基于CAN总线结构的直升机串联舵机控制系统及控制方法与流程
基于can总线结构的直升机串联舵机控制系统及控制方法
技术领域
1.本发明属于航空技术领域,涉及一种基于can总线结构的直升机串联舵机控制系统及控制方法。
背景技术:
2.直升机自动飞行控制系统是一种用于自动驾驶和引导的自动化设备,可以减轻直升机驾驶员的操作强度,改善直升机的操纵品质。直升机自动飞控系统的执行机构一般由串联舵机和并联舵机组成,以往串联舵机的控制系统包含了闭环控制、功率驱动等功能组件,系统组件多,抗干扰能力差,测试性和维护性不好。
技术实现要素:
3.本发明的目的是:提出一种基于can总线结构的直升机串联舵机控制系统及控制方法,简化舵机控制系统,提高集成化程度,提高测试性和维护性,增强抗干扰能力。
4.本发明的技术方案:
5.基于can总线结构的直升机串联舵机控制系统,包括飞控计算机、若干个串联舵机以及接线模块,飞控计算机、串联舵机作为节点设备连接在接线模块上,形成星型物理分布的can总线系统。
6.进一步,所述的串联舵机的控制系统双余度配置,当主控通道失效的情况下可转入备份通道工作,提高控制系统的安全性和任务可靠性。
7.进一步,所述的飞控计算机是主节点,其它若干个串联舵机是次要节点。
8.进一步,飞控计算机与串联舵机之间采用应答方式交换数据。
9.进一步,所述的接线模块设置在直升机机舱中,接线模块对外有多个接口,通过接口的两个点与节点设备连接,实现了can总线的星型拓扑结构。
10.进一步,can总线系统通讯模式为全双工,通讯速率500kbps,can总线数据使用29位标识符,并且节点设备之间can总线数据交换使用数据帧传输。
11.进一步,can总线系统的通信协议的帧结构以can2.0b的帧结构为基础,包含起始位、仲裁域、控制位、数据域、crc位、应答位和结束位,总线信息标识符采用静态分配。
12.进一步,飞控计算机按照20ms的固定周期,定时向串联舵机发送控制指令,串联舵机在收到控制指令后立即响应指令,串联舵机延迟2.5ms后,按照0.5ms的周期,向飞控计算机返回其位置信息和监控信息。
13.直升机串联舵机控制系统的控制方法,所述的监控信息通过串联舵机的模型监控计算得到,具体计算过程包括以下步骤:
14.步骤1:计算串联舵机模型一个控制周期内的位移s,s=v
×
tj,其中v是串联舵机理论速度,tj是串联舵机控制周期;
15.步骤2:将串联舵机模型一个控制周期内的位移s转换为电压u,u=s
×
xk,其中xk是串联舵机电压/位移转换比例因子;
16.步骤3:计算串联舵机模型反馈因子pm,pm=u
÷
p,其中,p为串联舵机控制电路的开环增益;
17.步骤4:计算当前控制周期的串联舵机输入指令位置xin与前一控制周期的串联舵机模型位置y(n-1)的差值δ,δ=xin-y(n-1);
18.步骤5:计算串联舵机模型增益p0;
19.如果δ≥0,p0=p,如果δ<0,p0=-p;
20.步骤6:计算当前控制周期串联舵机模型位置y(n),y(n)=y(n-1)+p0×
pm;
21.步骤7:反馈监控信息,具体为:计算当前控制周期串联舵机模型位置y(n)与当前控制周期的位置反馈pos的差值,并将差值与模型监控位置阈值δm比较,如果差值的绝对值大于δm,计数变量e加1,如果差值的绝对值小于等于δm,计数变量e减1,计数变量e的最小值为0,当计数变量e大于计数阈值n,串联舵机向飞控计算机报模型监控故障,当计数变量e小于等于计数阈值n,串联舵机向飞控计算机报模型监控正常。
22.本发明的有益效果:
23.本发明活门阀关紧动作可靠,结构简单,相对于其他活门阀关紧方法本发明体积小,成本显著降低。
附图说明
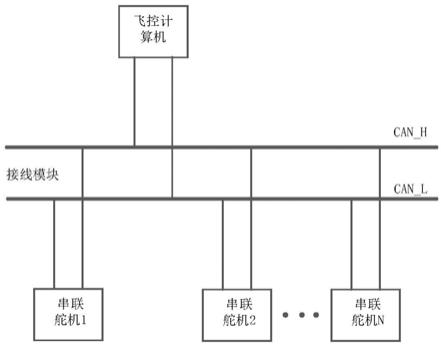
24.图1是本发明控制系统结构示意图;
25.图2是can总线标示符结构示意图。
具体实施方式
26.下面对照附图,通过对实施例的描述,对本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解:
27.本发明的第一个实施例:
28.实施例1,基于can总线结构的直升机串联舵机控制系统,包括飞控计算机、若干个串联舵机以及接线模块,飞控计算机、串联舵机作为节点设备连接在接线模块上,形成星型物理分布的can总线系统,所述的串联舵机的控制系统双余度配置,当主控通道失效的情况下可转入备份通道工作。提高了控制系统的安全性和任务可靠性,所述的飞控计算机是主节点,其它若干个串联舵机是次要节点。次要节点可以根据需要增减,提高了系统配置的灵活性,飞控计算机与串联舵机之间采用应答方式交换数据,保证can总线数据收发不出现冲突,所述的接线模块设置在直升机机舱中,接线模块对外有多个接口,通过接口的两个点与节点设备连接,实现了can总线的星型拓扑结构。使用星型拓扑结构可以方便增减次要节点设备,而不影响整个can总线系统。
