一种自行走装置及其控制方法与流程
1.本发明关于一种自行走装置及其控制方法,尤其关于一种依据一边界数据移动一虚拟区域的位置的自行走装置及其控制方法。
背景技术:
2.日本专利公开第h08-215116a号中,记载一种自行走清扫机,其检测本体前方的墙壁,通过使本体与墙壁成直角地决定本体位置,设定方位感测器的零点。然而在该方法中,当墙壁近似平面时能够检测方向,但是当墙壁具有凹凸不平时恐怕就不能够正确地检测墙壁的角度。又,当清扫区中包含椅子和桌子等的障碍物时,需要变更移动路径避开障碍物。
3.图1显示已知自行走清扫机的路径控制方法的示意图。图1显示中国专利公开第cn1535646a号中所记载的自行走清扫机的控制方法的示意图。如图1所示,自行走清扫机910在开始清扫时,通过沿房间930的壁面920行走,而逆时针地绕房间930一圈的方式,来辨识清扫区域。依据前述已知技术,在沿壁面920行走时,同时设定自行走清扫机910的基准方位,再依据基准方位进行弓字型行走,而能够减少未清扫区域。然而,当房间很大时,绕房间一圈需要很长的时间。而且,在初次清扫完后,需要再扫描地图上多个未清扫区域,有时该些未清扫区域相差很远,而需要花较多的时间清扫。因此,该些已知技术,没有充分考虑到前述的情况,而有进一步改善的空间。
技术实现要素:
4.依据本发明一实施例的目的在于,提供一种自行走装置及其控制方法,其将一虚拟区域形成在一表面内,并且控制自行走装置于该虚拟区域内行走一路径并测得一边界数据,再依据该边界数据,移动该虚拟区域的位置,而形成一校正后(calibrated)虚拟区域,藉以提高行走效率。依据本发明另一实施例的目的在于,提供一种自行走装置及其控制方法,其在遇到障碍物后,沿障碍物的边缘行走的过程中,若遇到已走过的区域时,则停止该沿障碍物的边缘行走的步骤,并且执行扫描步骤,用以找出附近的未行走过区域,再继续往该未行走区域移动,藉以提高行走效率。
5.依据本发明一实施例,提供一种自行走装置其包含一行走装置、一感测模块及一控制模块。行走装置用以在一表面上移动自行走装置。感测模块包含一距离感测器且用以利用距离感测器所测得的数据,识别控制模块在表面内的位置。控制模块电连接感测模块及行走装置。控制模块更进行以下步骤。计算自行走装置的移动路径。在表面的地图信息内形成一第一虚拟区域d0(traveling throughout the area),其中第一虚拟区域d0包含一第一侧虚拟边界。以及,控制自行走装置于第一虚拟区域d0内行走一初始路径,其中,控制模块利用距离感测器测得一边界数据,再依据边界数据,移动第一虚拟区域d0的位置,而形成一校正后第一虚拟区域d1。
6.一实施例中,第一虚拟区域d0的第一侧虚拟边界,与感测模块所测得的一第一侧初始边界间具有一缓冲距离h。
7.一实施例中,感测模块测得第一虚拟区域d0内的一凹陷区c1后,控制模块使自行走装置进入凹陷区c1内,并利用感测模块测得凹陷区c1的一第一侧更新边界,并且移动第一虚拟区域d0的位置,使得校正后第一虚拟区域d1的第一侧虚拟边界向靠近该凹陷区c1的该第一侧更新边界的方向移动。
8.一实施例中,控制模块用以进行一循边步骤,该循边步骤控制该自行走装置行走至该表面的一边界后,将该边界视为该第一侧初始边界。
9.一实施例中,依据校正后第一虚拟区域d1,在表面内设置至少一第二虚拟区域d2。
10.一实施例中,控制模块更进行:使自行走装置遍历校正后第一虚拟区域d1后,移除校正后第一虚拟区域d1的虚拟边界,而进入至少一第二虚拟区域d2。而且较佳地,校正后第一虚拟区域d1与至少一第二虚拟区域d2至少一部分重叠。
11.一实施例中,第一虚拟区域d0的一第二侧虚拟边界,与感测模块所测得的一第二侧初始墙间具有一缓冲距离w。
12.一实施例中,当自行走装置遇到一障碍物时,沿障碍物的边缘行走。当自行走装置测得行走至已走过的区域时,停止沿障碍物的边缘行走,并寻找校正后第一虚拟区域d1中未走过的区域。并且,当校正后第一虚拟区域d1存在未走过区域时,自行走装置行执至未走过区域,以进行清洁。
13.一实施例中,控制模块在校正后第一虚拟区域d1中,形成多个格子。控制模块在自行走装置清洁过的格子后,标示已走过的记号。并且,当自行走装置测得行走至标示有已走过的记号的格子时,测得自行走装置行走至已走过的区域。
