车辆平衡控制方法及系统与流程
1.本发明涉及一种车辆技术领域,尤指车辆行进或过弯时,来平衡车体的技术范畴。
背景技术:
2.一般车辆,尤如电动三轮车,其藉由电动磁制动器驱动行驶,因此行车速度较快,但由于其车体在过弯时,位于该车体外侧的后轮会因承受较大的离心力,而容易产生转向不足,致该车体会倾倒而发生危险。
3.为了避免上述情况发生,故有业者会将一差速器运用于电动三轮车的后轮组转轴,以平衡其车体过弯时所引起人、车、物倾倒的离心力;然而,一般差速器主要是以行星齿轮机构所组成,其制造成本高。
4.另,亦有业者以机械装置配合数缓冲件,开发出中国台湾专利第i549857号「三轮车的耦合机构」,以平衡电动三轮车过弯时所引起人、车、物倾倒的离心力;然而,该耦合机构均为机械式元件,且零件众多又构造复杂,故其制造成本高昂;因此,三轮车现有的平衡系统或装置,实有需要改善。
技术实现要素:
5.本发明的主要目的在于提供以电控方式配合简易机构来平衡行驶或过弯中车体的控制方法及系统;本发明的次要目的在于提供行车舒适度佳的一种车辆平衡控制方法及系统;本发明的另一目的在于提供多种行车模式的一种车辆平衡控制方法及系统。
6.本发明为达上述目的,运用了如下技术手段:
7.关于本发明一种车辆平衡控制方法,包含下述步骤:一车体模块化步骤,将一车体区分有一第一车体及一第二车体,其中在该第一车体、第二车体之间接设有一倾斜功能模块,又该倾斜功能模块受一微控器控制;一感测单元建置步骤,将数个感测单元安装于前述车体,其中该感测单元更包含有一刹车、一轮速或/及一角度的传感器;一电控模块建置步骤,以一微控器电性连接及感测单元,以便收集一刹车信号、一轮速信号或/及一角度信号,以利演算;及一平衡控制步骤,经由该微控器的运算结果来控制该倾斜功能模块;藉由上述步骤,当车辆行驶或过弯中,该微控器会依据该刹车、轮速或/及角度的信号,令该倾斜功能模块来制动调整该第一车体、第二车体之间的倾斜角度(θ)变化的阻尼系数。
8.所述车辆平衡控制方法,其中在该车体模块化步骤中,将该倾斜功能模块、车体之间设有一回复弹簧,又该回复弹簧提供被倾斜车体的回复力,另将该倾斜功能模块设为一制动器,并藉由该制动器的助力/阻力来调整该车体往复时的阻尼系数。
9.所述车辆平衡控制方法,其中在该感测单元建置步骤中,增设一用户选择界面,该用户选择界面更包含有:一骑乘模式、一载重模式或/及一阻尼系数调整模式;而该微控器会依据该刹车信号、轮速信号、角度信号或/及用户选择界面信号,来控制该倾斜功能模块。
10.所述车辆平衡控制方法,其中在该车体模块化步骤中,将该倾斜功能模块的相应位置处设有一驻车锁定模块,且该驻车锁定模块受该微控器控制;另将该制动器设为磁制
动器。
11.所述车辆平衡控制方法,其中在该平衡控制步骤中,当该轮速、角度的信号为零时,则该微控器判断车体为驻车状态,且同时控制该驻车锁定模块;当该轮速信号不为零,该微控器则解除驻车模式;并依据该刹车、轮速、角度或/及用户选择界面的信号,来控制该倾斜功能模块;另当该车体的行驶或过弯的过程中,该微控器会依据该角度的信号,并藉由倾斜功能模块来调整该车体往复时的阻尼系数。
