一种针对空中机动目标的三维协同中制导方法与流程
[0001]
本发明属于制导技术领域,具体涉及一种三维协同中制导方法。
背景技术:
[0002]
随着反拦截器技术日趋完善,空中机动目标一方面可以通过释放诱饵、蛇形机动或者其他对抗手段对拦截器进行干扰和对抗,使得现有拦截器的拦截效率大大降低;另一方面,空中目标的性能随着人工智能、无人机技术的快速发展而大幅提升,单个拦截器的探测能力和机动能力都难以满足高精度的打击要求,需要采用协同包围攻击技术。因此,多拦截器协同突防或拦截的思路应运而生。多拦截器协同编队协同作战方式是指多个拦截器通过信息共享、功能互补,不仅能够实现对目标从多个方向进行饱和攻击,提高打击效果和命中概率,还能实现单个拦截器不易完成的协同突防等任务。针对军事价值较高的目标,多拦截器协同编队作战方式是实施突发性和高密集的精确打击的重要手段,是未来突发性地区战争的重要打击形式。
[0003]
对于中远程拦截器来说,要想实现多拦截器编队进行饱和打击需要经历四个飞行阶段,分别为编队集结、编队飞行、编队中末交班和编队末制导阶段。对于中远程拦截器编队来说,要想实现协同打击目标的任务,需要从拦截器发射阶段就开始进行协同,经过协同中制导和中末制导交班,最后进行协同末制导,对目标完成协同聚能饱和打击。若单研究其中一个飞行阶段的协同制导问题是不可行的,从而无法完成协同打击目标的任务,例如:当有两枚拦截器同时指向同一目标,一枚拦截器已经进入末制导阶段,距离目标低于15km;另一枚拦截器在中制导阶段,距离目标有30km以上,此时,这两枚拦截器很难完成协同攻击,不符合进行协同制导的基础条件(离目标的距离误差在一定范围内)。所以,对于中远程多拦截器编队协同制导,多拦截器编队整个飞行阶段的协同都至关重要,每一阶段的协同完成效果直接影响下一阶段的协同任务完成度。因此,对于多拦截器编队协同中制导段,需要实现可以在同一时刻或者近似同一时刻到达中末制导交班区,为多拦截器编队进行协同末制导做好准备。
[0004]
目前,主要的理论研究与工程方法大都集中在协同末制导段,而末制导阶段的协同与中制导阶段的协同有本质上的区别。末制导阶段的目标信息获取由拦截器本身的导引头完成,目标信息精度较高,而且多拦截器编队队形和通信拓扑结构基本不发生变化,拦截器之间距离较小,通信连接情况良好,很容易达到强连通状态。在中制导阶段,目标信息由外部传感器探测和估计所得,拦截器之间距离较大,通信连接情况较差。因此,拦截器在协同中制导段所采用的制导律与在协同末制导段采用的制导律有很大区别,主要体现在:性能指标的要求、约束条件、制导目的以及获取目标信息的方式和目标信息的质量等。
[0005]
同时,因为末制导时间太短,拦截器可以调整的飞行距离和飞行速度等非常有限,必须要有非常好的协同中制导律,确保在中末制导交班时就能达到时间和空间初步的协同,即给末制导段提供非常好的协同初始条件,才能完成末制导段的协同,从而实现中远程拦截器的时间和空间协同。因此,协同中制导方法是中远程拦截器实现协同的前提和基础。
[0006]
目前,对协同中制导的理论研究成果鲜有报道,已经严重影响了多拦截器编队协同控制系统的研制。因此,提出一套适合工程应用的多拦截器协同中制导方法就显得非常迫切。
技术实现要素:
[0007]
为了克服现有技术的不足,本发明提供了一种针对空中机动目标的三维协同中制导方法,将虚拟碰撞点作为拦截器中制导阶段的目标点,同时考虑利用在中制导阶段通过外部传感器直接获得的目标的位置信息、速度信息和加速度信息设计协同中制导方法,并通过添加协同调节项确保所有拦截器的在中制导阶段结束时,几乎同时到达中末交接班区域。本发明结构简单,物理含义清晰,易于工程人员理解,同时具有协同项系数便于调节,制导律鲁棒性强等优点,易于工程实现。
[0008]
本发明解决其技术问题所采用的技术方案包括以下步骤:
[0009]
步骤1:建立多拦截器和目标的运动模型:
[0010][0011][0012][0013][0014]
其中,(x
i
,y
i
,z
i
)和(x
t
,y
t
,z
t
)分别代表第i个拦截器和目标在惯性坐标系三个坐标方向上的位置信息,(v
xi
,v
yi
,v
zi
)和(v
tx
,v
ty
,v
tz
)分别代表第i个拦截器和目标在惯性坐标系三个坐标方向上的速度信息,(a