14.依据本发明一实施例,提供一种自行走装置的控制方法其适用于一自行走装置。自行走装置包含一行走装置、一感测模块及一控制模块。行走装置用以在一表面上移动自行走装置。感测模块包含一距离感测器且用以利用距离感测器所测得的数据,识别控制模块在表面内的位置。控制模块电连接感测模块及行走装置。自行走装置的控制方法包含以下步骤。在该表面的地图信息内形成一第一虚拟区域d0,其中该第一虚拟区域d0包含一第一侧虚拟边界。以及,控制该自行走装置于该第一虚拟区域d0内行走一初始路径,其中,控制模块利用距离感测器测得一对应于该初始路径的边界数据,再依据该边界数据,移动该第一虚拟区域d0的位置,而形成一校正后第一虚拟区域d1。
15.一实施例中,第一虚拟区域d0的第一侧虚拟边界,与感测模块所测得的一第一侧初始边界间具有一缓冲距离h。
16.一实施例中,该控制该自行走装置于该第一虚拟区域d0内行走一初始路径的步骤包含:利用该感测模块测得该第一虚拟区域d0内的一凹陷区c1后,使该自行走装置进入该凹陷区c1内,并利用该感测模块测得该凹陷区c1的一第一侧更新边界;并且移动该第一虚拟区域d0的位置,使得该校正后第一虚拟区域d1的该第一侧虚拟边界向靠近该凹陷区c1的该第一侧更新边界的方向移动。
17.一实施例中,自行走装置的控制方法,更包含:一循边步骤,用以控制该自行走装置行走至该表面的一边界后,将该边界视为该第一侧初始边界。
18.一实施例中,自行走装置的控制方法,更包含:依据该校正后第一虚拟区域d1,在该表面内设置至少一第二虚拟区域d2。
19.一实施例中,自行走装置的控制方法,更包含:使该自行走装置遍历该校正后第一
虚拟区域d1(traveling throughout the area);随后,移除该校正后第一虚拟区域d1的虚拟边界,而进入该至少一第二虚拟区域d2。其中,该校正后第一虚拟区域d1与该至少一第二虚拟区域d2至少一部分重叠。
20.一实施例中,第一虚拟区域d0的一第二侧虚拟边界,与该感测模块所测得的一第二侧初始墙间具有一缓冲距离w。
21.一实施例中,自行走装置的控制方法,更包含:当自行走装置遇到一障碍物时,沿该障碍物的边缘行走;当自行走装置测得行走至已走过的区域时,停止沿该障碍物的边缘行走,并寻找校正后第一虚拟区域d1中未走过的区域;并且当校正后第一虚拟区域d1存在未走过区域时,自行走装置行执至该未走过区域,以进行清洁。
22.一实施例中,自行走装置的控制方法,更包含:在校正后第一虚拟区域d1中,形成多个格子;在自行走装置清洁过的格子后,标示已走过的记号;并且当自行走装置测得行走至标示有已走过的记号的格子时,测得该自行走装置行走至已走过的区域。
23.综上所述,依据本发明一实施例,将一虚拟区域设置在一表面内,并且控制自行走装置于该虚拟区域内行走一路径,利用距离感测器测得一边界数据,再依据该边界数据,移动该虚拟区域的位置,而形成一校正后(calibrated)虚拟区域,藉以提高清洁效率。一实施例中,自行走装置在遇到障碍物后,顺时针地沿障碍物的边缘行走,且在执行沿障碍物的边缘行走的过程中,若遇到已走过或已清洁的区域时,则停止该沿障碍物的边缘行走的步骤,并且执行扫描步骤,用以找出附近的未走过区域,再继续依据“弓字型”路径行走方式来清扫房间,藉以提高清洁效率。
附图说明
24.图1显示已知自行走清扫机的路径控制方法的示意图。
25.图2a显示本发明一实施例自行走装置的俯视图。
26.图2b显示本发明一实施例自行走装置的功能方块图。
27.图3显示本发明一实施例自行走装置的控制方法的流程图。
28.图4a显示本发明一实施例自行走装置的控制方法的一步骤的示意图。
29.图4b显示本发明一实施例自行走装置的控制方法的移动第一虚拟区域的步骤的示意图。
30.图4c显示本发明一实施例自行走装置的控制方法的形成多个第二虚拟区域的步骤的示意图。
31.图5a显示本发明一实施例自行走装置的控制方法的一步骤的示意图。
32.图5b显示图5a的控制方法的一步骤的地图信息的示意图。
33.图5c显示本发明一实施例自行走装置的控制方法的一步骤的示意图。
34.图6显示本发明一实施例自行走装置的控制方法的一步骤的流程图。
35.【符号说明】
36.200:自行走装置
37.222:侧刷
38.223:行走装置
39.224:清洁装置
40.225:清洁装置
41.226:防撞杆