12.关于本发明一种车辆平衡控制系统,运用上述车辆平衡控制方法,其包含:一车体,包含有一第一车体及一第二车体;一倾斜功能模块,接设于该第一车体、第二车体之间;一微控器,电性连接该感测单元、倾斜功能模块;一感测单元,安装于车体上,据以感测一刹车信号、一轮速信号或/及一角度信号;及藉由该车体行驶或过弯中,该微控器会依据驻车、刹车、轮速或/及角度的信号,令该倾斜功能模块来制动调整该第一车体、第二车体之间的倾斜角度(θ)变化的阻尼系数。
13.所述车辆平衡控制系统,另包含有一回复弹簧,且该回复弹簧安装在该倾斜功能模块上,另将该倾斜功能模块设为一制动器,并藉由该制动器来调整该车体往复时的阻尼系数。
14.所述车辆平衡控制系统,另包含一驻车锁定模块与该微控器作电性连接,并设在该倾斜功能模块上;另将该制动器设为磁制动器。
15.所述车辆平衡控制系统,另包含一用户选择界面与该微控器作电性连接,其中该用户选择界面安装于第一车体上并输出一用户选择界面信号。
16.所述车辆平衡控制系统,其中该车体设为一电动三轮车及一电动三轮滑板车。
17.本发明藉由上述技术手段,可以达成如下功效:
18.1、本发明在该倾斜功能模块的转动路径上,设置有制动平衡该车体行驶中的倾斜力量(包含过弯离心力),据以提供控制不同车速下的倾斜(包含过弯倾斜),据以提升行车安全。
19.2、本发明利用该倾斜功能模块旋转拉伸该回复弹簧,以达成车身复位的功能,并避免造成行驶或过弯的过程中所引起车体倾斜过快的不适感。
20.3、本发明所设用户选择界面包含有:一骑乘模式、一载重模式或/及一阻尼系数调整模式,可以随者车上载物的多寡,以及依据使用者控制的经验,来提供自定义调整该倾斜功能模块及其回复车体的阻尼系数,可以帮助使用者更安全地操控该车体的倾斜程度。
附图说明
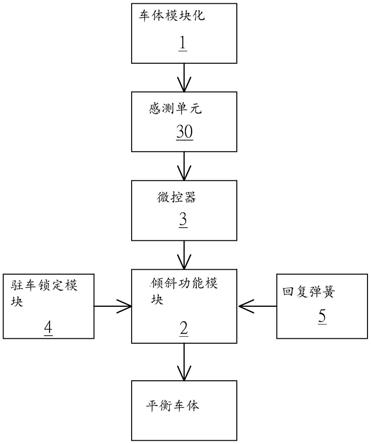
21.图1为本发明车辆平衡控制系统架构的方块图。
22.图2为本发明车辆平衡控制系统的电控方块图。
23.图3为本发明车辆平衡控制系统实施于电动三轮车的态样图。
24.图4为本发明车辆平衡控制系统的立体外观图。
25.图5为本发明车辆平衡控制系统的组合剖面图。
26.图6为本发明车辆平衡控制系统的平衡作动示意图。
27.图7为本发明电动三轮车的平衡作动示意图。
28.图8为本发明使用各种磁制动器的电流、磁阻扭矩的关图。
29.图9为本发明车辆平衡控制系统实施于电动三轮滑板车的态样图。
30.图10为本发明电动三轮滑板车的平衡作动示意图。
31.附图标记说明:a-车辆平衡控制系统;1-车体;11-第一车体;111-前轮;112-转向机构;113-驾驶坐垫;114-刹车握把;115-前轮马达;12-第二车体;121-后轮组;122-置物斗;123-连接盘;2-倾斜功能模块;20-磁制动器;201-基座;21-心轴;22-转盘;221-锁定孔;23-螺栓;3-微控器;30-感测单元;31-输入单元;32-输出单元;33-运算单元;4-驻车锁定模块;41-移动轴;5-回复弹簧;6-用户选择界面;61-骑乘模式;62-载重模式;63-阻尼系数调整模式。
具体实施方式
32.本发明关于一种车辆平衡控制方法,如图1至图5所示,包含下述步骤:
33.一车体模块化步骤,将一车体1区分有一第一车体11及一第二车体12,又该车体1可以是电动三轮车、电动三轮滑板车或其他适用车辆;其中在该第一车体11、第二车体12之间接设有一倾斜功能模块2,且该倾斜功能模块2可以是制动器或磁制动器20,又该倾斜功能模块2受一微控器3控制;另将该倾斜功能模块2的相应位置处设有一驻车锁定模块4,以提供驻车时防倾倒机制,且该驻车锁定模块4受该微控器3控制或以机械式控制为之;进一步,将该倾斜功能模块2、车体1之间设有一回复弹簧5,又该回复弹簧5提供被倾斜车体1的回复力以及欲增加倾斜角度时的阻力。