xi
,a
yi
,a
zi
)和(a
tx
,a
ty
,a
tz
)分别代表第i个拦截器和目标在惯性坐标系三个坐标方向上的加速度信息,i=1,2,...,n,n代表拦截器的个数;
[0015]
步骤2:计算多拦截器到达目标的剩余时间t
goi
:
[0016][0017]
其中r
i
代表第i个拦截器到达目标的剩余距离,计算公式如下:
[0018][0019]
步骤3:计算虚拟碰撞点;
[0020]
设置虚拟碰撞点作为中制导阶段拦截器的目标点,虚拟碰撞点的计算如下:
[0021][0022]
其中,代表第i个拦截器的虚拟碰撞点;
[0023]
步骤4:计算三维惯性坐标系下拦截器加速度为:
[0024][0025]
其中,t
f
代表中制导结束时间,(v
tx
(t
f
),v
ty
(t
f
),v
tz
(t
f
))和(v
xi
(t
f
),v
yi
(t
f
),v
zi
(t
f
))分别代表目标和拦截器在惯性坐标系下三个方向的末速度,(p
xi
,p
yi
,p
zi
)代表协同项调节系数,代表所有拦截器虚拟碰撞点坐标的平均值,计算如下:
[0026][0027]
步骤5:设置协同项调节系数(p
xi
,p
yi
,p
zi
)为大于0的任意正实数,从而三维协同中制导律满足一致性要求。
[0028]
本发明提出的一种针对空中机动目标的三维协同中制导方法,能够确保中远程拦截器编队几乎同时到达中末交接班区域,为拦截器编队的协同末制导阶段提供良好的初始条件。本发明方法结构简单,物理含义清晰,易于工程人员理解,同时具有协同项系数便于调节,制导律鲁棒性强等优点,易于工程实现。
附图说明
[0029]
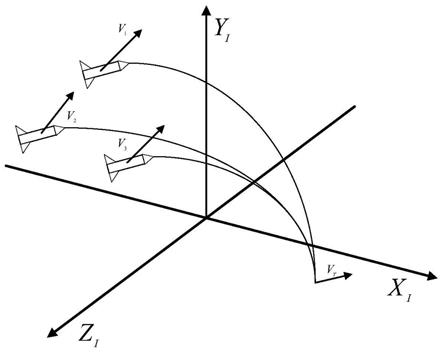
图1是本发明多个拦截器与目标在惯性系下的三维示意图。
[0030]
图2是本发明实施例各拦截器与目标的运动轨迹示意图。
[0031]
图3是本发明实施例各拦截器的剩余时间曲线示意图。
[0032]
图4是本发明实施例各拦截器的剩余距离曲线示意图。
[0033]
图5是本发明实施例拦截器1的加速度指令曲线示意图。
[0034]
图6是本发明实施例拦截器2的加速度指令曲线示意图。
[0035]
图7是本发明实施例拦截器3的加速度指令曲线示意图。
具体实施方式
[0036]
下面结合附图和实施例对本发明进一步说明。
[0037]
如图1所示,一种针对空中机动目标的三维协同中制导方法,包括如下步骤:
[0038]
步骤1:建立多拦截器和目标的运动模型:
[0039][0040][0041][0042][0043]
其中,(x
i
,y
i
,z
i
)和(x
t
,y
t
,z
t
)分别代表第i个拦截器和目标在惯性坐标系三个坐标方向上的位置信息,(v
xi
,v
yi
,v
zi
)和(v
tx
,v
ty
,v
tz
)分别代表第i个拦截器和目标在惯性坐标系三个坐标方向上的速度信息,(a
xi
,a
yi
,a
zi
)和(a
tx
,a
ty
,a
tz
)分别代表第i个拦截器和目标在惯性坐标系三个坐标方向上的加速度信息,i=1,2,...,n,n代表拦截器的个数;
[0044]
步骤2:计算多拦截器到达目标的剩余时间t
goi
:
[0045][0046]
其中r
i
代表第i个拦截器到达目标的剩余距离,计算公式如下:
[0047][0048]
步骤3:计算虚拟碰撞点;
[0049]
为了提高协同末制导对机动目标的拦截成功率,设置虚拟碰撞点作为中制导阶段拦截器的目标点,虚拟碰撞点的计算如下:
[0050][0051]
其中,代表第i个拦截器的虚拟碰撞点;
[0052]
步骤4:计算三维惯性坐标系下拦截器加速度为:
[0053][0054]
其中,t
f
代表中制导结束时间,(v
tx
(t
f
),v
ty
(t
f
),v
tz
(t
f
))和(v
xi
(t
f
),v
yi
(t
f
),v
zi
(t
f
))分别代表目标和拦截器在惯性坐标系下三个方向的末速度,(p
xi
,p
yi
,p
zi
)代表协同项调节系数,代表所有拦截器虚拟碰撞点坐标的平均值,计算如下:
[0055][0056]
步骤5:为了使协同中制导律达到协同一致性,协同项调节系数(p
