作业车辆用的自动行驶系统的制作方法
1.本发明涉及能够进行拖拉机、联合收割机等作业车辆的自动行驶的作业车辆用的自动行驶系统。
背景技术:
2.作为如上述那样的作业车辆用的自动行驶系统,具有:控制部,其使作业车辆按照对应于作业区域而生成的作业路径自动行驶;位置检测部,其检测作业车辆的位置;以及方位角检测部,其检测作业车辆的方位角。而且,控制部构成为:在作业车辆位于设定在作业区域的周围的田头上的行驶开始位置时被指示了作业开始的情况下,一边以使作业路径的延长线与作业车辆的位置的偏差变小方式控制作业车辆的行驶,一边使作业车辆从田头上的行驶开始位置自动行驶至作业路径的作业开始位置(例如参照专利文献1)。
3.专利文献1:日本特开2017-162373号公报
4.在专利文献1记载的技术中,在作业车辆从田头上的行驶开始位置朝向作业路径的作业开始位置进行自动行驶期间,控制部以使作业路径的延长线与作业车辆的位置的偏差变小的方式控制作业车辆的行驶。因此,从田头上的行驶开始位置至作业路径的作业开始位置的距离越长,越能够缩小作业路径的延长线与作业车辆的位置的偏差。由此,能够在作业区域中使作业车辆按照作业路径精度良好地自动行驶,从而能够提高作业车辆的作业精度。
5.另一方面,为了延长从田头上的行驶开始位置至作业路径的作业开始位置的距离,田头加宽而作业区域变窄,因此例如在作业区域是旱田作物区域的情况下,种植面积变窄而作物的收获量减少。或者,在作业区域是使作业车辆往复行驶的往复作业区域、田头是使作业车辆环绕行驶的环绕作业区域的情况下,作业车辆在田头的环绕圈数增多,从而作业效率降低。特别是在通过手动驾驶进行作业车辆的环绕行驶的情况下,对用户的负担增大。
6.若为了避免这种收获量减少、作业效率降低等情况而使田头变窄,则田头越窄,从田头上的行驶开始位置至作业路径的作业开始位置的距离越短,在作业车辆到达作业路径的作业开始位置的时刻,作业路径的延长线与作业车辆的位置的偏差越大。若在这种状态下,控制部将作业车辆切换为作业状态,使其按照作业路径自动行驶,则该偏差越大,作业车辆越以相对于作业路径左右摇晃较大的不稳定状态开始自动行驶,至该摇晃收敛为止所需的行驶距离也越长。因此,作业车辆通过之后的作业轨迹也是成为越接近作业开始位置而相对于作业路径的左右的摆动幅度越大,该不整齐的状态持续很长时间。
技术实现要素:
7.鉴于该实际情况,本发明的主要课题在于,提高作业车辆在自动行驶中的作业精度,而不会招致收获量减少、作业效率降低等情况。
8.本发明的第一特征结构的特征点在于,在作业车辆用的自动行驶系统中,具有:
9.进入区域设定部,其对隔开规定间隔排列的多条并列路径设定作业车辆的进入区域;
10.测位部,其测定上述作业车辆的位置以及方位;
11.自动行驶控制部,其基于上述并列路径和来自上述测位部的测位信息,执行使上述作业车辆以作业状态按照上述并列路径进行自动行驶的第一自动行驶控制;
12.偏差检测部,其基于上述并列路径和来自上述测位部的测位信息,检测在上述作业车辆到达上述进入区域的时刻上述作业车辆相对于上述并列路径的角度偏差和横向偏差;以及
13.条件判定部,在上述作业车辆到达上述进入区域的情况下,该条件判定部基于来自上述偏差检测部的检测信息,判定上述第一自动行驶控制的开始条件是否成立,
14.上述条件判定部在上述角度偏差小于规定角度且上述横向偏差小于规定值的情况下,判定为上述第一自动行驶控制的开始条件成立,
15.在上述作业车辆到达上述进入区域的时刻,当通过上述条件判定部判定为上述第一自动行驶控制的开始条件成立的情况下,上述自动行驶控制部执行上述第一自动行驶控制,当通过上述条件判定部判定为上述第一自动行驶控制的开始条件未成立的情况下,上述自动行驶控制部执行通过上述作业车辆的前进后退切换操作和转向操作的复合操作而使上述作业车辆进行之字行驶的自动之字行驶控制,以使得上述第一自动行驶控制的开始条件成立。
16.根据本结构,能够提高作业车辆在自动行驶中的作业精度,而不会招致收获量减少、作业效率降低等情况。
附图说明
17.图1是表示作业车辆用的自动行驶系统的简要结构的图。
18.图2是表示作业车辆用的自动行驶系统的简要结构的框图。
19.图3是表示拖拉机的传动结构的简图。
20.图4是表示自动行驶用的目标路径的一例的俯视图。
21.图5是表示障碍物检测单元的简要结构的框图。
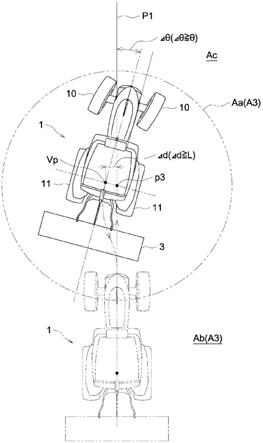
22.图6是表示拖拉机在第一自动行驶控制的开始条件成立的状态下位于并列路径的进入区域的状态的说明图。
23.图7是表示在选择有进入区域和行驶方向上游侧区域的可行驶区域中拖拉机进行之字行驶的状态的说明图。
24.图8是表示在选择有进入区域和行驶方向下游侧区域的可行驶区域中拖拉机进行之字行驶时的前进状态的说明图。
25.图9是表示在选择有进入区域和行驶方向下游侧区域的可行驶区域中拖拉机进行之字行驶时的后退状态的说明图。
26.图10是行驶控制切换处理的流程图。
具体实施方式
27.以下,作为用于实施本发明的实施方式的一例,基于附图说明将本发明的作业车
