在负载电流的宽范围内稳定的电流感测电路的制作方法
在负载电流的宽范围内稳定的电流感测电路
背景技术:
1.通常由于一个或多个原因感测到负载的电流。例如,过载保护可以包括当负载电流超过阈值时关闭到负载的电源。超过阈值的驱动负载的电源电路的温度可以损坏电源电路。因此,随着温度开始升高,到负载的电流可以减小,以降低温度。由于这种原因(或其他原因),到负载的电流量经常在从与降低温度相关联的低水平到与过电流状况相关联的高水平的范围内感测。
技术实现要素:
2.在一个示例中,一种电路包括功率晶体管,该功率晶体管包括第一控制输入以及第一电流端子和第二电流端子,第二电流端子耦合到负载以向该负载提供电流。第二晶体管包括第二控制输入以及第三电流端子和第四电流端子,并且第一控制输入和第二控制输入连接在一起,且第一电流端子和第三电流端子连接在一起。第三晶体管包括第三控制输入以及第五电流端子和第六电流端子。第四晶体管包括第四控制输入以及第七电流端子和第八电流端子,并且第七电流端子耦合到第四电流端子和第五电流端子。放大器放大第二电流端子上的电压和第四电流端子上的电压之间的差。该放大器的输出耦合到第三控制输入,并且二极管器件连接在第三控制输入和第四控制输入。
附图说明
3.图1示出了在宽范围内监控到负载的电流的感测电路。
4.图2示出了从图1的感测电路的增益变化的对相位裕度的影响。
5.图4示出了在整个范围内维持稳定性的同时在宽范围内监控到负载的电流的另一感测电路。
6.图5示出了相对于内部节点电压的图4的感测电路中的若干电流的关系。
具体实施方式
7.图1显示了包括功率晶体管的系统40的示例,该功率晶体管在此示例中实施为耦合到电源电压节点(vin)且耦合到负载45的金属氧化物半导体场效应晶体管(在图1中标记为“hsfet”)。负载45可以包括例如可编程逻辑控制器(plc)、机械臂或微控制器。该系统也包括感测电路50。通过向hsfet的栅极断言控制信号,电流iout穿过hsfet从电源电压节点vin提供给负载45。
8.感测电路50感测到负载的电流iout。感测电路50产生与iout成比例(但通常小于iout)的感测电流(isense),并且可以用于各种目的中的任何目的。例如,可以实施过流保护,以保护负载45和/或hsfet免受过高的输出电流iout。过高的iout可以损坏hsfet和负载45中的一个或两个。在一个示例中,通过监控isense的大小和检测isense何时超过与例如18a的iout对应的阈值,可以实施过流保护。一旦isense超过阈值,hsfet的栅极电压可以降低,以导致iout降低,或者hsfet的栅极可以下拉至与vout相等的水平,以完全关断iout。另
外,可以监控hsfet的温度,并且如果该温度超过阈值,则通过降低hsfet上的栅极电压以导致较少的电流流过hsfet,可以降低到负载45的iout的水平。例如,通过使用与hsfet相邻的双极结型晶体管产生与所称的绝对温度成比例的电压(ptat电压),可以监控hsfet的温度。ptat电压(δvbe)由给出,其中k是玻尔兹曼常数,t是以开尔文为单位的温度,q是电子的电荷,a2和a1是用于产生ptat电压的双极结型晶体管的面积。随着iout降低,继续监控由感测电路50生成的isense电流。为了避免对hsfet的损坏,iout可以降低到相对低的水平(例如,150ma)。因此,感测电路50应该能够在宽范围内监控从例如150ma到18a的iout电流。
9.在此示例中,感测电路50包括放大器52、电容器cd、晶体管m1和m2和感测晶体管(snsfet)。晶体管snsfet和hsfet形成电流镜。snsfet和hsfet的漏极连接在一起,并且其栅极也连接在一起。如果强迫hsfet和snsfet的源极上的电压近似相等,则穿过snsfet的电流(isense)将跟踪穿过hsfet的电流(iout)。在此示例中,snsfet小于hsfet。因此,用于snsfet的通道宽度(w)与通道长度(l)的比小于hsfet的w/l比。因此,hsfet的w/l与snsfet的w/l的比是n:1,其中n大于1。这个感测比是指isense是(1/n)*iout。在一个示例中,snsfet的w/l比是hsfet的w/l比的1/7000(即,n=7000),并且因此isense是iout/7000。isense也流过m1到地面。m1和m2也形成电流镜。在此示例中,m1和m2的w/l比是近似相等的,并且因此包括m1和m2的电流镜的电流镜比是1:1。因此,穿过m2的电流也等于isense。