42.320:感测模块
43.321:距离感测器
44.330:泵模块
45.331:吸尘口
46.340:控制模块
47.341:编码器
48.342:电机模块
49.343:陀螺仪
50.344:处理器
51.345:存储器
52.361:地图信息
53.390:电源模块
54.832:第一侧虚拟边界
55.842:第二侧虚拟边界
56.900:表面
57.910:自行走清扫机
58.920:壁面
59.930:房间
60.931:第一侧初始边界
61.932:第一侧更新边界
62.940:障碍物
63.941:第二侧初始边界
64.942:第二侧更新边界
65.c1:凹陷区
66.c2:凹陷区
67.d1:校正后第一虚拟区域
68.d0:第一虚拟区域
69.d2:第二虚拟区域
具体实施方式
70.将参照附图,详细地说明本发明,其中相同的标号将用于识别多个视点的相同或近似的元件。应注意的是,图式应以标号的取向方向观看。
71.依据本发明一实施例,提出一种自行走装置及其控制方法,自行走装置其可以为一种清洁装置或清洁机器人。图2a显示本发明一实施例自行走装置的俯视图。如图2a所示,自行走装置200包含有一吸尘口331、至少一侧刷222、一行走装置223以及一清洁装置224和225。侧刷222向下延伸用以将地面的灰尘扫入吸尘口331。清洁装置224和225可以包含一清洁布设于底侧且面向下用以擦拭地面。一实施例中,行走装置223可以为一皮带轮装置其包
含两个轮子及一皮带,而且皮带连接于该些轮子之间。一实施例中,可以将一防撞杆226设于自行走装置200的前方,用以感测与碰撞一障碍物的事件。
72.图2b显示本发明一实施例自行走装置的功能方块图。请参照图2b,于本实施例中,自行走装置200更包含一感测模块320、一泵模块330、一控制模块340及一电源模块390。电源模块390用以提供一电源给泵模块330及控制模块340。泵模块330驱动真空吸尘装置(未图示)进行真空吸尘,从吸尘口331吸入灰尘后将灰尘收集在集尘带(未图示)中。感测模块320包含至少一距离感测器321。
73.距离感测器321电连接于控制模块340,用以传送一距离数据给控制模块340。控制模块340包含一编码器341、一电机模块342、一陀螺仪343、一处理器(cpu)344及存储器345。电机模块342驱动行走装置223,使自行走装置200前后移动或左右转动。电机模块342电连接有一个编码器341(encoder),编码器341依据电机模块342的一操作信号,以求得行走距离或转弯角度。由编码器341的读值可计算出自行走装置200行走的距离或转弯的角度。控制模块340的陀螺仪343用以量测的自行走装置200的角速度(ω),然后对角速度(ω)的积分而得到机器的积分角度(ia),如下公式eq1。编码器341依据行走距离、转弯的角度及积分角度(ia)至少其中之一作出惯性导航(inertial navigation),并且进行“弓字型”来回清扫。
74.ia=∫kωdt
ꢀꢀꢀꢀ
eq1
75.其中,ia表示积分角度,k为陀螺仪的常数,ω为角速度,t为时间。
76.一实施例中,可以将检测行走装置223的轮子的转动速度的转动编码器341,安装在行走装置223的电机模块342的左右电机上。控制模块340可以更设置有检测前方或侧方的障碍物的前方或侧方接近感测器(距离感测器321)。从感测器发出信号,例如为红外线光束,该红外线光束射在物体上时产生反射光,控制模块340检测到反射光计算出感测器与障碍物间的距离。为了确实地检测障碍物及壁面,将侧方接近感测器,设置在自行走装置200的右侧或左侧。在本实施例中,使自行走装置200的右侧沿壁行走,所以将侧方接近感测器设置在能够感测自行走装置200的右侧的位置。
77.控制模块340根据转动编码器341和陀螺仪343、前方接近感测器及侧方接近感测器(距离感测器321)检测出的信息,驱动电机模块342使自行走装置200移动。控制模块340是备有cpu和存储器、输入输出电路的控制用电脑系统。为了执行控制模块340的操作演算法,将电脑程序内藏在存储器中。控制模块340的存储器的一部分用于存储地图信息361。