辆用的自动行驶系统应用于作为作业车辆的一例的拖拉机的实施方式。此外,除拖拉机以外,例如,本发明的作业车辆用的自动行驶系统还能应用于乘用割草机、乘用插秧机、联合收割机、搬运车、除雪车、轮式装载机等乘用作业车辆、以及无人割草机等无人作业车辆。
28.如图1所示,在本实施方式中例示的拖拉机1的后部,经由三点连杆机构2以能够升降且能够翻滚的方式连结有作为作业装置的一例的旋耕装置3。由此,该拖拉机1作为旋耕方式的作业车辆发挥功能。拖拉机1通过使用作业车辆用的自动行驶系统,能够在作为作业地的一例的图4所示的田地a等中进行自动行驶。
29.此外,能够取代旋耕装置3,而在拖拉机1的后部连结犁、圆盘犁、中耕机、心土铲、播种装置、喷雾装置、偏置割草机、收获装置等后端安装式的作业装置。或者,能够在拖拉机1的前部连结前端装载机、前端割草机空调等前端安装式的作业装置。
30.如图1~2所示,自动行驶系统包含:搭载于拖拉机1的自动行驶单元4;以及以能够与自动行驶单元4进行无线通信的方式而进行了通信设定的、作为无线通信设备的一例的便携式通信终端5等。便携式通信终端5包含能够进行与自动行驶有关的各种信息显示、输入操作等的多点触控式的显示设备(例如液晶面板)50等。
31.此外,对于便携式通信终端5,能够采用平板型的个人计算机、智能手机等。或者,对于无线通信,能够采用wi-fi(注册商标)等无线局域网(lan:local area network)、蓝牙(bluetooth:注册商标)等近距离无线通信等。
32.如图1、图3所示,拖拉机1具备能够驱动且能够转向操纵的左右的前轮10、能够驱动的左右的后轮11、形成搭乘式的驾驶部12的驾驶室13、具有共轨系统的电子控制式的柴油发动机(以下称为发动机)14、覆盖发动机14等的发动机罩15、以及对来自发动机14的动力进行变速的变速单元16等。由此,该拖拉机1构成为能够四轮驱动的前轮转向方式。此外,对于发动机14,也可以采用具有电子调速器的电子控制式的汽油发动机等。
33.如图2所示,拖拉机1具备对左右的前轮10进行转向操纵的全液压式的动力转向单元17、对左右的后轮11进行制动的制动单元18、对朝向旋耕装置3等驱动式的作业装置的传动进行断续的电子液压控制式的作业离合器单元19、对旋耕装置3进行升降驱动的电子液压控制式的升降驱动单元20、在滚动方向上驱动旋耕装置3的电子液压控制式的翻滚单元21、检测拖拉机1中的各种设定状态及各部分的动作状态等的包含各种传感器、开关等在内的车辆状态检测设备22、以及具有各种控制部的车载控制单元23等。此外,对于动力转向单元17,也可以采用具有转向操纵用的电动马达的电动式转向单元。
34.如图1~2所示,驾驶部12具备手动转向操纵用的方向盘25、乘客用的座席26、以及能够进行各种信息显示、输入操作等的操作终端27。图示省略,驾驶部12具备加速控制杆、主变速控制杆等操作控制杆类、以及加速踏板、离合器踏板等操作踏板类等。对于操作终端27,能够采用多点触控式的液晶监视器、与isobus(iso总线)对应的虚拟终端等。
35.如图3所示,变速单元16具备对来自发动机14的动力进行变速而用于行驶的行驶传动系统16a和进行变速而用于作业的作业传动系统16b。而且,通过行驶传动系统16a变速后的动力经由前轮驱动用的传动轴28以及在前车轴壳体29内置的前轮用差动装置30等而被传递至左右的前轮10。或者,通过作业传动系统16b变速后的动力被传递至旋耕装置3。变速单元16具备对左右的后轮11分别独立地进行制动的左右的制动器31。
36.行驶传动系统16a包含对来自发动机14的动力进行变速的电子控制式的主变速装
置32、将来自主变速装置32的动力切换为前进用和后退用的电子液压控制式的前进后退切换装置33、将来自前进后退切换装置33的前进用或后退用的动力变速为高低两挡的齿轮式的副变速装置34、将来自前进后退切换装置33的前进用或者后退用的动力变速为超低速挡的齿轮式的爬行挡装置35、将来自副变速装置34或者爬行挡装置35的动力分配至左右的后轮11的后轮用差动装置36、将来自后轮用差动装置36的动力减速并传递至左右的后轮11的左右的减速装置37、以及对从副变速装置34或者爬行挡装置35向左右的前轮10的传动进行切换的电子液压控制式的传动切换装置38等。
37.作业传动系统16b包含对来自发动机14的动力进行断续的液压式的作业离合器39、将经由作业离合器39的动力切换为正转三级和反转一级的作业用变速装置40、以及将来自作业用变速装置40的动力作为作业用而输出的pto轴41等。从pto轴41获取的动力在旋耕装置3等驱动式的作业装置与拖拉机1的后部连结的情况下,经由外部传动轴(未图示)等传递至作业装置。
38.对于主变速装置32,采用了传动效率比静液压式无级变速装置(hst:hydro static transmission)高的作为液压机械式无级变速装置的一例的i-hmt(integrated hydro-static mechanical transmission)。
39.此外,对于主变速装置32,也可以取代i-hmt而采用作为液压机械式无级变速装置的一例的hmt(hydraulic mechanical transmission)、静液压式无级变速装置、或者带式无级变速装置等无级变速装置。或者,也可以取代无级变速装置而采用具有多个液压式的变速离合器以及控制油相对于上述离合器的流动的多个电磁式的变速阀等的电子液压控制式的有级变速装置。
