操作致动器系统的方法、致动器系统和飞行器与流程
1.本公开涉及一种操作致动器系统的方法,该致动器系统包括多个k,致动器,特别是mav
‑
vtol飞行器的各个推进单元。
2.本公开还涉及一种致动器系统,该致动器系统包括多个k,致动器,特别是mav
‑
vtol飞行器的各个推进单元。
3.本公开还涉及一种具有垂直起降(vtol)能力的、为多致动器飞行器(mav)形式的飞行器,该飞行器包括多个k,致动器,该致动器为用于使飞行器移动的推进单元的形式,并且该飞行器包括用于控制该致动器的飞行控制单元。
背景技术:
4.在过度确定的致动器系统中,例如为多致动器飞行器(mav)形式的飞行器,存在通过使用由致动器系统或飞行器的(飞行)控制单元执行的分配算法来实现给定的任务(例如,给定飞行方向)的不同的可能性。给定的任务可以以不同的方式/部分分配给不同的致动器,这些致动器可以设计成mav的各个推进单元。在本申请人提交的德国申请de 10 2019 101 903.6中描述了一种这样做的方法。通常而言,实施分配算法以在最小化所有致动器命令的平方和(l
‑
2范数)(为了能效)的同时找到对给定任务的解决方案。
5.迄今为止,在现有技术中没有描述考虑最小化所有致动器的最大功率需求的分配方法。这也称为所有致动器的l
‑
无穷范数。在分配中最小化所述l
‑
无穷范数会导致在过度确定的系统中的多个致动器之间更好的功率分配。
技术实现要素:
6.本公开的目的是提供一种方法、致动器系统和包括多个为推进单元形式的致动器的飞行器,其在降低最大需求命令功率的同时在致动器之间实现需求致动器命令功率的更好分配,从而在总能耗、成本、重量和/或尺寸方面对致动器系统的可能设计产生积极影响。
7.该目标是借助于具有本公开实施方式的特征的方法、借助于具有本公开实施方式的特征的致动器系统和借助于具有本公开实施方式的特征的飞行器来实现的。
8.在本公开其他实施方式中限定了有利的其他实施例。
9.根据本公开的第一方面,提供了一种操作致动器系统的方法,该致动器系统包括多个k,致动器,该致动器特别是mav
‑
vtol飞行器的各个推进单元,特别是电动致动器,其中,根据等式u=d
‑1(w)u
p
通过使用加权分配矩阵d(w),将用于控制致动器系统的期望控制命令分配给实际致动器命令其中d
‑1(w)是加权分配矩阵的逆,并且其中实际致动器命令u被应用于控制致动器,该方法包括:
10.a)根据实际致动器命令u确定特征值u
*
;
11.b)至少对于一些致动器,优选地对于所有致动器,确定相应致动器命令u
i
,i=1,2,
……
,k与所述特征值u
*
的偏差e
i
,i=1,2,
……
,k;
12.c)至少对于一些致动器,优选地对于所有致动器,根据该偏差e
i
的函数w
i
(e
i
),i=1,2,
……
,k,确定给定致动器的权重w
i
,i=1,2,
……
,k;以及
13.d)使用该权重w
i
来确定所述加权分配矩阵d(w)。
14.根据本公开的第二方面,提供了一种致动器系统,该致动器系统包括多个k,致动器,该致动器特别是mav
‑
vtol飞行器的各个推进单元,特别是电动致动器,并且该致动器系统包括用于使用期望控制命令控制该致动器系统的控制单元,该期望控制命令由该控制单元根据等式u=d
‑1(w)u
p
通过使用加权分配矩阵d(w)而分配给实际致动器命令其中d
‑1(w)是加权分配矩阵的逆,并且其中该实际致动器命令u由该控制单元应用于致动器,该控制单元适用于实现以下操作:
15.a)根据实际致动器命令u确定特征值u
*
;
16.b)至少对于一些致动器,优选地对于所有致动器,确定相应致动器命令u