78.此外,在本说明书中,将室内的可以移动的区域的墙壁和门的边缘等称为“边界”,边界可以包含沿墙壁放置的架子等的家具。将在房间内部且配置在远离边界的位置上的椅子和桌子等,当作不能够清扫的区域且称其为“孤立障碍物”。而障碍物可以指边界或孤立障碍物。在自行走装置200的行走中,积分陀螺仪343检测出的角速度,求得自行走装置200的行进方向的方位角q。利用编码器341检测出的移动距离和方位角q,求得自行走装置200的移动量和移动方向后,以计算出自行走装置200的位置。并且,随时地比较自行走装置200的初始位置和现在位置,如果初始位置和现在位置大致相同时,则判断已经绕房间一圈或虚拟区域(如后述)一圈。此外,由于使自行走装置200的右侧沿壁行走,因此当自行走装置200判断是逆时针绕一圈(后述的差异角δa约为360
°
)时,则判断是绕壁面一圈,然而,当自行走装置200判断是顺时针绕一圈时,则判断是绕孤立障碍物一圈(后述的差异角δa约为
360
°
)。
79.控制模块340用以依据距离感测器321所测得数据,制作房间930的地板的表面900的地图信息361。地图信息361包含2维排列的多个格子数据m(i,k)。更具体而言,将清扫区域的地板的表面900画分成预定大小的格子状,例如为5cm
×
5cm,形成子区块a(j,l)。将格子数据m(p,q)分别对应地于各子区块a(p,q)上。并且,地图信息361更包含被写入在各格子数据m(p,q)中的用以表示特定意义的一标记,该标记可以为例如表示“未确认”、“边界”、“虚拟边界”、“已清洁”、“已走过”或“孤立障碍物”等的标记。在图5b中,文字“w”表示边界。文字“c”表示已走过,且当自行走装置为清洁机时文字“c”亦可以表示为“已清洁”。空白的区块表示“未确认”。在图4a中,文字“x”表示虚拟边界。根据要清扫房间的大小和行走所要求的精度、存储器容量、计算速度等,决定格子的尺寸,例如亦可以定为1cm
×
1cm左右。于本说明书中,虚拟边界是指实际不存在的边界,但是利用控制模块340在地图信息361中划出虚拟边界,控制自行走装置200不超出虚拟边界的数据。一实施例中,感测模块320包含一距离感测器321,且用以利用距离感测器321所测得的数据识别控制模块340在表面900内的位置。因此,当划出虚拟边界后,控制模块340可以控制自行走装置200不超出虚拟边界。
80.一实施例中,控制模块340规划出能够储存总共1000
×
1000个格子,每个格子为5cm
×
5cm~20cm
×
20cm的方形,较佳地为5cm
×
5cm。一实施例中,控制模块340更使每个虚拟区域约为4.4公尺,亦即每个格子为5cm
×
5cm时有88个格子。一实施例中,两相邻的虚拟区域重叠例如30cm亦即每个格子为5cm
×
5cm时有约6个格子,如图4c所示的ao及ao1,用以避免没有被清洁的区域。
81.依据本发明一实施例,提出一种自行走装置200及其控制方法,其将一虚拟区域d0设置在一表面内,并且控制自行走装置200于虚拟区域d0内行走一路径,并且利用距离感测器321测得一边界数据,再依据该边界数据,移动虚拟区域d0的位置,而形成一校正后(calibrated)虚拟区域d1,藉以提高清洁效率。以下,将更进一步地说明本发明的具体实施例。
82.图3显示本发明一实施例自行走装置的控制方法的流程图。如图3所示,依据本发明一实施例的自行走装置的控制方法包含以下步骤。
83.步骤s02:计算该自行走装置200的移动路径,并进行一循边步骤用以利用感测模块320测得一第一侧初始边界931,该循边步骤控制自行走装置200行走至表面900的一边界后,将该边界视为该第一侧初始边界。图4a显示本发明一实施例自行走装置的控制方法的一步骤的示意图。如图4a所示,一实施例中,自行走装置200开始清扫时,往其前方的方向fd直行,直到在点pa遇到墙壁。一实施例中,当往自行走装置200其前方的方向fd直行遇到孤立障碍物时,沿孤立障碍物的边缘逆时针旋转,并行走一段距离后,测得其方向fd没有任一孤立障碍物时,继续往方向fd行走,直到碰到墙壁时,继续逆时针测墙壁行走且持续测得方向fd不能行走一预设时间后,确认已遇到第一侧初始边界(如后述的图5b实施例)。
84.本发明不限定循边的方法,一实施例中,自行走装置200遇到障碍物后,持续地沿该障碍物行走一段时间,当自行走装置200测得它是逆时针旋转时,则判定该障碍物为墙面或表面900的边界的一部分,而且当自行走装置200测得它逆时针旋转一圈时表示它已绕地板的表面900一圈。相反地,当沿该障碍物行走一段时间后,自行走装置200测得它是顺时针旋转时,则判定该障碍物为一孤立障碍物的一部分,而且当自行走装置200测得它顺时针旋