34.一感测单元建置步骤,将数个感测单元30安装于前述车体1,其中该感测单元30更包含有一刹车、一轮速、一角度或/及一用户选择界面的传感器。
35.一电控模块建置步骤,以一微控器3电性连接该感测单元30,以便收集该刹车、轮速、角度或/及用户选择界面等的信号,俾利演算;进一步,该用户选择界面6更包含有:一骑乘模式、一载重模式或/及一阻尼系数调整模式;而该微控器3会依据该刹车、轮速、角度或/及用户选择界面6的信号,来控制该倾斜功能模块2,据以调整该车体1,倾斜时的阻尼系数。
36.一平衡控制步骤,经由该微控器3的运算结果来控制该倾斜功能模块2;进一步,当该轮速、角度的信号为零时,则该微控器3判断车体1为驻车状态,且同时控制该驻车锁定模块4;当该轮速信号不为零,该微控器3则解除驻车模式;并依据该刹车、轮速、角度或/及用户选择界面6的信号,来控制该倾斜功能模块2;另当该车体1的行驶过程中,该微控器3会依据该角度的信号,来控制该倾斜功能模块2往复时的阻尼系数。
37.藉由上述步骤,如图3、图6及图7所示,当车辆行驶或过弯中,该微控器3会依据该刹车、轮速、角度或/及用户选择界面的信号,令该倾斜功能模块2制动平衡该第一车体11或第二车体12的倾斜角度θ,据以调整该车体1,倾斜时的阻尼系数。换言之,以本实施态样中的电动三轮车为例,当车体1过弯时该感测单元30会感测到车体1的轮速、角度、有无刹车、用户选择界面等信号传送至该微控器3进行演算后再以该倾斜功能模块2制动平衡该第一车体11、第二车体12之间的倾斜角度θ。
38.进一步,该倾斜功能模块2制动该倾斜角度θ方式以该磁制动器20的磁阻扭矩,即该磁制动器20来调整该车体1往复时的阻尼系数,以避免该倾斜角度θ所引起的不适。又若在车体1呈现驻车状态时,会启动该驻车锁定模块4来锁定第二车体12而不会产生偏转(如图5所示);特别一提,配合图8所示,上述该磁制动器20以控制电流方式来调整煞车力(即磁
阻扭矩),换言之,该磁制动器20会依据当下车体轮速、倾斜角度等信号经过该微控器3的运算输出合适的电流,让该磁制动器20输出合适的扭矩,即该车体1必须克服该扭矩才能够倾斜,进而以该扭矩来制动平衡该倾斜角度θ,来提升行车的舒适性及安全性。
39.藉由上述车辆平衡控制方法延伸出本发明车辆平衡控制系统a,如图2至图6所示,其包含:一车体1、一倾斜功能模块2、一微控器3、一感测单元30、驻车锁定模块4、回复弹簧5。
40.其中该车体1,包含有一第一车体11及一第二车体12,其中该第一车体11设为车体1的前半部而包含有一前轮111、一转向机构112、一驾驶坐垫113及一用户选择界面6,另该第二车体12设为车体1的后半部而包含有一后轮组121及一置物斗122。
41.其中该倾斜功能模块2,接设于该第一车体11、第二车体12之间,而该倾斜功能模块2可设为一磁制动器20,以该磁制动器20提供配合该回复弹簧5来调整该车体1的阻尼系数,即该磁制动器20以其磁阻扭矩配合该回复弹簧5来达成该车体1的阻尼系数,以制动平衡该第一车体11、第二车体12之间的倾斜角度θ;如图4及图5所示本发明倾斜功能模块2的实施态样,主要以一基座201固定于该第一车体11的后端,且从其内部延伸出一心轴21,而该心轴21的外侧端设有一转盘22,而从该第二车体12的前端设有一连接盘123,藉由数个螺栓23将该转盘22、连接盘123结合一起,以致该倾斜功能模块2能够制动平衡该第一车体11、第二车体12之间的倾斜角度θ。