i
,i=1,2,
……
,k与所述特征值u
*
的偏差e
i
,i=1,2,
……
,k;
17.c)至少对于一些致动器,优选地对于所有致动器,根据所述偏差e
i
的函数w
i
(e
i
),i=1,2,
……
,k,确定给定致动器的权重w
i
,i=1,2,
……
,k;以及
18.d)使用该权重w
i
来确定所述加权分配矩阵d(w)。
19.根据本公开的第三方面,提供了一种具有垂直起降(vtol)能力的、为多致动器飞行器(mav)形式的飞行器,该飞行器包括多个k,致动器,该致动器为用于使飞行器移动的推进单元的形式,并且该飞行器包括用于使用期望控制命令控制致动器的飞行控制单元,该期望控制命令由所述飞行控制单元根据等式u=d
‑1(w)u
p
通过使用加权分配矩阵d(w)而分配给实际致动器命令其中d
‑1(w)是加权分配矩阵的逆,并且其中该实际致动器命令u由控制单元应用至致动器,该飞行控制单元适用于实现以下操作:
20.a)根据实际致动器命令u确定特征值u
*
;
21.b)至少对于一些致动器,优选地对于所有致动器,确定相应致动器命令u
i
,i=1,2,
……
,k与所述特征值u
*
的偏差e
i
,i=1,2,
……
,k;
22.c)至少对于一些致动器,优选地对于所有致动器,根据所述偏差e
i
的函数w
i
(e
i
),i=1,2,
……
,k,确定给定致动器的权重w
i
,i=1,2,
……
,k;以及
23.d)使用该权重w
i
来确定所述加权分配矩阵d(w)。
24.如果致动器系统是过度确定的,那么在解决给定任务的同时,仍然可以使所有致动器的l
‑
2范数最小化,以使加权分配算法中的能耗最小。为每个致动器分配权重用于使致动器命令的l
‑
无穷范数最小化,使得所有致动器的最大控制需求降低。
25.现在将进一步详细说明作为本公开基础的基本物理和数学考虑:
26.在本说明书中,“多致动器飞行器(mav)”是指这样一种飞行平台,即,该飞行平台的升降和所有其他移动能力是通过分布在机上的致动器系统(包括多个推进单元)来实现的。
27.在本说明书中,“垂直起降(vtol)
‑
mav”是指能够以几乎或完全为零的水平速度在悬停状态下起飞和降落的飞行平台。
28.在本说明书中,“过度确定的mav”是指拥有冗余数量的致动器以便完成特定任务的飞行平台。
29.在本说明书中,“欠驱动的mav”是指不能在其所有维度互相独立(或分离)的操作空间中(例如,3d,即3个平移和3个旋转)中执行所有移动任务的飞行平台。
30.例如,现成的四旋翼vtol(所有致动器都朝上)是欠驱动的vtol
‑
mav,因为它需要倾斜(滚动和/或俯仰)才能水平移动(耦合维度)。然而,可以彼此独立地执行垂直或偏航运动。注意,四旋翼飞行器可以直接控制滚动、俯仰、偏航和垂直运动;因此控制六个维度中的四个维度(在3d中)。
31.例如,现成的八旋翼vtol(所有致动器都朝上)是过度确定的欠驱动vtol
‑
mav,因为它执行与四旋翼相同的任务,但是有八个致动器。
32.例如,由申请人设计的带有18个致动器的也必须被认为是过度确定但欠驱动的vtol
‑
mav。
33.注意:在上述示例中,致动器相对于飞行器本体的倾斜角被忽略,即,旋翼被视为以线性相关的方式对齐(或具有较小的倾斜角),例如,旋翼都(明显地)面朝上。
34.对于mav
‑
vtol的控制,在飞行器的飞行控制单元中使用了反馈控制算法,该反馈控制算法计算出所需的控制值,例如,针对欠驱动的mav
‑