转一圈时表示它已绕该障碍物的边缘一圈。
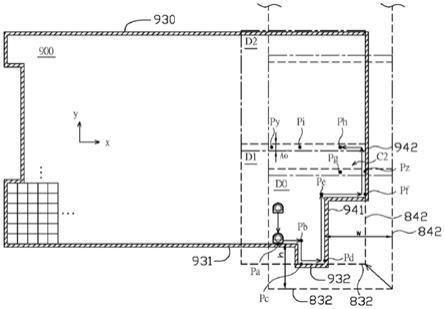
85.步骤s04:在房间930的地板的表面900的地图信息361内形成一第一虚拟区域d0,其中第一虚拟区域d0包含一第一侧虚拟边界832。较佳地,第一虚拟区域d0的第一侧虚拟边界832,与感测模块320所测得的一第一侧初始边界931间具有一缓冲距离h。
86.由于设立第一虚拟区域d0后,自行走装置200将不能够超出第一虚拟区域d0至第一侧虚拟边界832的外侧,因此,若实际的清洁区域中,在第一虚拟区域d0外部具有未探测到的凹陷区(concave area)c1时,机器人将无法进入凹陷区c1。因此,为了避免实际的清洁区域中具有凹陷区c1,较佳地,第一虚拟区域d0设置成:自行走装置200的位置不落在第一虚拟区域d0的第一侧虚拟边界832上,例如在第一虚拟区域d0的角落或边界线上。或者第一虚拟区域d0设置成:第一侧虚拟边界832不设置在相同于自行走装置200所探测到的第一侧初始边界931(亦即实际墙面)的位置上。依据前述设计,能够有更大的机会,使第一虚拟区域d0内包含有凹陷区c1,藉以让自行走装置200有机会能够进入到凹陷区c1内,藉以探索凹陷区c1中的边界线。
87.如图4a所示,由于第一侧虚拟边界832,与感测模块320所测得的一第一侧初始边界931间具有一缓冲距离h,因此,当自行走装置200行走到点pb且探测到凹陷区c1后,能够进入凹陷区c1。
88.步骤s06:于第一虚拟区域d0内沿第一侧初始边界931行走一初始路径,并且控制模块340利用距离感测器321测得初始路径上的一边界数据,再依据该边界数据,移动第一虚拟区域d0的位置,而形成一校正后第一虚拟区域d1。
89.图4b显示本发明一实施例自行走装置的控制方法的移动第一虚拟区域d0的步骤的示意图。如图4a及4b所示,自行走装置200进入凹陷区c1内,行走到点pc且测得凹陷区c1的第一侧更新边界932后,移动第一虚拟区域d0的位置,使第一侧虚拟边界832靠近第一侧更新边界932。于图4b实施例中,第一侧虚拟边界832贴齐第一侧更新边界932。于另一实施例中,可以仅使第一侧虚拟边界832与第一侧更新边界932之间的距离,小于缓冲距离h且大于零。举例而言,较佳地可以为相同于两相邻虚拟区域的重叠区域ao的距离。
90.步骤s08:依据该校正后第一虚拟区域d1,在该表面900内形成至少一第二虚拟区域d2。于一实施例中,校正后第一虚拟区域d1及该至少一第二虚拟区域d2中的两相邻虚拟区域至少一部分重叠ao,藉以避免因行走误差或其他因素,而造成两相邻的虚拟区域间存在没有被清洁的区块。
91.步骤s10:自行走装置200清洁完校正后第一虚拟区域d1后,移除校正后第一虚拟区域d1的虚拟边界,并进入至邻近的第二虚拟区域d2内,随后,如图4b所示,再次形成第二虚拟区域d2的虚拟边界,并且清洁该第二虚拟区域d1。
92.如图4b所示,在没有移动第一虚拟区域d0的情况下,在房间930的y方向上,需要形成3个虚拟区域。然而,移动第一虚拟区域d0形成校正后第一虚拟区域d1后,在房间930的y方向上,需要形成2个虚拟区域。图4c显示本发明一实施例自行走装置的控制方法的形成多个第二虚拟区域d2的步骤的示意图。应注意的是,为了使行走路线及符号能够清楚的显示,在图4a至4c中仅部分地划出格子。如图4c所示,在没有移动第一虚拟区域d0的情况下,在房间930的x方向上,需要形成4个虚拟区域。然而,移动第一虚拟区域d0形成校正后第一虚拟区域d1后,在房间930的x方向上,需要形成3个虚拟区域。因此,本发明的自行走装置200提
高了自行走装置200的清洁效率。
93.再请参照图4a及4b,自行走装置200行走至点pd时,测得第二侧初始边界941。行走至点pe时测得凹陷区c2,由于第一虚拟区域d0的第二侧虚拟边界842与第二侧初始边界941间具有一缓冲距离w,因此自行走装置200能够进入至凹陷区c2中。自行走装置200行走至点pf时,测得凹陷区c2中的第二侧更新边界942。随后,移动第一虚拟区域d0的位置,使第二侧虚拟边界842向靠近第二侧更新边界942的方向移动。于图4b实施例中,第二侧虚拟边界842贴齐第二侧更新边界942。于另一实施例中,可以使第二侧虚拟边界842与第二侧更新边界942之间的距离,小于缓冲距离w且大于零。举例而言,较佳地可以为相同于两相邻虚拟区域的重叠区域ao1(如图4c)。