40.传动切换装置38将朝向左右的前轮10的传动状态切换为切断朝向左右的前轮10的传动的传动切断状态、以使左右的前轮10的圆周速度与左右的后轮11的圆周速度成为相同的方式传动至左右的前轮10的等速传动状态、和以使左右的前轮10的圆周速度成为左右的后轮11的圆周速度的约两倍的方式传动至左右的前轮10的倍速传动状态。由此,该拖拉机1构成为能够切换为两轮驱动状态、四轮驱动状态和前轮倍速状态。
41.图示省略,制动单元18包含左右的制动器31、与驾驶部12具备的左右的制动踏板的踏入操作连动地使左右的制动器31工作的脚刹系统、与驾驶部12具备的驻车控制杆的操作连动地使左右的制动器31工作的驻车制动系统、以及与左右的前轮10的设定角度以上的转向操纵连动地使转弯内侧的制动器31工作的转弯制动系统等。
42.车辆状态检测设备22是拖拉机1的各部分具备的各种传感器、开关等的统称。图示省略,车辆状态检测设备22包含检测加速控制杆的操作位置的加速传感器、检测主变速控制杆的操作位置的变速传感器、检测前进后退切换用的换向控制杆的操作位置的换向传感器、检测发动机14的输出转速的旋转传感器、检测拖拉机1的车速的车速传感器、以及检测前轮10的转向操纵角的转向角传感器等。
43.如图2所示,车载控制单元23包含:进行与发动机14有关的控制的发动机控制部23a;进行拖拉机1的车速、前进后退的切换等的与变速单元16有关的控制的变速单元控制部23b;进行与转向有关的控制的转向控制部23c;进行与旋耕装置3等作业装置有关的控制的作业装置控制部23d;进行与对操作终端27等的显示、报告有关的控制的显示控制部23e;进行与自动行驶有关的控制的自动行驶控制部23f;以及存储对应于在田地内被区分出的
行驶区域而生成的自动行驶用的目标路径p(参照图4)等的非易失性的车载存储部23g等。各控制部23a~23f通过集成有微型控制器等的电子控制单元、各种控制程序等来构建。各控制部23a~23f经由控制器局域网(can:controller area network)连接为能够相互通信。
44.此外,对于各控制部23a~23f的相互通信,也可以采用除can以外的通信标准、下一代通信标准,例如车载以太网(ethernet)、can-fd(can with flexible data rate:具有灵活数据速率的can)等。
45.发动机控制部23a基于来自加速传感器的检测信息和来自旋转传感器的检测信息,执行将发动机转速维持为与加速控制杆的操作位置对应的转速的发动机转速维持控制等。
46.变速单元控制部23b基于来自变速传感器的检测信息和来自车速传感器的检测信息等,执行控制主变速装置32的工作的车速控制,以使拖拉机1的车速变更为与主变速控制杆的操作位置对应的速度;并且变速单元控制部23b基于来自换向传感器的检测信息,执行切换前进后退切换装置的传动状态的前进后退切换控制等。车速控制包含在变速控制杆被操作至零速位置的情况下将主变速装置32减速控制至零速状态而使拖拉机1的行驶停止的减速停止处理。
47.在作业装置控制部23d中,执行基于驾驶部12具备的pto开关的操作等来控制作业离合器单元19的工作的作业离合器控制、基于驾驶部12具备的升降开关的操作、高度设定拨盘的设定值等来控制升降驱动单元20的工作的升降控制、以及基于驾驶部12具备的侧摆角设定拨盘的设定值等来控制翻滚单元21的工作的翻滚控制等。车辆状态检测设备22包含pto开关、升降开关、高度设定拨盘、以及侧摆角设定拨盘。
48.如图2所示,拖拉机1具备测定拖拉机1的位置、方位等的测位单元(测位部的一例)42。测位单元42包含利用作为卫星测位系统的一例的全球导航卫星系统(gnss:global navigation satellite system)测定拖拉机1的位置和方位的卫星导航装置43、以及具有三轴的陀螺仪以及三个方向的加速度传感器等来测定拖拉机1的姿势、方位等的惯性测量装置(imu:inertial measurement unit)44等。在利用gnss的测位方法中,存在dgnss(differential gnss:相对测位方式)、rtk-gnss(real time kinematic gnss:干扰测位方式)等。在本实施方式中,采用了适于移动体的测位的rtk-gnss。因此,如图1所示,在田地周边的已知位置设置有能够进行利用rtk-gnss的测位的基站6。
49.如图1~2所示,拖拉机1和基站6分别具备接收从测位卫星7(参照图1)发送出的电波的gnss天线45、60以及能够进行拖拉机1与基站6之间的包含测位信息在内的各信息的无线通信的通信模块46、61等。由此,测位单元42的卫星导航装置43能够基于拖拉机侧的gnss天线45接收来自测位卫星7的电波而获得的测位信息、和基站侧的gnss天线60接收来自测位卫星7的电波而获得的测位信息,来高精度地测定拖拉机1的位置以及方位。或者,测位单元42通过具有卫星导航装置43和惯性测量装置44,能够高精度地测定拖拉机1的位置、方位、姿势角(横摆角、侧摆角、纵摆角)。