10.放大器52的输入耦合到snsfet和hsfet的源极,并且因此放大器52放大snsfet和hsfet的源极电压之间的差,以生成到m1和m2的输出电压(vs)。放大器52是控制回路的一部分,该控制回路监控snsfet和hsfet的源极电压之间的差并且控制m1上的栅极电压,以调节snsfet的源极电压等于hsfet上的源极电压。snsfet的源极在识别为vsns的节点处连接到m1的漏极。hsfet的源极在识别为vout(用于负载45的输出电压)的节点处耦合到负载45。因此,穿过包括放大器52的控制回路,连续地调整vsns保持等于vout。
11.在反馈控制回路的稳定状态操作中,穿过snsfet的漏极电流(isense)等于(1/n)*iout,并且vsns等于vout。如果例如由于来自相邻电路的噪声耦合,vsns与vout略有偏差,则可能发生负载变化,这导致vout相对于vsns改变,并且本文所述的反馈回路将vsns返回到vout电压水平。例如,如果vsns略高于vout(例如,由于噪声导致的vsns节点上的寄生电容充电),则snsfet的漏极至源极电压(vds)将减小,并且snsfet的栅极至源极电压也将减小。因此,随着vsns增加,穿过snsfet的电流将减小,从而违反hsfet和snsfet之间的感测比。vsns耦合到放大器52的正(+)输入,并且vout耦合到放大器52的负(
‑
)输入。放大器52的正输入的增加将导致其输出电压vs也增加(假设vout无变化)。vs的增加表示m1的vgs的增加,这反过来导致穿过m1的漏极电流增加。m1的漏极电流的增加导致vsns节点上的寄生电容放电,从而将vsns电压减小回到等于vout的水平,并且穿过snsfet的电流增加回到(1/n)*iout。此校正的速度取决于控制回路的带宽。对于稳定的控制回路,在稳定状态下,vsns将等于vout。
12.如上所述,感测电路50应该具有宽范围的感测电流操作。在上面的示例中,isense可以在与150ma至18a的iout范围对应的水平之间变化。然而,图1的感测电路50可以在低isense电流值下不稳定,并且也在高isense值下不稳定。在低isense值下,不稳定性可以是
由于感测电路50的频率响应的主极点随isense减小而增加到更高的频率,并且也随着第一非主极点(fnd)的频率随isense减小而减小引起的。感测电路50的主极点的频率(fd)由给出,其中rs是观察vs节点时看到的阻抗。随着iout减小,isense减小,这意味着vs也减小。当vs减小时,放大器52内的晶体管(例如,在图3和图4的示例中的m362)的vds减小,这将晶体管从饱和区域过渡到操作的线性区域,从而降低rs。由于rs的降低,fd频率增加。感测电路50的第一非主极点的频率由fd=1/(2π*r_vsns*c_vsns)给出,其中c_vsns是vsns节点上的寄生电容和vsns节点上的r_vsns阻抗。r_vsns由以下给出:
13.rvsns=rout_m1||(rout_snsfet||1/gm_snsfet)≈1/gm_snsfet
ꢀꢀꢀ
(1)其中rout_m1是从vsns节点看到的m1的电阻,rout_snsfet是从vsns节点看到的snsfet的输出电阻,gm_snsfet是snsfet的跨导值(gm),并且“||”是指各组件是平行的。gm_snsfet的值是由以下给出:
[0014][0015]
其中vov_snsfet是snsfet的过驱动电压,即超过晶体管阈值电压的vgs电压。根据等式(2),随着isense减小(其下降速度快于vov_snsfet减小的速度),snsfet的gm减小并且因此,snsfet的1/gm增加。随着snsfet的1/gm增加,根据等式(1),r_vsns也增加并且因此fnd减小。随着fd正在增加且fnd正在减小(随着isense减小),相位裕量恶化,从而导致回路不稳定。不稳定的感测电路将导致在电流限制操作期间iout的振荡,因为感测的电流isense本身正在振荡,并且类似地,正在相同芯片上使用isense信息的任何其他回路也将振荡。例如,使用isense信息的功率限制回路可以导致传送到负载的功率的振荡。
[0016]
随着isense增加,不稳定性也可能发生,并且接近感测电路50的操作范围的上端。图1示出了系统40分成三个阶段——阶段1、阶段2和阶段3。阶段1包括hsfet和负载。阶段2包括放大器52,并且阶段3包括snsfet和m1。当snsfet正在线性区域中操作时,阶段3的增益是m1的gm和snsfet的导通电阻的函数,即:
[0017]
增益=gm_m1*rdson_snsfet