94.应了解的是,本发明不限定移动第一虚拟区域d0的时间点,只要是在遇到虚拟边界之时或之前移动第一虚拟区域d0即可,本领域技术人员可以依据需要决定移动第一虚拟区域d0的时间点。举例而言,一实施例中,自行走装置200可以在发现其目前位置在y方向上已超出点pa(例如在点pe时)时,移动第一虚拟区域d0,使第一侧虚拟边界832向靠近第一侧更新边界932的方向移动。于一实施例中,亦可以在遇到虚拟边界时,例如在点pz的位置,再移动第一虚拟区域d0,使第一侧虚拟边界832向靠近第一侧更新边界932的方向移动。一实施例中,自行走装置200亦可以在发现其目前位置在x方向上已超出点pd(例如在点pi时)时,移动第一虚拟区域d0,使第二侧虚拟边界842向靠近第二侧更新边界942的方向移动。于一实施例中,亦可以在遇到虚拟边界时,但如在点py的位置,再移动移动第一虚拟区域d0,使第二侧虚拟边界842向靠近第二侧更新边界942的方向移动。
95.如上述,自行走装置200于第一虚拟区域d0内行走一路径后,依据自行走装置200所行走过的该路径,移动第一虚拟区域d0的位置,而形成一校正后第一虚拟区域d1。此外,并依据行走过的该路径,决定更新边界,再使第一侧虚拟边界832靠近第一侧更新边界932或使第二侧虚拟边界842靠近第二侧更新边界942,而形成校正后第一虚拟区域d1。相较于没有形成校正后第一虚拟区域d1的情况,形成校正后第一虚拟区域d1的情况,自行走装置200所形成的虚拟区域的数量较少,因此,移动第一虚拟区域d0的好处在于,能够减少虚拟区域的个数进而能够提高清洁的效率。
96.此外,一实施例中,自行走装置200先直行,遇到墙壁(步骤s02)后,先形成一约4.4公尺的虚拟区域(步骤s04)。随后在虚拟区域内,以逆时针方向(让自行走装置200的右侧刷靠近墙面)沿墙壁行走,当测得其他更新墙壁时,移动虚拟区域的位置(步骤s06)。接着,绕更新后的虚拟区域的虚拟边界或真实墙壁行走,并且在绕完后开始弓字形行走。
97.依据本发明一实施例,提出一种自行走装置及其控制方法,自行走装置其可以为一种清洁装置或清洁机器人。自行走装置200在遇到障碍物后,顺时针地沿障碍物的边缘行走,且在执行沿障碍物的边缘行走的过程中,若遇到已清洁的区域时,则停止该沿障碍物的边缘行走的步骤,并且执行扫描步骤,用以找出附近的未走过区域,再继续依据“弓字型”路径行走方式来清扫房间,藉以提高清洁效率。以下,将更进一步地说明本发明的具体实施例。
98.图5a显示本发明一实施例自行走装置的控制方法的一步骤的示意图。图5b显示图5a的控制方法的一步骤的地图信息的示意图。应注意的是,为了避免图示过于复杂,并使行走路线及符号能够清楚的显示,在图5b中仅部分地划出格子和行走路线,且格子的比例也
非实际尺寸,仅用于示意。图5c显示本发明一实施例自行走装置的控制方法的一步骤的示意图。图6显示本发明一实施例自行走装置的控制方法的一步骤的流程图。
99.图6显示自行走装置200于一虚拟区域的控制方法的流程图,如图6所示,自行走装置200于一虚拟区域的控制方法包含以下步骤。
100.步骤s20:自行走装置200进行弓字型行走。
101.步骤s22:判断在该虚拟区域内是否遍历完毕,当是时进入步骤s30,当否时进入步骤s24。
102.步骤s24:自行走装置200判断是否撞边且该处未走过,当是时进入步骤s26,当否时进回到步骤s20,并且将该撞边的处记录为循边的初始点。
103.步骤s26:自行走装置200进行循边行走。更具体地,让自行走装置200的右侧沿着障碍物的边行走。
104.步骤s28:进行循边行走的过程中,判断目前位置是否已走过而且目前位置的方位角q与循边的初始点的方位角q0间的差异角δa》300
°
;或者判断目前位置是否已走过而且δa《-180
°
,当是时进入步骤s28,当否时回到步骤s24继续循边行走。
105.步骤s30:进入下个虚拟区域。