50.在该拖拉机1中,图1所示的天线单元47包含测位单元42的惯性测量装置44、gnss天线45以及通信模块46。天线单元47配置于驾驶室13的前表面侧的上部的左右中央部位。
51.如图6~9所示,确定拖拉机1的位置时的车体位置vp设定于后轮车轴中心位置。车
体位置vp能够根据来自测位单元42的测位信息、以及拖拉机1中的包含gnss天线45的安装位置和后轮车轴中心位置的位置关系在内的车体信息而求出。
52.如图2所示,便携式通信终端5具备具有集成了微型控制器等的电子控制单元、各种控制程序等的终端控制单元51等。终端控制单元51包含显示控制部51a、目标路径生成部51b以及非易失性的终端存储部51c等,显示控制部51a进行与对显示设备50等的显示、报告有关的控制,目标路径生成部51b生成自动行驶用的目标路径p,非易失性的终端存储部51c存储目标路径生成部51b生成的目标路径p等。作为用于生成目标路径p的各种信息,在终端存储部51c存储有拖拉机1的转弯半径、旋耕装置3的作业宽度等车体信息、以及从上述测位信息得到的田地信息等。田地信息包含在确定田地a的形状、大小等的基础上在使拖拉机1沿田地a的外周边行驶时利用gnss获取到的在田地a中成为多个形状确定地点(形状确定坐标)的四个角部地点pa~pd(参照图4)、以及将这些角部地点pa~pd相连来确定田地a的形状、大小等的矩形的形状确定线sl(参照图4)等。
53.如图2所示,拖拉机1以及便携式通信终端5具备能够进行车载控制单元23与终端控制单元51之间的包含测位信息等在内的各信息的无线通信的通信模块48、52。在采用wi-fi进行与便携式通信终端5的无线通信的情况下,拖拉机1的通信模块48作为向can和wi-fi双向地变换通信信息的变换器而发挥功能。终端控制单元51能够通过与车载控制单元23的无线通信来获取包含拖拉机1的位置、方位等在内的与拖拉机1有关的各种信息。由此,能够通过便携式通信终端5的显示设备50显示包含拖拉机1相对于目标路径p的位置、方位等在内的各种信息。
54.目标路径生成部51b基于车体信息所包含的拖拉机1的转弯半径、旋耕装置3的作业宽度、以及田地信息所包含的田地a的形状、大小等来生成目标路径p。
55.例如,如图4所示,在矩形的田地a中,设定有自动行驶的开始位置p1和结束位置p2,在拖拉机1的作业行驶方向被设定为沿着田地a的短边的方向的情况下,首先,目标路径生成部51b基于上述四个角部地点pa~pd和矩形的形状确定线sl,将田地a区分为与田地a的外周边邻接的空白区域a1和位于空白区域a1的内侧的行驶区域a2。
56.接下来,目标路径生成部51b基于拖拉机1的转弯半径、旋耕装置3的作业宽度等,将行驶区域a2区分为在行驶区域a2中设定于各长边侧的田埂边缘的一对田头区域a2a和设定于一对田头区域a2a之间的中央侧区域a2b。之后,目标路径生成部51b在中央侧区域a2b生成在沿着田地a的长边的方向隔开与作业宽度对应的规定间隔而并列配置的多条并列路径p1。或者,目标路径生成部51b在各田头区域a2a生成按照拖拉机1的行驶顺序连接多条并列路径p1的多条连接路径p2。
57.由此,目标路径生成部51b可生成能够使拖拉机1从在图4所示的田地a设定的自动行驶的开始位置p1至结束位置p2而自动行驶的目标路径p。
58.在图4所示的田地a中,空白区域a1是为了防止当拖拉机1在行驶区域a2的田埂边缘进行自动行驶时旋耕装置3等与邻接于田地a的田埂等其他物体接触而在田地a的外周边与行驶区域a2之间确保的区域。各田头区域a2a是拖拉机1从当前行驶中的并列路径p1朝向接下来的并列路径p1按照连接路径p2进行转弯移动时的转弯区域。中央侧区域a2b是拖拉机1按照各并列路径p1以作业状态进行自动行驶的作业区域。
59.在图4所示的目标路径p中,各并列路径p1是拖拉机1边进行基于旋耕装置3的耕耘
作业边进行自动行驶的作业路径。各连接路径p2是拖拉机1不进行基于旋耕装置3的耕耘作业而进行自动行驶的非作业路径。各并列路径p1的始端位置p3是拖拉机1开始进行基于旋耕装置3的耕耘作业的作业开始位置。各并列路径p1的终端位置p4是拖拉机1停止进行基于旋耕装置3的耕耘作业的作业停止位置。各并列路径p1的始端位置p3中的拖拉机1的行驶顺位被设定为第一位的并列路径p1的始端位置p3是自动行驶的开始位置p1。而且,其余并列路径p1的始端位置p3是与连接路径p2的终端位置连接的连接位置。或者,拖拉机1的行驶顺位被设定为最后的并列路径p1的终端位置p4是自动行驶的结束位置p2。
60.此外,图4所示的目标路径p只是一例,目标路径生成部51b能够基于根据拖拉机1的机种、作业装置的种类等而不同的车体信息、以及根据田地a而不同的田地a的形状、大小等田地信息等,生成适于它们的各种目标路径p。
61.此外,在图4所示的目标路径p中,在拖拉机1进行基于耙地装置的耙地作业的情况下,各并列路径p1和各连接路径p2分别作为作业路径来使用。