29.进一步,can总线系统通讯模式为全双工,通讯速率500kbps,can总线数据使用29位标识符,并且节点设备之间can总线数据交换使用数据帧传输,can总线系统的通信协议的帧结构以can2.0b的帧结构为基础,包含起始位、仲裁域、控制位、数据域、crc位、应答位和结束位,总线信息标识符采用静态分配,飞控计算机按照20ms的固定周期,定时向串联舵
机发送控制指令,串联舵机在收到控制指令后立即响应指令,串联舵机延迟2.5ms后,按照0.5ms的周期,向飞控计算机返回其位置信息和监控信息。
30.实施例2:图1为本发明单通路各个节点can总线挂载简图,节点包括了一个飞控计算机和若干个串联舵机,以及一个接线模块。在星型物理分布的can总线设备中,以接线模块为中心,节点设备通过电缆与接线模块连接,飞控计算机、串联舵机作为节点设备组成can总线系统。串联舵机控制系统双余度配置,主控通道失效的情况下可转入备份通道工作。
31.接线模块对外有多个接口,通过接口的两个点与节点设备的电缆相连可以构成一条总线,节点设备通过电缆连接到总线上即实现了总线的星型拓扑结构。
32.飞控计算机是主节点,其它若干个串联舵机是次要节点,飞控计算机必须挂载总线上,串联舵机可以根据需要增减。
33.can总线通讯模式为全双工,通讯速率500kbps,can总线数据使用29位标识符,并规定节点之间数据交换只能使用数据帧,不能使用远程帧传输。协议的帧结构以can2.0b的帧结构为基础,包含起始位、仲裁域、控制位、数据域、crc位、应答位和结束位。总线信息标识符采用静态分配,图2为can总线标示符结构。
34.飞控计算机与串联舵机之间采用应答方式交换数据。系统中飞控计算机作为唯一的主控单元,通过can总线与串联舵机进行数据交换。在实际工作中,飞控计算机按照固定周期(20ms)定时向串联舵机发送控制信息,串联舵机在收到控制指令后立即响应指令,延迟固定时间(2.5ms)后,间隔0.5ms,返回其位置和状态信息。
35.实施例3:
36.直升机串联舵机控制系统的控制方法,所述的监控信息通过串联舵机的模型监控计算得到,具体计算过程包括以下步骤:
37.步骤1:计算串联舵机模型一个控制周期内的位移s,s=v
×
tj,其中v是串联舵机理论速度,tj是串联舵机控制周期;
38.步骤2:将串联舵机模型一个控制周期内的位移s转换为电压u,u=s
×
xk,其中xk是串联舵机电压/位移转换比例因子;
39.步骤3:计算串联舵机模型反馈因子pm,pm=u
÷
p,其中,p为串联舵机控制电路的开环增益;
40.步骤4:计算当前控制周期的串联舵机输入指令位置xin与前一控制周期的串联舵机模型位置y(n-1)的差值δ,δ=xin-y(n-1);
41.步骤5:计算串联舵机模型增益p0;
42.如果δ≥0,p0=p,如果δ<0,p0=-p;
43.步骤6:计算当前控制周期串联舵机模型位置y(n),y(n)=y(n-1)+p0×
pm;
44.步骤7:反馈监控信息,具体为:计算当前控制周期串联舵机模型位置y(n)与当前控制周期的位置反馈pos的差值,并将差值与模型监控位置阈值δm比较,如果差值的绝对值大于δm,计数变量e加1,如果差值的绝对值小于等于δm,计数变量e减1,计数变量e的最小值为0,当计数变量e大于计数阈值n,串联舵机向飞控计算机报模型监控故障,当计数变量e小于等于计数阈值n,串联舵机向飞控计算机报模型监控正常。
45.实施例4
46.步骤1:计算串联舵机模型一个控制周期内的位移s,s=v
×
tj,其中v是串联舵机理论速度,tj是串联舵机控制周期,当tj=0.005,v=20,s=0.1;
47.步骤2:将串联舵机模型一个控制周期内的位移s转换为电压u,u=s
×
xk,其中xk是串联舵机电压/位移转换比例因子,当xk=0.1,u=0.01;
48.步骤3:计算串联舵机模型反馈因子pm,pm=u
÷
p,其中,p为串联舵机控制电路的开环增益,当p=1,pm=0.01;
49.步骤4:计算串联舵机模型增益p0,δ=xin-y(n-1),如果δ≥0,p0=p,如果δ<0,p0=-p,其中xin为当前控制周期的串联舵机输入指令,y(n-1)为前一控制周期的串联舵机模型位置,当xin=5,y(n-1)=4.1,δ=0.9,p0=2;
50.步骤5:计算当前控制周期串联舵机模型位置y(n),y(n)=y(n-1)+p0×
pm,y(n)=4.12;
51.步骤6:反馈监控信息,具体为:计算当前控制周期串联舵机模型位置y(n)与当前控制周期的位置反馈pos的差值,并将差值与模型监控位置阈值δm比较,如果差值的绝对值大于δm,计数变量e加1,如果差值的绝对值小于等于δm,计数变量e减1,计数变量e的最小值为0,当计数变量e大于计数阈值n,串联舵机向飞控计算机报模型监控故障,当计数变量e小于等于计数阈值n,串联舵机向飞控计算机报模型监控正常,e=6,n=5,e>n。
52.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1