106.差异角δa大于零时表示逆时针旋转,而差异角δa小于零时表示顺时针旋转。此外,于本领域技术人员可以适宜地设定角度的大小,例如为差异角δa大于第一预设角度,差异角δa小于第二预设角度,而且,该第一预设角度可以为250
°
、300
°
、350
°
、360
°
或前述数字之间的值等。该第二预设角度可以为-130
°
、-180
°
、-230
°
、-330
°
、-360
°
或前述数字之间的值等。此外,一实施例中,可以利用防撞杆226来感测碰撞信号,以判断出撞边。于其他实施例中,亦可以利用距离感测器321来量测自行走装置200与障碍物(孤立障碍物或墙面)间的距离,当该距离符合一预设距离范围时,判断出撞边。
107.如图6、图5a及5b所示,自行走装置200开始清扫一虚拟区域,例如第一虚拟区域d0、校正后第一虚拟区域d1或第二虚拟区域d2时,先进行弓字型行走(步骤s20)并判断是否遍历完毕(步骤s22)。在确定未遍历完毕的情况下,自行走装置200从点p0的位置往其前方的方向fd行走,当自行走装置200行走至点p1时,会撞边并遇到障碍物940,此时判断出撞边且未走过,并将点p1设成初始点(步骤s24),此时自行走装置200进行循边行走(步骤s26),亦即让自行走装置200的右边沿障碍物940的周围行走,最后会再行走至点p1并发现它已顺时针绕一圈(目前位置的方位角q与初始点p1的方位角q0间的差异角δa介于-330
°
至-360
°
间)后确认障碍物940为孤立型障碍物940,得知自行走装置200尚未找到虚拟区域内的墙壁。换言之,再行走至点p1时,自行走装置200测得,δa《-180
°
且已走过或已清洁(例如为目前格子pg已标示有c)(步骤s28),继续进行弓字型行走(步骤s20)。更具体地,自行走装置200再逆时针旋转,并行走一段距离后走到点p2。当发现在点p2处的方向fd没有任一障碍物时,继续往方向fd行走,走到点p3时碰到墙壁,此时判断出撞边且未走过,并重新将点p3设成初始点(步骤s24)。条件1:pg=c而且δa》=300,或者,条件2:pg=c而且δa《=-180。
108.当该虚拟区域为第二虚拟区域d2或已是校正后第一虚拟区域d1的情况时,自行走装置200进行循边行走(步骤s26),亦即自行走装置200再以逆时针方向沿墙壁行走一段距离。当回到点p3时,测得δa》300
°
且已走过(步骤s28),继续进行弓字型行走(步骤s20)。
109.当该虚拟区域为第一虚拟区域d0的情况时,控制模块340将一第一虚拟区域d0设
置在房间地板的表面900的地图信息361内。此时,自行走装置200进行循边行走(步骤s26),亦即自行走装置200再以逆时针方向沿墙壁行走一段距离。当回到点p3时,测得δa》300
°
且已走过(步骤s28),继续进行弓字型行走(步骤s20)。于一实施例中,由于点p3之后的路径,在方向fd上皆是无法行走的区域,因此可以判断点p3为墙壁。在行走一段时间后,发现没有必要移动第一虚拟区域d0时,就绕墙壁及第一虚拟区域d0行走一圈。举例而言,自行走装置200在发现其目前位置在x方向上已超出点p3时,第一侧初始边界931比第一侧更新边界932更远离自行走装置200的目前位置,亦即第一侧初始边界931为最远边界时,不移动第一虚拟区域d0的位置,直接将第一虚拟区域d0视为校正后第一虚拟区域d1。于其他实施例中,可以在行走一段时间后,发现需要移动第一虚拟区域d0时,形成校正后第一虚拟区域d1,随后再针对墙壁及校正后第一虚拟区域d1循边行走。
110.再请参照图5b,当自行走装置200遇到墙面时,在墙面所在的格子内标示w用以表示边界,并且在它清洁过的格子内,标示c用以表示已走过或已清洁。自行走装置200以逆时针方向行走一段时间后,在必要时移动第一虚拟区域d0的位置,藉以形成校正后第一虚拟区域d1。当自行走装置200发现它已逆时针行走360度且目前位置大致为点p3时,或者一实施例中亦可以在自行走装置200发现其目前位置与点p3在一预定范围内时,更具体而言测得δa介于330
°
至360
°
间且点p3已走过(步骤s28)时,得知它已大致地围绕了校正后第一虚拟区域d1或第二虚拟区域d2,则开始进行弓字型行走(步骤s20)。一实施例中,可以将沿墙面或墙面附近的以外的已清洁区域的标记去除,另外一实施例中,亦可以保留。自行走装置200将已走过或清洁过的区域的格子,标示为c,且通过点p4后将点p4的格子标示为c,再行走至点p5进而遇到障碍物940,此时判断出撞边且未走过,并将点p5设成初始点(步骤s24)。