62.目标路径p在与车体信息、田地信息等建立有关联的状态下存储于终端存储部51c,能够通过便携式通信终端5的显示设备50来显示。各并列路径p1的方位角、拖拉机1在各并列路径p1中的目标车速、拖拉机1在各连接路径p2b中的目标车速、在各并列路径p1中的前轮转向操纵角、以及在各连接路径p2b中的前轮转向操纵角等和上述作业开始位置p3以及作业停止位置p4一并包含于目标路径p中。
63.终端控制单元51对应于来自车载控制单元23的发送要求指令,将存储于终端存储部51c的田地信息、目标路径p等发送至车载控制单元23。车载控制单元23将接收到的田地信息、目标路径p等存储于车载存储部23g。关于目标路径p的发送,例如,终端控制单元51也可以在拖拉机1开始自动行驶之前的阶段中,将全部目标路径p从终端存储部51c一举发送至车载控制单元23。或者,终端控制单元51也可以将目标路径p分割为每隔规定距离的多个分割路径信息,自拖拉机1开始自动行驶之前的阶段,每当拖拉机1的行驶距离到达规定距离,则将与拖拉机1的行驶顺位对应的规定量的分割路径信息从终端存储部51c依次发送至车载控制单元23。
64.在车载控制单元23中,来自车辆状态检测设备22所包含的各种传感器、开关等的检测信息经由变速单元控制部23b、转向控制部23c等被输入至自动行驶控制部23f。由此,自动行驶控制部23f能够监视拖拉机1中的各种设定状态、各部分的动作状态等。
65.在拖拉机1通过由乘客、管理员等用户进行的手动驾驶而移动至自动行驶的开始位置p1之后,在进行用于满足各种自动行驶开始条件的手动操作从而拖拉机1的行驶模式被切换为自动行驶模式的状态下,便携式通信终端5的显示设备50被操作而指令了自动行驶的开始的情况下,自动行驶控制部23f开始自动行驶控制,从而边通过测位单元42获取拖拉机1的位置、方位等边根据目标路径p使拖拉机1自动行驶。
66.自动行驶控制部23f在执行自动行驶控制的过程中,例如在通过用户操作便携式通信终端5的显示设备50而指令了结束自动行驶的情况下、或在通过搭乘于驾驶部12的用户操作了方向盘25、加速踏板等手动操作工具的情况下,则结束自动行驶控制且将行驶模式从自动行驶模式切换为手动行驶模式。这样,在自动行驶控制结束之后使自动行驶控制再次开始的情况下,首先,用户坐进驾驶部12,将拖拉机1的行驶模式从自动行驶模式切换为手动行驶模式。接下来,在进行了用于满足各种自动行驶开始条件的手动操作之后,将拖
拉机1的行驶模式从手动行驶模式切换为自动行驶模式。而且,通过在该状态下操作便携式通信终端5的显示设备50来指令开始自动行驶,则能够使自动行驶控制再次开始。
67.由自动行驶控制部23f进行的自动行驶控制包含:将与发动机14有关的自动行驶用的控制指令发送至发动机控制部23a的发动机用自动控制处理;将与拖拉机1的车速、前进后退的切换有关的自动行驶用的控制指令发送至变速单元控制部23b的车速用自动控制处理;将与转向有关的自动行驶用的控制指令发送至转向控制部23c的转向用自动控制处理;以及将与旋耕装置3等作业装置有关的自动行驶用的控制指令发送至作业装置控制部23d的作业用自动控制处理等。
68.自动行驶控制部23f在发动机用自动控制处理中,将基于目标路径p所包含的设定转速等而指示发动机转速的变更的发动机转速变更指令等发送至发动机控制部23a。发动机控制部23a对应于从自动行驶控制部23f发送出的与发动机14有关的各种控制指令,执行自动地变更发动机转速的发动机转速变更控制等。
69.自动行驶控制部23f在车速用自动控制处理中,将基于目标路径p所包含的目标车速而指示主变速装置32的变速操作的变速操作指令、以及基于目标路径p所包含的拖拉机1的行进方向等而指示前进后退切换装置33的前进后退切换操作的前进后退切换指令等发送至变速单元控制部23b。变速单元控制部23b对应于从自动行驶控制部23f发送出的与主变速装置32、前进后退切换装置33等有关的各种控制指令,执行自动地控制主变速装置32的工作的自动车速控制、以及自动地控制前进后退切换装置33的工作的自动前进后退切换控制等。自动车速控制例如包含在目标路径p所包含的目标车速是零速的情况下将主变速装置32减速控制至零速状态而使拖拉机1的行驶停止的自动减速停止处理等。
70.自动行驶控制部23f在转向用自动控制处理中,将基于目标路径p所包含的前轮转向操纵角等而指示左右的前轮10的转向操纵的转向操纵指令等发送至转向控制部23c。转向控制部23c对应于从自动行驶控制部23f发送出的转向操纵指令,执行控制动力转向单元17的工作来对左右的前轮10进行转向操纵的自动转向控制、以及在左右的前轮10被转向操纵至设定角度以上的情况下使制动单元18工作而使转弯内侧的制动器31工作的自动制动转弯控制等。
71.自动行驶控制部23f在作业用自动控制处理中,将基于目标路径p所包含的作业开始位置p3而指示旋耕装置3向作业状态的切换的作业开始指令、以及基于目标路径p所包含的作业停止位置p4而指示旋耕装置3向非作业状态的切换的作业停止指令等发送至作业装置控制部23d。作业装置控制部23d对应于从自动行驶控制部23f发送出的与旋耕装置3有关的各种控制指令,执行控制作业离合器单元19和升降驱动单元20的工作而使旋耕装置3下降至作业高度来进行驱动的自动作业开始控制、以及使旋耕装置3停止并上升至非作业高度的自动作业停止控制等。