vtol,所需的滚动、俯仰、偏航扭矩(单位:nm)和推力(单位:n)。通常,这样的四个值都被放在所谓的的向量中,其中,m=4,其中,右下标“p”代表“伪命令”。发送至致动器的实际命令用表示,其中针对八旋翼,k=8,针对k=18。在控制分配期间,将期望的伪命令u
p
分配给实际致动器命令其中针对过度确定的mav
‑
vtol,k>m。
35.在飞行器的对应实施方式中,飞行控制单元可以连接至飞行器的传感器系统,以用于根据(反馈)控制定律确定所述期望控制命令
36.根据u
p
计算u的常用方法是使用分配矩阵的伪求逆,该分配矩阵在这里用d表示,并且可以包含以下信息:
37.‑
致动器相对于mav的本体固定框架的相应的几何定位(位置和取向);
38.‑
致动器的物理能力,例如,致动器在其各自位置处施加的力(n)和扭矩(nm);
39.‑
物理能力(n,nm)与实际命令单位(即u)之间的关系。
40.例如,标准的旋翼(或例如由无刷电动机驱动的螺旋桨)通常接受rpm(或弧度/秒)命令,因为大多数现成的无刷电动机是通过速度命令驱动的(因为跟踪速度命令更鲁棒)。因此,可以根据旋翼的空气动力学特性定义rpm与旋翼的生成力和扭矩之间的关系,例如,
[0041][0042][0043]
其中,f
i
是第i个旋翼沿着旋转轴产生的升力,τ
i
是第i个旋翼的旋转轴周围的阻力扭矩。可以根据旋翼的空气动力学特性,识别参数
[0044]
出于控制目的,通常假设p3=q3=0。
[0045]
前述分配矩阵可以表示为由以下限定:
[0046]
u
p
=du
ꢀꢀꢀ
(等式2)
[0047]
其中因此,实际致动器命令可根据所需的伪命令计算,如下所示:
[0048]
u=d
‑1u
p
ꢀꢀꢀ
(等式3)
[0049]
由于k≠m,所以分配矩阵的逆是某种伪逆。针对过度确定的系统,例如在k>m的情况下,这样的求逆导致多于一个的解。
[0050]
解决此问题的常用方法是通过优化某些准则来解决伪逆,例如,使u的l
‑
2范数最小化的摩尔
‑
彭若斯(moore
‑
penrose)逆,即这样可以确保找到能量最佳的解决方案(例如,在u为转子的rpm的情况下,u的l
‑
2范数与动能有关)。
[0051]
然而,使命令致动器输入的l
‑
2范数最小化并不能保证所有致动器命令的上确界也被最小化。
[0052]
在本说明书中,集合的“上确界”是其所有实体的最大值:sup(u)=max(u),并且表示特定的特征值u
*
。
[0053]
使所有致动器命令的上确界最小化可以对设计有很大的影响:如果可以找到具有减小的sup(u)的等效解决方案,这意味着较不强大的致动器将足以完成给定的任务。注意,由于一般情况下(如带旋翼的mav),致动器所需的功率随着致动器命令u单调增加,sup(u)的减小意味着该致动器的最大功耗降低。能够使用较不强大的致动器对整个致动器/飞行器系统的成本和重量有直接影响。
[0054]
在本公开中,提出了一种控制分配算法,该算法:
[0055]
‑
确保提供所需的u
p
,
[0056]
‑
实现能量最佳(通过使u的l
‑
2范数最小化),
[0057]
‑
降低了最大功率需求,从而允许设计最优化(通过u的l无穷范数的最小化)。
[0058]
上面提到的前两项可以使用标准方法来实现,例如第一项使用状态反馈控制,而第二项通过分配矩阵的伪求逆。此外,在本公开的上下文中,使用以下形式的加权求逆:
[0059]
u=d
‑1(w)u
p
ꢀꢀꢀ
(等式4)
[0060]
其中,可能的加权求逆可以采取该形式,从而获得能量最小化的解:
[0061]
d
‑1(w)=w
‑1d
t
(dw
‑1d
t
)
‑1ꢀꢀꢀ
(等式5)
