一种积木机器人控制系统及其控制方法与流程
1.本发明涉及机器人技术领域,具体涉及一种积木机器人控制系统及其控制方法。
背景技术:
2.目前在教育领域,可搭建积木是一种被广泛应用的锻炼创造力、空间思维能力、社交等能力的玩耍工具,这些物理实体积木通过不同的组装与连接方式,可以搭建出各种不同的实体模型,当前市场上很多该编程套件通常需要通过数据线连接传感器、驱动器与一个可编程主机,从而传递所需要的命令与信息,这些连接线不仅限制了搭建成品的物理尺寸,同时也增加了系统的复杂度,使儿童在实用的过程中容易遇到更大的困难。
3.作为儿童智能积木机器人的主控制器,若需要驱动其配套的外设如电机、舵机、传感器等,传统方法要么在主控制器上通过物理按键触发,或者通过额外购买适配的遥控器触发,存在方式固定、参数不可调、诸如传感器双向数据采集交互不直观等问题。
技术实现要素:
4.本发明的目的在于针对现有技术的缺陷和不足,提供一种积木机器人控制系统及其控制方法,它借助android或ios智能设备自带的蓝牙ble功能连接主控制器的蓝牙即可实现交互,以app模式呈现,具有使用方便,搭接方式多样等特点。
5.为实现上述目的,本发明采用以下技术方案是:一方面,本发明提供一种积木机器人控制系统,它包含传感器、主控模块1、电机驱动模块、直流电机、数据处理模块、蓝牙模块、手机移动终端和云端处理器,所述传感器与主控模块1通过无线方式连接,所述的电机驱动模块连接主控模块1与直流电机,所述的主控模块1通过蓝牙与手机移动终端连接,所述的主控模块1通过互联网与云端处理器连接,所述的手机移动终端包含摄像头,所述的摄像头用于捕获摄像画面,所述的画面通过互联网有手机移动终端传输至云端处理器,所述的主控模块1包含数据采集模块、数据处理模块和蓝牙模块,所述的数据采集模块通过2.4g通道传输接收传感器采集的数据,所述的数据处理模块用于接收数据采集模块发送的传感器采集的信息,还用于与蓝牙模块进行数据交互,所述的蓝牙模块用于与手机移动终端进行无线数据交互,所述的手机移动终端上安装有与主控模块1进行数据交互的app,所述的数据交互的app采用深度定制的blockly图形化编程来进行ui交互。
6.根据本发明另一方面,还提供一种积木机器人控制方法,它包含以下三种交互模式:
7.1)普通编程控制模式,所述的普通编程控制模式包含以下步骤:
8.步骤s001,预编译图形方块,在所有图形方块在执行之前,app均已定义成与其功能相关的javascript字符串,对图形方块进行预编译,抽取对应映射的javascript字符串,按照app中间蓝色区域编辑好的序列由上至下依次累加组合成一个最终javascript字符串;
9.步骤s002,将预编译好的javascript字符串转换为运行时的javascript代码并校
验其语法;
10.步骤s003,将运行时的javascript代码逐语句执行并高亮当前所映射关联的图形方块;
11.2)传感器实时交互模式,所述的传感器实时交互模式包含以下步骤:
12.步骤s004,执行步骤001和步骤002程序;
13.步骤s005,执行传感器相关功能,通过本系统搜索添加无线传感器,连接无线传感器与主控模块1;
14.步骤s006,主控模块1发送读取特定传感器功能的蓝牙指令,并开启重复轮询,等待主控制器上报连续的传感器数据;
15.步骤s007,主控模块1通过2.4g通道连续采集到传感器数据,并通过蓝牙通道主动汇报至手机移动终端,并在app界面处进行展示,app系统根据用户编辑的传感器数据逻辑判断图形方块不同,分发到不同的条件分支,进行执行相应的动作。条件分支执行完毕后重置采集到的传感器数据结果,继续下一轮传感器数据采集;