72.即,上述自动行驶单元4包含动力转向单元17、制动单元18、作业离合器单元19、升降驱动单元20、翻滚单元21、车辆状态检测设备22、车载控制单元23、测位单元42、以及通信模块46、48等。而且,通过它们恰当地工作,能够精度良好地使拖拉机1按照目标路径p自动行驶,并且能够恰当地进行基于旋耕装置3的耕耘作业。
73.如图2、图5所示,拖拉机1具备监视拖拉机1的周围来检测在其周围存在的障碍物的障碍物检测单元80。障碍物检测单元80检测的障碍物包括在田地a中进行作业的工作人
员等人、其他作业车辆、以及田地a中现有的电线杆、树木等。
74.如图1、图5所示,障碍物检测单元80包含拍摄拖拉机1的周围的拍摄单元80a、测定至在拖拉机1的周围存在的测定对象物为止的距离的有源传感器单元80b、以及对来自拍摄单元80a的信息和来自有源传感器单元80b的测定信息统一进行处理的信息统一处理部80c。
75.拍摄单元80a包含驾驶室13前方的规定范围被设定为拍摄范围的前照相机81、驾驶室13后方的规定范围被设定为拍摄范围的后照相机82、驾驶室13右方的规定范围被设定为拍摄范围的右照相机83、驾驶室13左方的规定范围被设定为拍摄范围的左照相机84、以及处理来自各照相机81~84的图像的图像处理装置85。
76.有源传感器单元80b包含驾驶室13前方的规定范围被设定为测定范围的前激光雷达传感器86、驾驶室13后方的规定范围被设定为测定范围的后激光雷达传感器87、以及驾驶室13右方的规定范围和驾驶室13左方的规定范围被设定为测定范围的声纳88。各激光雷达传感器86、87包含使用作为测定光的一例的激光(例如脉冲状的近红外激光)在测定范围进行测定的测定部86a、87a、和基于来自测定部86a、87a的测定信息进行距离图像的生成等的激光雷达控制部86b、87b。声纳88包含右超声波传感器88a、左超声波传感器88b和单一的声纳控制部88c。
77.信息统一处理部80c、图像处理装置85、各激光雷达控制部86b、87b、以及声纳控制部88c通过集成有微型控制器等的电子控制单元、各种控制程序等来构建。信息统一处理部80c、图像处理装置85、各激光雷达控制部86b、87b、以及声纳控制部88c经由can与车载控制单元23连接为能够相互通信。
78.前照相机81以及后照相机82配置于拖拉机1的左右中心线上。前照相机81以从斜上侧俯视拖拉机1的前侧的前低后高姿势配置于驾驶室13的前端侧的上部的左右中央部位。由此,在前照相机81中,拖拉机1的将左右中心线作为对称轴的车体前侧的规定范围被设定为拍摄范围。后照相机82以从斜上侧俯视拖拉机1的后侧的前高后低姿势配置于驾驶室13的后端侧的上部的左右中央部位。由此,在后照相机82中,拖拉机1的将左右中心线作为对称轴的车体后侧的规定范围被设定为拍摄范围。右照相机83以从斜上侧俯视拖拉机1的右侧的左高右低姿势配置于驾驶室13的右端侧的上部的前后中央部位。由此,在右照相机83中,车体右侧的规定范围被设定为拍摄范围。左照相机84以从斜上侧俯视拖拉机1的左侧的左低右高姿势配置于驾驶室13的左端侧的上部的前后中央部位。由此,在左照相机84中,车体左侧的规定范围被设定为拍摄范围。
79.在各激光雷达传感器86、87中,各测定部86a、87a通过基于至照射出的激光到达测距点并返回为止的往复时间来测定至测距点为止的距离的飞行时间(tof:time of flight)方式,测定从各测定部86a、87a至测定范围的各测距点为止的距离。各测定部86a、87a通过遍及测定范围的整体,以高速纵横地扫描激光,依次测定每个扫描角(坐标)的至测距点为止的距离,从而在各测定范围中进行三维测定。各测定部86a、87a依次测定在遍及测定范围的整体以高速纵横地扫描了激光时而得到的来自各测距点的反射光的强度(以下称为反射强度)。各测定部86a、87a实时地反复测定至测定范围的各测距点为止的距离、各反射强度等。各激光雷达控制部86b、87b根据各测定部86a、87a测定出的至各测距点为止的距离、针对各测距点的扫描角(坐标)等测定信息,来生成距离图像,并且提取被推定为障碍物
的测距点组,并将与提取出的测距点组有关的测定信息作为与候补障碍物有关的测定信息发送至信息统一处理部80c。
80.前激光雷达传感器86以及后激光雷达传感器87与前照相机81以及后照相机82相同,配置于拖拉机1的左右中心线上。前激光雷达传感器86以从斜上侧俯视拖拉机1的前侧的前低后高姿势配置于驾驶室13的前端侧的上部的左右中央部位。由此,在前激光雷达传感器86中,拖拉机1的将左右中心线作为对称轴的车体前侧的规定范围被设定为通过测定部86a测定的测定范围。后激光雷达传感器87以从斜上侧俯视拖拉机1的后侧的前高后低姿势配置于驾驶室13的后端侧的上部的左右中央部位。由此,在后激光雷达传感器87中,拖拉机1的将左右中心线作为对称轴的车体后侧的规定范围被设定为通过测定部87a测定的测定范围。