111.在点p5时,自行走装置200进行循边行走(步骤s26),更具体地自行走装置200的右侧沿障碍物940的边缘行走,以顺时针地绕障碍物940的边缘。接着会再行走至点p4,此时测得δa《-180
°
且已走过(步骤s28),发现点p4为已走过区域或已清洁的区域,亦即得知点p4的格子的标示为c,则停止循边行走并停止绕障碍物940的边缘的步骤。随后,扫描地图信息361中未走过或未清洁且与点p4最接近的区域,此时发现点p6的上方的格子未走过或未清洁,且与点p4最接近,因此自行走装置200移动至点p6后,继续进行弓字型行走(步骤s20)。于本实施例中,在点p4已停止循边行走,不会行走至点p5而重复地清洁点p4至点p5间的已清洁的区域,因此可以提高清洁效率。
112.假设自行走装置200行走至点p7时,已初步地清洁完目前虚拟区域后,再扫描目前虚拟区域内未清洁(亦即未走过)的区域,发现点p8右方的格子未清洁(步骤s22)。自行走装置200行走至点p8,将未清洁的区域清洁完毕。此外,另一实施例中,在点p7,自行走装置200发现有多个未清洁的区域(步骤s22)时,则行走至与点p7最接近的未清洁区,完成该区的清洁后,再清洁下一个未清洁区(步骤s30)。直到目前虚拟区域中的所有的未清洁区皆已被清洁,才完成清洁程序。接着,关闭目前虚拟区域的虚拟边界,进入至下个虚拟区域。于本实施例中,由于是在虚拟区域内寻找未清洁的区域,点p7与点p8间的距离被限制在虚拟区域内,而不是整个房间,因此行走的距离较短,可以提高清洁效率。此外,虚拟区域的面积小于整个房间的面积,所造成的未清洁区域也会相对地少,进而减少了重复行走的距离。
113.如图6及图5c所示,图5c实施例与图5a实施例的差异在于,自行走装置200在虚拟区域的位置不同。于本实施例中,自行走装置200,先进行弓字型行走(步骤s20)并判断是否
遍历完毕(步骤s22)。在确定未遍历完毕的情况下,自行走装置200从点p0的位置往其前方的方向fd行走,并且走到点p3时碰到墙壁,此时判断出撞边且未走过,并重新将点p3设成初始点(步骤s24)。随后,自行走装置200进行循边行走(步骤s26),亦即自行走装置200再以逆时针方向沿墙壁行走一段距离。当回到点p3时,测得δa》300
°
且已走过(步骤s28),继续进行弓字型行走(步骤s20)并判断是否遍历完毕(步骤s22),未遍历完毕时继续行走而会经过点p4。当自行走装置200行走至点p5进而遇到障碍物940,此时判断出撞边且未走过,并将点p5设成初始点(步骤s24)。在点p5时,自行走装置200进行循边行走(步骤s26),本实施例中,自行走装置200以顺时针地绕障碍物940的边缘,接着会再行走至点p4,此时测得δa《-180
°
且已走过(步骤s28),发现点p4为已走过区域时停止循边行走,并且发现点p6的上方的格子未走过或未清洁,且与点p4最接近,因此自行走装置200移动至点p6后,继续进行弓字型行走(步骤s20)。自行走装置200行走至点p7及点p8的过程,与前述实施例相同,因此省略其相关说明。
114.依据本发明一实施例,在针对虚拟区域及障碍物进行循边行走时,不必然需要围绕虚拟区域及障碍物一圈,仅自行走装置200需要在测得它的方向角大于一第一预定角度或小于一第二预定角度,而且发现目前位置已走过,如此可以尽可能地避免重复行走或清,而增加行走及清洁的效率。
115.综上所述,依据本发明一实施例,将一虚拟区域设置在一表面内,并且控制自行走装置于该虚拟区域内行走一路径,并且利用距离感测器测得一边界数据,再依据该边界数据,移动该虚拟区域的位置,而形成一校正后(calibrated)虚拟区域,藉以提高清洁效率。一实施例中,自行走装置200在遇到障碍物后,顺时针地沿障碍物的边缘行走,且在执行沿障碍物的边缘行走的过程中,若遇到已清洁的区域时,则停止该沿障碍物的边缘行走的步骤,并且执行扫描步骤,用以找出附近的未走过或未清洁区域,再继续依据“弓字型”路径行走方式来清扫房间,藉以提高清洁效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1