ρs表示瑞利分辨率,σ为超分辨因子。
[0006]
瑞利分辨率与基线孔径的长度成正比。超分辨率因子由信噪比、采样数量、目标散射特征等因素决定。在给定超分辨率因子的情况下,提升高程分辨率的方式是增大高程孔径。但是,随着高程基线长度的增加,图像的几何一致性会变差,即同一目标会被置于不同的成像位置。例如,原本叠掩的目标将在两幅图像中出现在不同的距离-方位单元,这种现象在机载tomosar中尤其普遍。这种情况下,基于图像配准的传统tomosar处理会失败。
技术实现要素:
[0007]
本发明提出一种长基线无人机sar三维成像方法,解决了在三维层析成像中,由于观测孔径基线过长导致成像几何不一致,使得成像结果配准失败传统处理方法失效的问题。
[0008]
本发明通过以下技术方案实现。
[0009]
一种长基线无人机sar三维成像方法,包括:
[0010]
步骤一、通过对目标进行几何定位,得到目标成像位置,获得高程信号;
[0011]
步骤二、将获得的所述高程信号乘以去斜信号滤波器,去除信号高阶相位,若格点存在目标,则其信号频谱峰值搬移至零频位置处,利用cs估计信号频谱完成目标位置估计;
[0012]
步骤三、根据所述目标位置估计信息,利用最小二乘法进行目标幅度、相位散射信息的重建。
[0013]
本发明的有益效果:
[0014]
本发明与传统方法相比,该方法利用成像几何关系实现高程信号的精确提取,避免了二维图像配准。通过计算机仿真和p波段无人机tomosar实验结果表明,该方法比传统方法具有更高的精度。
附图说明
[0015]
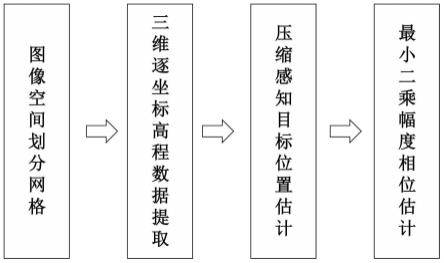
图1为本发明长基线无人机sar三维成像方法流程图;
[0016]
图2为本发明具体实施方式中空间目标在成像平面上的几何投影关系图;
[0017]
图3为本发明具体实施方式中不同采样高度情况下的徙动情况及成像结果对比图;
[0018]
图4为本发明具体实施方式中逐格点tomosar成像一维信号仿真结果对比图;
[0019]
图5为本发明具体实施方式中长基线面目标仿真结果对比图;
[0020]
图6为本发明具体实施方式中面目标三维成像仿真结果对比图;
[0021]
图7为本发明具体实施方式中不同高度采样成像结果对比图;
[0022]
图8为本发明具体实施方式中角反三维成像结果对比图;
[0023]
图9为本发明具体实施方式中建筑区域不同高度采样成像结果对比图;
[0024]
图10为本发明具体实施方式中楼房区域成像结果相干性对比图;
[0025]
图11为本发明具体实施方式中三维成像结果对比图;
[0026]
图12为本发明具体实施方式中楼房区域三维成像结果误差对比(lidar为标准)图。
具体实施方式
[0027]
下面结合附图对本发明做详细说明。
[0028]
如图1所示,本发明具体实施方式的长基线无人机sar三维成像方法,具体包括以下步骤:
[0029]
步骤一、通过对目标进行几何定位,得到目标成像位置,获得高程信号;
[0030]
本实施例中,所述信号几何定位利用散射体与成像平台之间的成像几何关系实现目标几何定位;对于长基线孔径,目标对应的成像位置由等距离-多普勒方程计算获取;这一步骤的提取方式能够避免二维图像配准。
[0031]
如图2所示目标在成像平面的投影关系,p为散射点,p’为目标p在成像平面的位置,o为p正侧视照射时的方位位置,o’为o在成像平面上的位置,x为雷达平台的速度方向,y为距离向,z为天向。从雷达成像原理可知,在sar成像中,投影点p’和p应具有相同的斜距和多普勒。因此,利用斜距-多普勒方程,完成p’(x,y)的求解。
[0032][0033]
在正侧条带成像模式中,fdc=0,因此认为多普勒平面是一个过oo’和p且垂直于成像面的平面。假设p坐标为(pa,pb,pc),则p’是
[0034][0035]
其中f(x)表示成像平面中o’p’的线性方程,其为成像平面与多普勒平面的交线。因此,x可表示为
[0036]
(1+k2)x2+2(kb-p
a-kpb)x-con=0
[0037][0038]