[0062]
其中,可能的权重矩阵w为对角矩阵,例如,
[0063][0064]
每个致动器可以被赋予不同的权重,其中值w
i
的范围在0与1之间,即权重为零(0)意味着“惩罚”该单个致动器,并且将其排除在解之外,而权重为一(1)意味着该致动器完全包含在解中。
[0065]
在本公开的一个实施方式中,建议基于致动器(分别)与为所有致动器命令的平均值形式的特征值u
*
偏离的程度来对致动器进行加权。因此,整个致动器命令的平均值被用作“期望平衡”,这意味着寻找一个分配解决方案,其中命令和所需功率在多个致动器之间平均分配。这种方法可以用于当那些需要比特征值u
*
(即所述平均值)更多的功率的致动器的需求量相对于平均需求量进一步增加时,可以通过减小它们的权重来“惩罚”那些致动
器。
[0066]
因此,在根据本公开的方法的另一实施方式中,所述特征值u
*
是整个致动器命令u的平均值,即,u
*
=u
mean
=mean(u)。
[0067]
注意,这假设了致动器命令与致动器需求之间的直接联系,前提是在致动器命令随其需求单调增加(如果致动器的需求增加,则应以不断增加的命令值来命令该致动器,以满足该需求)这一合理假设。因此,这种方法(有利地)不需要使用来自致动器的任何数据来实现该方法。然而,如果来自致动器的数据可用,则可以提高该方法的质量。在这种情况下,可以使用当前测量的致动器状态以便验证一个或多个致动器的过度使用,或者u和u
*
可以从致动器的传感器数据(如果可用)获得,而不是使用计算出的u和u
*
。本方法不依赖于这些测量,但是如果致动器状态数据可用,则可以对其进行改进。
[0068]
u
mean
=mean(u)可以被定义为所有致动器命令的平均值。将每个致动器的命令值u
i
与所述平均值之间的差异纳入考虑,每个致动器的归一化(normalized)误差可以被定义为与所述平均值之间的差异纳入考虑,每个致动器的归一化(normalized)误差可以被定义为如果e
i
>0,则可以按照w
i
(e
i
)计算第i个致动器的权重,该w
i
(e
i
)是归一化误差(或与平均值的正偏离)的函数。随着e
i
值的增加,可以减小w
i
。优选地,如果e
i
≤0,则w
i
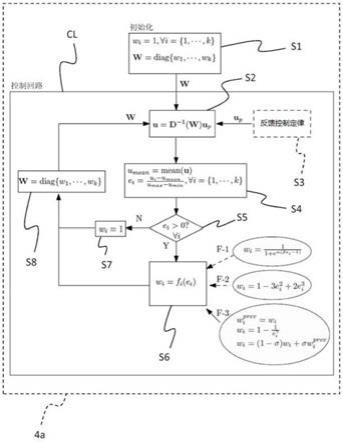
=1。然后,这些权重用于解决由(飞行)控制单元执行的控制迭代的下一周期中的分配问题(针对算法的详细说明,参见图5)。
[0069]
如前所述,在根据本公开的方法的对应的另外实施方式中,所述偏差e
i
是通过下式确定的归一化偏差:
[0070][0071]
其中,u
max
是致动器命令u
i
的(可命令的)最大值,u
min
是致动器命令u
i
的(可命令的)最小值(针对第i个致动器,即,如果飞行器由具有相同规格的致动器组成,则存在一个u
max
和一个u
min
)。
[0072]
在根据本公开的方法的另一实施方式中,如果对应的偏差e
i
大于给定值,例如零,即e
i
>0,则计算权重w
i
。
[0073]
在根据本公开的方法的另一实施方式中,如果对应的偏差e
i
等于或小于给定值,例如零,即e
i
≤0,则将权重w
i
设置为默认值,特别是w
i
=1。
[0074]
在根据本公开的方法的又一实施方式中,针对对应偏差e
i
的值增加,减小权重w
i
。
[0075]
在根据本公开的方法的优选实施方式中,在给定时间确定的权重w
i
用于在该方法的后续迭代步骤期间求解方程u=d
‑1(w)u
p
。
[0076]
可能的加权函数有:
[0077]
‑