ꢀꢀꢀꢀꢀꢀ
(3)
[0018]
其中gm_m1是m1的gm,并且rdson_snsfet是snsfet的导通电阻。根据以上等式(2),随着穿过fet的电流增加,晶体管的gm也增加。因此,随着isense增加,gm_m1也增加,并且根据等式(3),随着gm_m1增加,阶段3的增益增加。因为阶段3的增益增加,该系统的整体增益(所有三个阶段的增益一起相乘)。图2示出了从增益曲线200到201的增益的增加。极点的频率位置保持相同,但是增益增加。相位频率关系保持不变,并且由此可知,相位裕量(在单位增益下的相位和180度之间的相位差)从原始相位裕量(pm_original)减小到与新增益曲线(pm_new)相关联的相位裕量,从而导致不稳定。
[0019]
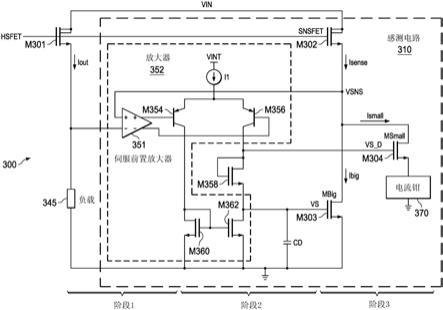
所描述的实施例针对在感测电路的相对较宽的操作范围内稳定的感测电路。因此,感测电路在操作范围的较低端处的感测电流水平处和在操作范围的较高水平处的感测电流的水平处都是稳定的。图3是包括耦合到负载345的晶体管hsfet m301的系统300的示意图。系统300也包括感测电路310,以感测到负载345的输出电流iout,并且产生与iout成比例并且因此是iout的代理的感测电流isense。感测电路310解决了在以上关于图1的感测电路50描述的低电流水平和高电流水平下的不稳定性问题。
[0020]
在本文对晶体管做出参考。晶体管具有控制输入和一对电流端子。金属氧化物半
导体场效应晶体管(mosfet)的控制输入是其栅极,并且其电流端子是其漏极和源极。双极结型晶体管(bjt)的控制输入是其基极,并且其电流端子是其集电极和发射极。
[0021]
在图3的示例中,感测电路310包括两阶段的放大器352、感测晶体管(snsfet)m302、晶体管mbig m303和msmall m304、电流钳370和电容器cd。两阶段放大器352包括伺服前置放大器351以及晶体管m354、m356、m358、m360和m362以及电流源器件i1。在此示例中,晶体管m354和m356包括p型双极结型晶体管(bjt),并且晶体管m358、m360和m362包括n型金属氧化物半导体场效应晶体管(也称为nmos器件的n型mosfet)。伺服前置放大器351的正输出和负输出分别耦合到m354的基极和m356的基极。m354和m356的发射极连接到电流源极i1(i1是指电流源器件及其产生的电流的大小)。m354的集电极连接到m360的漏极,并且m360的源极连接到地面节点。m356的集电极连接到m358的漏极,并且m358的源极连接到m362的漏极。m362的源极连接到地面节点。m360的栅极和m362的栅极连接在一起,并且连接到m360的漏极。m358的栅极连接到其漏极。m358配置为二极管连接的晶体管,使得m358的漏极是高于m358的源极约0.7v。电流源极i1和晶体管m354、m356、m358、m360和m362的组合表示晶体管放大器。
[0022]
snsfet m302用于感测hsfet m301中流动的电流。snsfet m302的栅极和hsfet m301的栅极连接在一起,其漏极也一样(也连接到电源电压节点(vin))。hsfet m301的源极耦合到负载345,并且耦合到伺服前置放大器351的负输入。snsfet m302的源极耦合到伺服前置放大器351的正输入。晶体管m302的源极连接到mbig的漏极和msmall的漏极。mbig的源极连接到地面节点。msmall的源极连接到电流钳370。
[0023]
图3的示例系统包括具体类型的晶体管。然而,该系统可以用其他类型的晶体管实施。可以用mosfet代替bjt,用bjt代替mosfet,用p型mosfet代替nmos器件等。
[0024]
hsfet m301具有可以适应到负载的相对较大的iout电流水平的尺寸(并且因此可以称为功率晶体管)。在一个示例中,hsfet 301的长度是在1微米(微米)至2微米的范围内,并且其宽度是在300mm至700mm的范围内。在一个示例中,宽度是570mm,并且长度是1.5微米。在此示例中,snsfet m302小于hsfet m301。因此,snsfet m302的通道的w/l比小于hsfet m301的通道的w/l比。在一个实施方式中,hsfet m301的w/l比是比snsfet m302的w/l比大7000倍,并且因此在那个示例中,电流镜比是7000:1。该7000:1电流镜比在功率效率和精度之间提供了可接受的平衡。随着hsfet m301的栅极和snsfet m302的栅极连接在一起,其漏极也一样,穿过snsfet m302的电流(isense)反映了iout的电流(尽管根据电流镜比,更小)。