81.在声纳88中,声纳控制部88c基于由左右的超声波传感器88a、88b进行的超声波的发送接收,判定在测定范围中是否存在测定对象物。声纳控制部88c通过基于至发送出的超声波到达测距点并返回为止的往复时间来测定至测距点为止的距离的飞行时间(tof:time of flight)方式,测定从各超声波传感器88a、88b至测定对象物为止的距离,将测定出的至测定对象物为止的距离和测定对象物的方向作为与候补障碍物有关的测定信息发送至信息统一处理部80c。
82.图示省略,右超声波传感器88a以朝向车体右外侧姿势安装于在右侧的前轮10与右侧的后轮11之间配置的右侧的上下车台阶。由此,在右超声波传感器88a中,车体右外侧的规定范围被设定为测定范围。如图1所示,左超声波传感器88b以朝向车体左外侧姿势安装于在左侧的前轮10与左侧的后轮11之间配置的左侧的上下车台阶24。由此,在左超声波传感器88b中,车体左外侧的规定范围被设定为测定范围。
83.图像处理装置85对从各照相机81~84依次发送的图像进行图像处理。图像处理装置85实施用于将在田地a中作业的工作人员等人、其他作业车辆、以及田地a中现有的电线杆、树木等识别为障碍物的学习处理。
84.图像处理装置85合成从各照相机81~84依次发送来的图像,从而生成拖拉机1的全方位图像(例如环景),并且将生成的全方位图像、来自各照相机81~84的图像发送至拖拉机1的显示控制部23e、便携式通信终端5的显示控制部51a。
85.由此,能够将图像处理装置85生成的全方位图像、拖拉机1的行驶方向的图像等在拖拉机1的操作终端27、便携式通信终端5的显示设备50等进行显示。而且,通过该显示,能够使用户视觉确认拖拉机1的周围的状况、行驶方向的状况。
86.图像处理装置85基于从各照相机81~84依次发送来的图像,判别在各照相机81~84中的任一个的拍摄范围中是否存在对拖拉机1的行驶造成影响的障碍物。当存在障碍物的情况下,图像处理装置85求出在障碍物存在的图像上的障碍物的坐标,并基于各照相机81~84的搭载位置、搭载角度等将求出的障碍物的坐标变换为以车体坐标原点为基准的坐标。而且,求出该变换后的坐标与预先设定的距离计算基准点之间的直线距离来作为从距离计算基准点至障碍物为止的距离,并将变换后的坐标和求出的至障碍物为止的距离作为与障碍物有关的信息而将其发送至信息统一处理部80c。另一方面,当不存在障碍物的情况下,将未检测到障碍物这一情况发送至信息统一处理部80c。
87.这样,在各照相机81~84的拍摄范围中的任一范围中存在障碍物的情况下,图像
处理装置85将与障碍物有关的信息发送至信息统一处理部80c,由此信息统一处理部80c通过接收与该障碍物有关的信息而能够把握在各照相机81~84的任一拍摄范围中存在障碍物这一情况,并且能够获取该障碍物的位置以及至障碍物为止的距离。或者,在各照相机81~84的拍摄范围中的任一范围中均不存在障碍物的情况下,图像处理装置85将未检测到障碍物这一情况发送至信息统一处理部80c,则信息统一处理部80c能够把握在各照相机81~84的拍摄范围中的任一范围中均不存在障碍物这一情况。
88.在将来自物体的判别精度高的拍摄单元80a的与障碍物有关的信息、和来自测距精度高的有源传感器单元80b的与候补障碍物有关的测定信息进行了整合的情况下,信息统一处理部80c采用从有源传感器单元80b得到的至候补障碍物为止的距离作为至障碍物为止的距离。由此,障碍物检测单元80能够获取信息统一处理部80c中的物体的判别精度以及测距精度高的与障碍物有关的信息。障碍物检测单元80将通过信息统一处理部80c获取到的与障碍物有关的信息发送至自动行驶控制部23f。
89.自动行驶控制部23f基于来自障碍物检测单元80的与障碍物有关的信息,执行避免与障碍物的碰撞的避免碰撞控制。自动行驶控制部23f构成为:在避免碰撞控制中,基于来自障碍物检测单元80的与障碍物有关的信息,获取至障碍物的距离等,对应于获取到的至障碍物的距离等,适当地进行使拖拉机1以及便携式通信终端5具备的报告蜂鸣器、报告灯等报告器工作的报告处理、使拖拉机1的车速自动地降低的自动减速处理、以及使拖拉机1的行驶自动地停止的自动行驶停止处理等各种避免碰撞处理。
90.自动行驶控制部23f在拖拉机1位于自动行驶的开始位置p1的状态下被指令了自动行驶的开始的情况下,开始使拖拉机1按照目标路径p自动行驶的自动行驶控制。自动行驶控制包含基于目标路径p的并列路径p1和来自测位单元42的测位信息而使拖拉机1以作业状态按照并列路径p1进行自动行驶的第一自动行驶控制、和基于目标路径p的连接路径p2和来自测位单元42的测位信息而使拖拉机1以非作业状态按照连接路径p2进行自动行驶的第二自动行驶控制。
91.如图2所示,自动行驶控制部23f包含:进入区域设定部23fa,其对各并列路径p1设定拖拉机1的进入区域aa(参照图4);偏差检测部23fb,其基于并列路径p1和来自测位单元42的测位信息,检测拖拉机1在到达进入区域aa的时刻相对于并列路径p1的横摆方向上拖拉机1的角度偏差δθ(参照图6~8)和横向偏差δd(参照图6~8);以及条件判定部23fc,其在拖拉机1到达进入区域aa的情况下,基于来自偏差检测部23fb的检测信息,判定第一自动行驶控制的开始条件是否成立。