各种sigmoid函数。参见图2,以形式的sigmoid式(sigmoid
‑
like)加权函数,其中针对α和β的不同值进行绘图。这里,e
x
是欧拉(euler)指数。
[0078]
‑
多项式函数。参见图3,加权多项式w
i
=1
‑
3e
i2
+2e
i3
与具有α=6和β=2的上述sigmoid式函数的比较。
[0079]
‑
低通滤波指数函数。参见图4,指数衰减加权函数(实线)为低通滤波指数函数。参见图4,指数衰减加权函数(实线)为其中γ=4,以及其根据w
i
=(1
‑
σ)w
i
+σw
iprev
,其中σ=0.99的低通滤波版本(虚线)。注意γ和σ都是正值设计参数。w
iprev
表示来自先前迭代步骤的权重。
[0080]
注意,由于加权算法(如果(if)/否则(else))不连续,因此零误差附近的平滑度很重要。低通滤波指数加权函数在这个区域提供平滑度,也在由于例如算法中其他if/else命令导致加权函数中出现其他人为离散跳跃的情况下提供平滑度。因此,特别推荐使用低通滤波指数函数。
[0081]
低通滤波器也可以和上面提到的其他加权函数一起使用。
[0082]
因此,在根据本公开的方法的另一实施方式中,通过使用加权函数来确定权重w
i
(e
i
),该加权函数优选为:
[0083]
a)sigmoid函数,e
x
是欧拉指数;
[0084]
b)多项式函数,w
i
=∑
j
a
j
e
ij
;或者
[0085]
c)指数函数,1
‑
1/e
iγ
。
[0086]
在根据本公开的方法的又一个实施方式中,加权函数是低通滤波的,优选根据下式进行低通滤波:
[0087]
w
i
=(1
‑
σ)w
i
+σw
iprev
,
[0088]
其中σ<1,例如σ=0.99,其中prev表示操作方法中来自先前迭代步骤的先前的、优选的直接为前一个的权重。
[0089]
在致动器系统或飞行器的其他实施方式中,所述(飞行)控制单元还适于实现上述作为本公开方法的其他实施方式的其他方法步骤中的任意一者。
[0090]
优选地,在飞行器的另一实施方式中,推进单元是电驱动的。最优选地,推进单元被设计为单独的电动推进器单元。
[0091]
通过本公开,致动器之间存在改进的功率分配,这意味着增强的热分布和更少的单个致动器的过度使用等。此外,由于最大功率是用于致动器的直接设计标准,因此使最大致动器最小化可以直接影响飞行器的尺寸和重量。
附图说明
[0092]
现在将结合附图阐述本公开的其他特征和优点,在附图中,
[0093]
图1示出了根据本公开的致动器系统;
[0094]
图2示出了具有不同参数的sigmoid式加权函数;
[0095]
图3示出了与sigmoid式加权函数相比的多项式加权函数;
[0096]
图4示出了指数衰减加权函数及其低通滤波版本;以及
[0097]
图5示出了加权算法的实施方式。
具体实施方式
[0098]
在图1中,附图标记1表示包括多个致动器2的致动器系统,该多个致动器2表示为2.i,i=1,
……
,k;这些致动器可以被设计为飞行器10的各个推进单元,特别是电
动mav
‑
vtol的各个推进单元,如示例性方式所示。部分或所有致动器2可以包括用于确定相应致动器(例如致动器2.k)的使用参数(温度、功耗、噪声水平、rpm、扭矩等)的传感器装置3。致动器2由(飞行)控制单元4控制,该控制单元4包括算法装置4a,其根据期望命令或伪命令(表示为u
p
→
u)确定致动器命令u(u
i
),即对于致动器2中的每一个具有单独命令分量的命令向量。所述致动器命令u(u
i
)被用来控制致动器2以便利用整个致动器系统1(飞行器10)实现给定任务,例如飞行操控。