xi
,p
yi
,p
zi
)为大于0的任意正实数。
[0057]
以x轴为例进行分析,y轴和z轴证明类似,具体证明如下:
[0058]
由一致性条件即所有拦截器的虚拟碰撞点在协同中制导阶段会趋于一致。因此,通过建立函数将一致性问题转化为当η
i
(t+
△
t)<η
i
(t)即η
i
(t)单调递减时,则η
i
(t)
→
0,从而
[0059]
接下来分析确保不等式η
i
(t+
△
t)<η
i
(t)的具体条件:
[0060]
由于
[0061][0062]
其中,b
i
=m
i
v
tx
,,代表所有的平均值。
[0063][0064]
由(10)和(11)式可得:
[0065][0066]
进一步可将a
xi
改写为a
xi
=a
bi-p
xi
a
ci
,其中:
[0067][0068]
由不等式η
i
(t+
△
t)<η
i
(t),
△
t>0可推出:
[0069][0070]
其中,o
i
=na
i
,w
i
=b
i
(2-d
i
(e
i-(x
t-x
i
)a
bi
))。
[0071]
接下来分析不等式(14)右边项是小于0的,从而p
i
选择任意大于0的实数可满足η
i
(t+
△
t)<η
i
(t)。
[0072]
由于一般情况下,v
tx
>0且x
t
>x
i
,可得:
[0073][0074]
因为可得:
[0075][0076]
b
i
=m
i
v
tx
<0
ꢀꢀꢀ
(17)
[0077]
在拦截器编队飞行过程中,因此可得
[0078][0079]
(e
i-(x
t-x
i
)a
xi
)d
i
<2
ꢀꢀꢀ
(19)
[0080]
由于a
bi
是a
xi
的一部分,可以近似处理为a
xi
≈a
bi
,因而获得:
[0081]
(e
i-(x
t-x
mi
)a
bi
)d
i
<2
ꢀꢀꢀ
(20)
[0082]
w
i
=b
i
(2-(e
i-(x
t-x
mi
)a
bi
)d
i
)<0
ꢀꢀꢀ
(21)
[0083]
从(16)、(18)和(21)式可获得
[0084][0085]
因此(p
xi
,p
yi
,p
zi
)可以选取任意大于0的实数,确保η
i
(t+
△
t)<η
i
(t)成立,从而三维协同中制导律满足一致性要求。
[0086]
本发明将虚拟碰撞点作为拦截器中制导阶段的目标点,同时考虑利用在中制导阶段通过外部传感器直接获得的目标的位置信息、速度信息和加速度信息设计协同中制导方法,并通过添加协同调节项确保所有拦截器的在中制导阶段结束时,几乎同时到达中末交接班区域。
[0087]
具体实施例:
[0088]
本实施例通过用3个拦截器同时攻击机动目标来验证所提出的三维协同中制导导引律的有效性。实施例中3个拦截器和目标的仿真初始条件:
[0089]
拦截器1:初始位置(1000m,9000m,-2300m),初始速度(1100m/s,100m/s,100m/s)
[0090]
拦截器2:初始位置(500m,8500m,-500m),初始速度(1000m/s,100m/s,90m/s)
[0091]
拦截器3:初始位置(2000m,7600m,3000m),初始速度(950m/s,60m/s,110m/s)
[0092]
目标:初始位置(100000m,8000m,1000m),初始速度(150m/s,10m/s,15m/s)
[0093]
选取显然(p
xi
,p
yi
,p
zi
)是大于0的正实数。
[0094]
图2为在三维平面下多拦截器与目标的轨迹,其中黑色实线为拦截器在协同中制导的轨迹,黑色点实线为拦截器为协同末制导阶段的轨迹。图3为所有拦截器的飞行剩余时间变化曲线。图4为所有拦截器与目标的剩余距离的变化曲线。图5到图7分别表示各拦截器的加速度指令变化曲线。从图2可以看出,本发明方法能确保所有拦截器几乎同时到达中末交班区域,为协同末制导提供了良好的初始条件,也为最终拦截机动目标提供的拦截环境。从图3到图4可以看出,本发明方法能确保所有拦截器的剩余时间与剩余距离在协同中制导阶段趋近收敛,达到一致的状态。从图5到图7可以看出本发明方法的加速度指令平滑,且数值较小,易于工程实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1