x的解如下式所示,带入直线方程可以得到目标的成像位置p’坐标。
[0039][0040]
经过几何定位后,得到p的成像位置。
[0041]
具体实施时,在上述几何定位得到p的成像位置结果后,该结果通常不会恰好落入2d成像的格点中。因此,为了准确获取该坐标位置的图像信息,本实施例进一步进行双线性插值操作,对多航过数据重复上述步骤,最终完成高程信号向量的获取。
[0042]
步骤二、将获得的所述高程信号乘以去斜信号滤波器,去除信号高阶相位,若格点存在目标,则其信号频谱峰值搬移至零频位置处,利用cs估计信号频谱完成目标位置估计;
[0043]
这一步骤的实现原理是:由于逐格点构建参考信号完成去斜处理,因此对应位置处高程回波信号残余高阶项非常小,相较于传统方法可获得更准确的频谱估计结果。
[0044]
现有技术中的去斜(dechirp)处理中高程仅与垂直基线有关,存在降低恢复效能的隐患;而本实施例中高程信号的提取是利用已知空间网格进行目标定位后插值获得,因此对于三维成像格点而言,其高程信息可认为准确已知,故可基于该成像网格实现对参考信号的精确构建,而在该构建过程中没有任何近似,不存在残余相位和平行基线的影响。
[0045]
因此本实施例中,去斜后的信号公式如下:
[0046][0047]
其中,gn为第n个图像去斜后高程信号,hn为未去斜处理的原始高程信号,α(s)为目标的复散射信息(包含幅度、相位),r
bn
为目标在第n幅图像中的斜距,s为目标实际高程,s
ref
为构建去斜信号时的参考高程,b
⊥n是第n次观测时的垂直基线,将该式进行离散化和矩阵化并考虑测量噪声,表示为如下形式:
[0048]
g=lα+ε
[0049]
其中,g是由[g1,g2,
…
,gn]
t
构建的高程信号矢量,ln×
l
=exp(-j2πξns
l
)为映射矩阵,为空间频率,ε为测量噪声。由于高程目标的稀疏性,则上述公式的求解可转化为l1优化问题:
[0050][0051]
其中,是待估计的目标信息(位置、幅度、相位),|| ||2是2范数求解,|| ||1是1范数求解,该式可由cvx工具计算求解,但需要注意的是,该式结果通常可以准确获取目标位置信息,但无法保证幅度与相位信息的准确性,需要进一步估计。
[0052]
当目标存在(s=sref)时,去斜处理后其信号频谱峰值会出现在零频位置。因此根据cs估计结果中的峰值位置是否在零频来判断当前格点是否存在目标。
[0053]
步骤三、根据所述目标位置估计信息,利用最小二乘法进行目标幅度、相位散射信息的重建;具体为:
[0054]
3.1根据所述目标位置估计信息构造映射矩阵l;
[0055]
所述l大小为n
×
1,具体为,
[0056]
3.2利用最小二乘法求解的幅度、相位散射信息;具体公式如下:
[0057][0058]
实施例1:
[0059]
对高程长基线下存在的问题与本方法进行了计算机仿真验证。仿真参数如表1所示。
[0060]
表1仿真关键参数
[0061]
参数值单位波段p-带宽60mhz距离550-1000mprf≈52.08hz速度≈8m/s高度170-260m
[0062]
首先,仿真验证了叠掩目标在长基线层析观测中存在明显的徙动问题。两个目标的位置分别为a(700m,0,30m),b(691m,0,0)。在170-260m的高度区间进行观测采样,中心高度(215m)对应的斜距为716m,叠掩目标高度差为7.96m时徙动可忽略。a点仿真幅度设置为1,对应b幅度为0.6。采样高度170m、215m和260m时的成像结果如图3所示。图3(a)为高程徙动与距离分辨率的对比结果,可以看到长基线观测下,很容易出现目标徙动过大,超出一个距离分辨单元,此时叠掩目标将不在重叠,如图3(b)-(d)所示。这种现象会导致图像无法配准,高程信号提取不准确,最终影响层析成像质量。
[0063]