[0025]
仍然参照图3,mbig m303也大于msmall m304。因此,用于mbig m303的w/l比大于msmall m304的w/l比。在一个示例中,用于mbig m303的w/l比是比msmall m304的w/l比大40倍,这鉴于300ma的输出电流提供可接受的值。mbig m303的栅极是来自m362的漏极的vs电压。vs是来自放大器352的输出信号。msmall m304的栅极耦合到提供标记为vs_d的电压的m358的漏极。m358配置为二极管连接的晶体管,并且因此m358的漏极高于其源极约1v。因此,vs_d高于vs约0.7v,这意味着msmall m304的vgs大于mbig m303的vgs。在相对低iout电流水平(例如,50ma至300ma)下,从放大器352输出的vs是相对低的(例如,用于在50ma至300ma的范围内的输出电流的50mv至150mv),且具体地足够低,以至于mbig m303可以导通,但传导非常小的漏极电流,或者完全不导通。然而,随着msmall m304的栅极被偏置高于
mbig m303的栅极,msmall被驱动强于mbig并且因此比mbig更多的电流流过msmall。isense在流过msmall m304的ismall电流和流过mbig m303的ibig之间划分。在isense的低水平下,因为msmall m304被驱动强于mbig m303,ismall大于ibig。例如,对于50ma的iout,90%以上的isense流过ismall,而不是ibig。此低水平电流效应在图5中示出,图5绘制了作为vs的函数的isense、ibig和ismall。在vs的低水平下(例如,vs1),ismall大于ibig。
[0026]
感测电路310是三阶段电路,其中阶段1包括伺服前置放大器351,阶段2包括含有电流源极i1和晶体管m354、m356、m358、m360和m362的晶体管放大器,并且阶段3包括snsfet、mbig、msmall和电流钳370。阶段3的增益由以下给出:
[0027]
增益=r(gm_msmall+gm_mbig)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0028]
其中r是在msmall m304的漏极处看到的阻抗,gm_msmall是msmall m304的跨导值,并且gm_mbig是mbig m303的跨导值。msmall和mbig的跨导值如下给出:
[0029][0030][0031]
其中vov_msmall是用于msmall m304的过驱动电压,并且vov_mbig是用于mbig m303的过驱动。随着msmall m304的栅极被偏置高于msmall m304的栅极(约高1v),msmall m304的vgs大于mbig m303的vgs并且因此用于msmall m304的过驱动电压大于mbig m303的过驱动电压。随着msmall的过驱动电压在isense的低水平下是相对大的,用于msmall的跨导值是相对小的。此外,随着相对小的电流(ibig)在isense的低水平下流过mbig m303,mbig m303的跨导值也是相对小的。因此,与来自图1的m1的跨导值相比,gm_msmall和gm_mbig的和小于gm_m1。因此,根据等式(3)和等式(4)的增益等式,图3的阶段3的增益比在iout的较低水平下的图1中的阶段3的增益更小(对于isense的小水平)。对于图3的感测电路310,通过使用mbig和msmall而不是m1(图1),在isense的低水平下的增益减小。当对于给定极点位置,来自组合在一起的三个阶段的增益,总增益减小时,回路通过增加相位裕量变得稳定。
[0032]
电流钳370允许ismall随着isense增加而增加,直到达到阈值,在这一点随着isense的进一步增加,ismall保持相对恒定。
[0033]
图4是与图3的系统类似但具有若干差异的系统400的示意图。系统400包括耦合到负载345的晶体管hsfet m301。系统400也包括感测电路310,以感测到负载345的输出电流iout,并且产生与iout成比例并且因此是iout的代理的感测电流isense。在图4的示例中,感测电路310包括两阶段放大器352、snsfet m302、晶体管m356、晶体管mbig m303和msmall m304、电流钳370、电容器cd和补偿电容器cc(补偿电容器cc不包括在图3的示例中)。