16.3)ai控制实时交互模式,所述的ai控制实时交互模式包含以下步骤:
17.步骤s008,执行步骤001和步骤002程序;
18.步骤s009,手机移动终端开启轮询识别,首先执行ai识别的图形方块,并选择打开手机移动终端系统app依赖的自带摄像头进行预览取景,在等待指定超过时间之后,将当前捕获的摄像画面上报云端分析,并将识别结果回调给相关图形方块所依据的存储变量;
19.步骤s010,根据系统识别检测结果,分发到不同的条件判断图形方块分支,进而执行相应的动作。条件分支执行完毕后重置识别结果,继续下一轮识别。
20.本发明的工作原理:本发明针对智能积木机器人的主控模块1通讯方式采用蓝牙ble通讯,手机移动终端的控制系统借助android或ios智能设备自带的蓝牙ble功能连接主控模块1的蓝牙以实现数据交互,并以app模式呈现。本控制系统采用深度定制的blockly图形化编程来进行ui交互,其界面的左侧为候选菜单列表,用户可以拖拽相应的图形方块到中间蓝色空白编辑区,并且可以对其进行相应的参数设定,多个图形方块通过由上至下依次连接形成编程执行序列,通过按下执行按钮,则系统实时逐编程方块高亮执行。
21.本发明在与传感器实时交互时,主控模块1通过2.4g通道采集传感器数据,并将采集到的数据通过蓝牙通道传至手机移动终端控制系统中,然后数据在控制系统中依图像模块逻辑执行,执行输出通过主控模块1驱动直流电机输出。
22.本发明在使用ai控制的实时交互时,利用手机移动终端自动的摄像头进行预览取景,并将取景的数据通过互联网传至云端控制器,云端控制器通过对该取景进行识别分析,并识别结果回传至手机移动终端系统,手机移动终端系统将数据解码后将按照图像模块逻辑执行,执行输出通过主控模块1驱动直流电机输出。
23.采用上述技术方案后,本发明有益效果为:本发明利用主控模块1作为积木的驱动中心,手机移动终端作为积木的大脑,实现了对积木操控的智能化和简洁化,并通过交互式界面并通过层级式编程结构,使儿童轻松搭建处各式各样的交互装置,提高学习兴趣,锻炼了儿童的逻辑开发能力。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
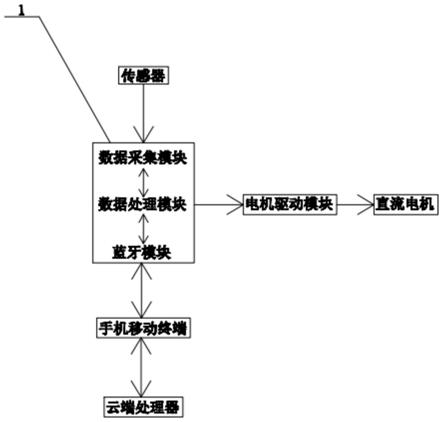
25.图1是本发明的结构示意图。
26.附图标记说明:主控模块1。
具体实施方式
27.参看图1所示,本具体实施方式采用的技术方案是:本发明提供一种积木机器人控制系统,它包含传感器、主控模块1、电机驱动模块、直流电机、数据处理模块、蓝牙模块、手机移动终端和云端处理器,所述传感器与主控模块1通过无线方式连接,所述的电机驱动模块连接主控模块1与直流电机,所述的主控模块1通过蓝牙与手机移动终端连接,所述的主控模块1通过互联网与云端处理器连接,所述的手机移动终端包含摄像头,所述的摄像头用于捕获摄像画面,所述的画面通过互联网有手机移动终端传输至云端处理器,所述的主控模块1包含数据采集模块、数据处理模块和蓝牙模块,所述的数据采集模块通过2.4g通道传输接收传感器采集的数据,所述的数据处理模块用于接收数据采集模块发送的传感器采集的信息,还用于与蓝牙模块进行数据交互,所述的蓝牙模块采用ble蓝牙模块,所述的蓝牙模块用于与手机移动终端进行无线数据交互,所述的手机移动终端上安装有与主控模块1进行数据交互的app,所述的数据交互的app采用深度定制的blockly图形化编程来进行ui交互。
28.根据本发明提供一种积木机器人控制方法,它包含以下三种交互模式:
29.1)普通编程控制模式,所述的普通编程控制模式包含以下步骤:
30.步骤s001,预编译图形方块,在所有图形方块在执行之前,app均已定义成与其功能相关的javascript字符串,对图形方块进行预编译,抽取对应映射的javascript字符串,按照app中间蓝色区域编辑好的序列由上至下依次累加组合成一个最终javascript字符串;
31.步骤s002,将预编译好的javascript字符串转换为运行时的javascript代码并校验其语法;
32.步骤s003,将运行时的javascript代码逐语句执行并高亮当前所映射关联的图形方块,通过app界面可以看到积木机器人执行运动效果,且积木机器人运行状态与发送蓝牙ble指令的图形方块保持同步。
33.2)传感器实时交互模式,所述的传感器实时交互模式包含以下步骤:
34.步骤s004,执行步骤001和步骤002程序;
35.步骤s005,执行传感器相关功能,通过本系统搜索添加无线传感器,连接无线传感器与主控模块1,当界面出现无线传感器实时剩余电量时说明当前无线传感器已经跟主控制器连接可以正常通讯。
36.步骤s006,主控模块1发送读取特定传感器功能的蓝牙指令,并开启重复轮询,等待主控制器上报连续的传感器数据;
37.步骤s007,主控模块1通过2.4g通道连续采集到传感器数据,并通过蓝牙通道主动汇报至手机移动终端,并在app界面处进行展示,app系统根据用户编辑的传感器数据逻辑判断图形方块不同,分发到不同的条件分支,进行执行相应的动作。条件分支执行完毕后重置采集到的传感器数据结果,继续下一轮传感器数据采集;
38.3)ai控制实时交互模式,所述的ai控制实时交互模式包含以下步骤:
39.步骤s008,执行步骤001和步骤002程序;
40.步骤s009,手机移动终端开启轮询识别,首先执行ai识别的图形方块,并选择打开手机移动终端系统app依赖的自带摄像头进行预览取景,在等待指定超过时间之后,将当前捕获的摄像画面上报云端分析,并将识别结果回调给相关图形方块所依据的存储变量;
41.步骤s010,根据系统识别检测结果,分发到不同的条件判断图形方块分支,进而执行相应的动作。条件分支执行完毕后重置识别结果,继续下一轮识别。
42.本发明针对智能积木机器人的主控模块1通讯方式采用蓝牙ble通讯,手机移动终端的控制系统借助android或ios智能设备自带的蓝牙ble功能连接主控模块1的蓝牙以实现数据交互,并以app模式呈现。本控制系统采用深度定制的blockly图形化编程来进行ui交互,其界面的左侧为候选菜单列表,用户可以拖拽相应的图形方块到中间蓝色空白编辑区,并且可以对其进行相应的参数设定,多个图形方块通过由上至下依次连接形成编程执行序列,通过按下执行按钮,则系统实时逐编程方块高亮执行,停止时只需点击界面上的停止方块。
43.在与传感器实时交互时,主控模块1通过2.4g通道采集传感器数据,并将采集到的数据通过蓝牙通道传至手机移动终端控制系统中,然后数据在控制系统中依图像模块逻辑执行,执行输出通过主控模块1驱动直流电机输出或通过总线驱动连接于主控模块1上的舵机。
44.在使用ai控制的实时交互时,利用手机移动终端自动的摄像头进行预览取景,并将取景的数据通过互联网传至云端控制器,云端控制器通过对该取景进行手势识别分析,并识别结果回传至手机移动终端系统,手机移动终端系统将数据解码后将按照图像模块逻辑执行,执行输出通过主控模块1驱动直流电机输出或通过总线驱动连接于主控模块1上的舵机。
45.以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1