[0099]
如上详细所述,传感器装置3可以用于通过向控制单元4提供致动器反馈来改善系统性能。
[0100]
本公开提出,当将用于控制致动器系统的期望控制命令分配给实际致动器命令时,针对各个致动器2使用权重。为此,它根据等式u=d
‑1(w)u
p
,利用加权分配矩阵d(w),其中d
‑1(w)是加权分配矩阵的逆,并且其中,实际致动器命令u用于控制致动器2。优选地,矩阵w=w(w
i
)包括取决于偏差e
i
的各个致动器权重w
i
,该偏差e
i
是由下式确定的归一化偏差:
[0101][0102]
其中,u
max
是致动器命令u的(可命令的)最大值,u
min
是致动器命令u的(可命令的)最小值。值u
*
优选地是全部致动器命令u的平均值,即,u
*
=u
mean
=mean(u)。
[0103]
可以使用加权函数来确定权重w
i
(e
i
),根据该加权函数,如果对应的偏差e
i
大于零,即e
i
>0,则计算权重w
i
,0≤w
i
≤1。
[0104]
如果对应的偏差e
i
等于或小于零,即e
i
≤0,则权重w
i
可以被设置为默认值,特别是w
i
=1。此外,针对对应偏差e
i
的值的增加,减小权重w
i
。
[0105]
图2示出了具有不同参数的可能的sigmoid式加权函数。函数的解析表达式为其中,5≤α≤10,2≤β≤5。注意,e
i
始终是正的归一化误差。“e
x”表示欧拉指数。
[0106]
图3显示了可能的多项式加权函数(实线)w
i
=1
‑
3e
i2
+2e
i3
(具有较浅的斜率)和sigmoid式加权函数(虚线,斜率更陡)其中α=6,β=2。同样,“e
x”表示欧拉指数,e
i
是正归一化误差。
[0107]
图4显示了指数衰减加权函数其中γ=4(实线)及其通过w
i
=(1
‑
σ)w
i
+σw
iprev
的低通滤波版本(虚线),其中σ=0.99。同样,e
i
是正归一化误差。低通滤波加权函数可以是优选的,因为它们可以平滑加权算法(if/else)中的不连续性,从而提高零误差附近的平滑度,这一点很重要。特别地,如图4所示的低通滤波指数加权函数可以在这个区域提供平滑度,也可以在由于例如算法中其他if/else命令导致加权函数出现其他人为离散跳跃的情况下提供平滑度。因此,特别推荐使用低通滤波指数函数。
[0108]
图5示出了用于降低致动器系统,优选地,在本公开中使用的致动器系统中的全部致动器命令的最大值(l
‑
无穷大)的加权算法4a的实现方式(参见图1)。步骤s1是初始化步骤。初始化只发生一次,而框cl中的所有内容都在控制回路中,即在致动器使用期间重复执
行这些步骤。然后将初始化的权重矩阵w提供给分配步骤s2,如图所示该步骤根据u
p
计算u。u
p
是根据如在s3处以通用形式所示的(反馈)控制定律得出的。在s4处,计算平均命令值u
mean
和偏差e
i
。在s5处,确定e
i
>0是否成立。如果是(y),则在s6处使用适当的加权函数计算w
i
。在f
‑
1至f
‑
3处显示了三种不同的加权函数。注意,这是取决于e
i
>0是否成立来针对每个致动器i=1,
……
,k单独进行的。如果不是(n),则在s7处将w
i
(针对给定的致动器)设置为默认值1。在s8处使用w
i
填充新矩阵w,然后在分配期间在s2处使用该矩阵w。在致动器系统运行期间,重复执行步骤s2至s8。在s2处计算的命令向量u用于控制致动器2(参见图1)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1