[0034]
如上所述,snsfet m302用于感测在hsfet m301中流动的电流。snsfet m302和hsfet m301的栅极连接在一起,其漏极也一样。hsfet m301的源极耦合到负载345,并且耦合到伺服前置放大器351的负输入。snsfet m302的源极耦合到伺服前置放大器351的正输入,以及耦合到晶体管m365的漏极。晶体管m365的源极连接到mbig和msmall的漏极。mbig的源极连接到地面节点。msmall的源极连接到电流钳370。电流钳370包括电流源极器件i2以及晶体管m372和m374。晶体管m372和m374包括其栅极连接在一起的nmos器件。m372和m374
的源极连接到地面节点。m372的栅极连接到其漏极,并且m372的漏极连接到i2。m304的源极连接到m374的漏极。
[0035]
如上所述,电流钳370允许ismall随着isense增加而增加,直到达到阈值,在这一点随着isense的进一步增加,ismall保持相对恒定。在此示例中,电流钳370包括耦合到晶体管m372和m374的电流源极器件i2。m372和m374包括其栅极连接在一起的nmos器件。m372和m374的源极也连接在一起并连接到地面节点。m272的栅极和漏极连接在一起,并且i2提供穿过m372的电流。在穿过msmall的漏极电流达到i2电流水平之前,m374在线性区域中操作并且电流由msmall控制。然而,随着穿过msmall的电流尝试增加高于i2,m374进入饱和区域且控制msmall中的电流,并且msmall本身进入线性操作区域。
[0036]
在图5中,在vs的低水平下,ismall大于ibig。ismall的上限如在i2处所示。随着isense继续增加,允许ibig增加而不是ismall。因此,在isense的较大水平(例如,与vs3对应的水平)下,ibig超过ismall。vs2表示ibig等于ismall的vs电压水平。isense在图4中示出为ismall和ibig的和。
[0037]
随着iout增加,isense也如上所述增加。一旦ismall在i2处达到上限,穿过mbig m303的ibig继续增加。在isense的较高水平下,大部分isense电流流过mbig m303而不是msmall m304(因为msmall设有上限)。如上所述,关于图1的感测电路50的不稳定性问题,阶段3的增益在isense的较大水平下增加,从而导致相位裕量减小,从而导致不稳定性。图4的示例感测电路310中补偿电容器cc的包括解决了此问题。补偿电容器cc导致与主极点相关联的频率减小。电容器cc的作用类似于米勒电容器,但是与米勒电容器(其对于给定的极点位置稳定电路)不同,在所述的示例中,电容器cc帮助主极点跟踪iout。因此,随着iout和isense增加,由于mbig的跨导值(gm)的增加,在cc两端的增益增加。此增加的增益将主极点先前从fd=1/2πrscd移动至1/2πrs(cd+avcc),其中av是在cc两端的增益。av随着isense增加而增加,并且因此主极点频率随着isense增加而减少,以增加相位裕量,从而由于如上所述回路中的增益增加,补偿相位裕量减少。因此,尽管其回路增益在较高感测电流下增加,但是感测电路310保持稳定。
[0038]
图3和图4的示例感测电路是单个电路解决方案,在宽的负载范围(例如,100ma至18a)内稳定。随着isense跟踪iout的越来越低的水平,阶段3的增益逐渐地降低。通过减小阶段3的增益,感测电路310在iout(isense)的低水平下保持稳定。在iout(isense)的较高水平下,主极点增加,从而避免了随着阶段3的增益增加而在电路中发生的振荡(不稳定性)。电流钳370有效地导致在iout(isense)的高水平下使用既不是有害也不是有好处的msmall m304。随着iout增大或减小,isense的发展是连续的,因此,从低iout电流水平到高iout电流水平的操作不会中断。此外,与至少一些其他感测电路相比,图1的感测电路310可以是更小的且功耗更低。
[0039]
在本说明书中,术语“耦合”是指间接或直接连接。因此,如果第一器件耦合到第二器件,则该连接可以是通过直接连接或通过经由其他器件和连接的间接连接。在权利要求的范围内,在所描述的实施例中,可以进行修改,并且可以进行其他实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1