42.其中该微控器3,电性连接该感测单元30、倾斜功能模块2,进而控制该倾斜功能模块2的运作;进一步,又该微控器3更包含有一运算单元31、一记忆单元32、一输入单元33、一输出单元34等,其中该输入单元33电性连接该感测单元30的各传感器,以便能够收集该刹车、轮速、角度或/及用户选择界面等的信号,提供该运算单元31判读;而该输出单元34则电性连接该倾斜功能模块2、驻车锁定模块4。
43.其中该感测单元30,安装于车体1上,又该感测单元30更包含有数个传感器而分别安装于该刹车握把114、前轮马达115或后轮马达、倾斜功能模块2及用户选择界面6,据以分别感测该刹车、轮速、角度或/及用户选择界面等的信号。
44.其中该驻车锁定模块4,与该微控器3作电性连接,又将该驻车锁定模块4接设于该倾斜功能模块2上,据以锁定该第一车体11、第二车体12之间作相对旋转;进一步,该驻车锁定模块4更包含有一移动轴41,且以电磁方式致动该移动轴41,让该移动轴41穿伸或不穿伸于该倾斜功能模块2的转轴22所设一锁定孔221,便可以对该第一车体11、第二车体12之间作锁定。
45.其中该回复弹簧5,安装在该倾斜功能模块2上,并以该磁制动器20配合该回复弹簧5来调整该车体1的阻尼系数;于本实施态样中将该回复弹簧5的一端装设于该倾斜功能模块2的转盘22,而该回复弹簧5的另端装设于该倾斜功能模块2的基座201上。
46.其中该用户选择界面6与该微控器3作电性连接,如图2所示,提供骑乘者做选择切换,且该用户选择界面6更包含有:一骑乘模式61、一载重模式62或/及一阻尼系数调整模式63。
47.进一步,该骑乘模式61可以区分设定取消倾斜/自动倾斜/强制倾斜,其中该取消倾斜为致动该驻车锁定模块4或调大该车体1的阻尼系数,而该自动倾斜为当感测单元30侦测到轮速变慢时,则自动调大该车体1的阻尼系数,若轮速中等时则自动调小该车体1的阻
尼系数,若轮速变快时则又自动调大该车体1的阻尼系数;强制倾斜则强制调小该车体1的阻尼系数。
48.进一步,在该载重模式62下,会预设该车体1较大的阻尼系数,提供较大的载重,而该阻尼系数调整模式63设为用户习惯该倾斜功能模块2,可以自动调整想要的系数。
49.藉由上述元件构成本发明车辆平衡控制系统a,当车辆行驶中(包含过弯),该微控器3会依据该刹车、轮速、角度或/及用户选择界面的信号,令该倾斜功能模块2制动平衡该第一车体11或第二车体12的离心角度θ,据以平衡该车体1,不要过度倾斜。
50.特别一提,本发明的车辆平衡控制系统a亦可运用在电动三轮滑板车,如图9及图10所示,即以该倾斜功能模块2制动平衡该第一车体11或第二车体12于行驶或过弯中的离心角度θ,据以平衡该车体1,不要过度倾斜。
51.以上所述是本案的具体实施例及所运用的技术原理,若依照本案的构想所作的改变,其所产生的功能作用未超出说明书及图式所涵盖的精神时,均应在本案的范围内,合予陈明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1