图4为所提方法在非均匀采样情况不同目标估计方法结果对比。在观测量比较充足时,可以采用时域算法获得长基线采样情况下的3d成像结果。然而,时域算法容易因采样位置稀疏且不均匀而导致成像质量恶化,如图4所示。基于truncated svd的目标估计相对于时域算法具有更低的旁瓣,但分辨率几乎相同。基于cs的成像结果中,旁瓣被去除,分辨性能有明显改善,故选用cs算法作为所提方法的目标估计解决方案。在本次仿真中,分辨率设置为4m,目标间隔为4m,信噪比为10db。
[0064]
为进一步验证所提方法的有效性,对面目标进行了仿真。在高度170m到260m之间共均匀采样30次。面目标高差为30m,如图5(a)所示。采样高度为170m和215m时的成像结果分别如图5(b)和(c)所示。由于观测基线过长,叠掩的目标发生了变化,叠掩区域产生偏移,出现如图3所示的错位问题,相干性显着降低,如图5(d)所示。这将导致后续的高程估计产生错误。
[0065]
面目标仿真的时域方法、传统方法和所提方法的3d成像结果如图6所示。由于仿真
中采样是均匀的,所以时域算法能够有效成像,但是分辨率性能明显较差。由于长基线导致的高程徙动问题,导致传统基于配准处理的方法无法有效恢复中间区域,底面与顶面边缘未能对齐。但是,所提方法可以有效解决长基线情况下的三维成像问题,有效恢复目标,如图6(c)所示。
[0066]
实施例2:p波段无人机tomosar实验
[0067]
于2021年3月从中国重庆通航学院成功采集了无人机tomosar实验数据。系统工作在p波段,参数和表1一致。在高度170-260m之间共采集了30轨数据。系统下视角θ=70
°
,场景中心斜距为656.2m,基线长度δb约为90m,此时对应的高程分辨率ρs为2.54m。
[0068]
图7为长基线观测下的干涉结果。分别展示了距离主图像最近与最远采样的相干系数图和干涉图。在长基线孔径下,图像的相干性下降严重,仅有小部分建筑区域可以保持较强的相干性。
[0069]
在球场中心区域放置了一个边长1.1m的三角形角反,用其进行算法性能评估。时域算法、传统方法和所提方法的处理结果如图8所示。角反的高度估计结果为-8m,三种算法的估计结果一致。与时域算法相比,传统方法和所提方法在高度向上具有显著的超分辨率性能。由于角反周围没有遮挡,不存在叠掩问题,因此传统基于配准的处理方法依然有效。时域算法结果中,高度向分辨率为2.62m,峰值旁瓣比为-14.01db,积分旁瓣比为-10.32db。
[0070]
图9为建筑目标sar成像结果。图9(a)、(b)和(c)分别为高度为219m、216m和174m时的成像结果。图9(a)为参考主图像。图10(b)和(c)分别是离主图像最近和最远的成像结果。图9显示,在长基线观测下,由于几何不一致性,建筑物的散射情况发生了显着变化,如红色框选区域。这将导致配准后提取的目标不再准确,影响高程估计结果。
[0071]
图10显示了配准后的图像相干情况。图10(a)和(b)分别是最近与最远采样时与主图像的相干系数图。受长基线孔径的影响,在相距较远的一组相干图中,相干性明显恶化。这将影响传统方法的处理质量。
[0072]
图11比较了传统方法和所提方法的处理结果。两种方法都可以恢复屋顶结构。但是,在传统方法中,虽然可以反映屋顶部分的倾角,但同一分辨单元内的目标会因高程徙动导致叠掩关系出现变动,最终在估计结果中出现大量“噪点”,图像质量受到严重限制。在所提方法中,利用投影关系完成高程信号搜索,目标高程回波获取的准确性大幅提升,图像噪点大大减少。估算精度显著提高,建筑物屋顶坡度变化清晰可见,图像熵从14.0796降低至11.5432,可见所提方法可以获取更高的图像质量。
[0073]
将估计结果与lidar数据进行对比,估计误差分析结果如图13所示。为了便于比较和展示,图12(a)和(b)使用了相同的颜色量化间隔。经统计计算,所提方法将建筑高度反演误差的均值由1.8721m减小到0.5698m,标准差由1.8363m减小到1.2023m。可以看出,本发明提出的方法具有更准确、更稳定的估计结果。综上所述,本发明可以有效解决长基线孔径下的层析成像问题,获得高质量的三维成像结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1