92.如图4、图6~9所示,进入区域设定部23fa将各并列路径p1的包含始端位置p3的规定区域设定为针对各并列路径p1的进入区域aa。如图6所示,条件判定部23fc在上述角度偏差δθ小于规定角度θ(例如10度)且上述横向偏差δd小于规定值l(5cm)的情况下,判定为第一自动行驶控制的开始条件成立。如图7~8所示,条件判定部23fc在上述角度偏差δθ为规定角度θ以上的情况下、或在上述横向偏差δd为规定值l以上的情况下,判定为第一自动行驶控制的开始条件未成立。
93.在拖拉机1通过用户的手动驾驶或者基于第二自动行驶控制的自动行驶而到达进入区域aa的时刻,当通过条件判定部23fc判定为第一自动行驶控制的开始条件成立的情况下,自动行驶控制部23f执行第一自动行驶控制(参照图6)。或者,当通过条件判定部23fc判
定为第一自动行驶控制的开始条件未成立的情况下,自动行驶控制部23f执行通过拖拉机1的前进后退切换操作和转向操作的复合操作而使拖拉机1进行之字行驶的自动之字行驶控制,以使第一自动行驶控制的开始条件成立(参照图7~9)。
94.即,自动行驶控制部23f在拖拉机1通过用户的手动驾驶或者基于第二自动行驶控制的自动行驶而到达进入区域aa时,进行将基于条件判定部23fc的判定而执行的行驶控制切换为第一自动行驶控制和自动之字行驶控制的行驶控制切换处理。
95.而且,如图10的流程图所示,在该行驶控制切换处理中,首先,自动行驶控制部23f在拖拉机1到达上述进入区域aa时,进行通过条件判定部23fc判定第一自动行驶控制的开始条件是否成立的判定处理(步骤#1)。
96.而且,如图6所示,在拖拉机1到达上述进入区域aa时,在上述角度偏差δθ小于规定角度θ且上述横向偏差δd小于规定值l的情况下,在判定处理中,条件判定部23fc判定为第一自动行驶控制的开始条件成立,因此自动行驶控制部23f执行第一自动行驶控制,使拖拉机1以作业状态按照并列路径p1进行自动行驶(步骤#2)。由此,拖拉机1能够从开始基于第一自动行驶控制的自动行驶的阶段起,边进行相对于并列路径p1的摆动幅度小且精度高的自动行驶边进行作业。
97.另一方面,如图7~9所示,在拖拉机1到达上述进入区域aa时,在上述角度偏差δθ为规定角度θ以上的情况下、或在上述横向偏差δd为规定值l以上的情况下,在判定处理中,条件判定部23fc判定为第一自动行驶控制的开始条件未成立,因此自动行驶控制部23f不执行第一自动行驶控制,而执行自动之字行驶控制(步骤#3),并且进行上述判定处理(步骤#1)。
98.由此,能够防止因在上述角度偏差δθ为规定角度θ以上的情况下、或在上述横向偏差δd为规定值l以上的情况下执行第一自动行驶控制,而导致拖拉机1相对于并列路径p1的摆动幅度增大,致使该摆动收敛为止需要较长距离,从而产生在此期间的作业精度降低的不良状况。
99.或者,自动行驶控制部23f通过拖拉机1的之字行驶而使第一自动行驶控制的开始条件成立,因此不再需要为了易于使第一自动行驶控制的开始条件成立而在各并列路径p1中的始端位置p3侧的延长线上生成距离较长的移动路径。由此,能够防止因田地a中的移动路径越长,而拖拉机1以作业状态进行自动行驶的并列路径p1越短且田头区域a2a越宽,从而产生例如在田头区域a2a是使拖拉机1环绕行驶的环绕作业区域的情况下拖拉机1在环绕作业区域中的环绕圈数增多而导致作业效率降低等不良状况。
100.如图2、图7~8所示,自动行驶控制部23f包含行驶区域选择部23fd,该行驶区域选择部23fd从上述进入区域aa、以及在各并列路径p1中的在拖拉机1的行驶方向上隔着进入区域aa的规定的行驶方向上游侧区域ab和行驶方向下游侧区域ac中,选择拖拉机1在自动之字行驶控制中的可行驶区域a3。行驶区域选择部23fd基于在通过目标路径生成部51b生成目标路径p时由用户设定的田头区域a2a的宽度、作业装置3的种类等,来选择拖拉机1的可行驶区域a3。
101.具体而言,例如,在田头区域a2a中的从形状确定线sl至中央侧区域a2b的田头宽度w(参照图4)被较宽地设定为作业装置3的作业宽度以上从而进入区域aa的行驶方向上游侧区域ab变宽的情况下,即便在行驶方向上游侧区域ab中进行拖拉机1的之字行驶,也不担
忧与拖拉机1连结的作业装置3与邻接于田地a的田埂等其他物体接触,因此除进入区域aa之外,行驶区域选择部23fd也能将行驶方向上游侧区域ab选择为可行驶区域a3。
102.例如,在田头区域a2a的田头宽度w被较窄地设定为允许拖拉机1以最小转弯半径进行转弯行驶的程度从而进入区域aa的行驶方向上游侧区域ab变窄的情况下,若在行驶方向上游侧区域ab中进行拖拉机1的之字行驶,则担忧与拖拉机1连结的作业装置3与田埂等接触,因此行驶区域选择部23fd无法将行驶方向上游侧区域ab选择为可行驶区域a3。
103.例如,像作业装置3的种类为旋耕装置(参照图1)、犁(未图示)等那样,即便拖拉机1进入行驶方向下游侧区域ac而进行之字行驶,也难以对之后的行驶方向下游侧区域ac中的作业给予影响,在该情况下,除进入区域aa之外,行驶区域选择部23fd也能将行驶方向下游侧区域ac选择为可行驶区域a3。
104.例如,像作业装置3的种类为播种装置(未图示)、收获装置(未图示)等那样,若拖拉机1进入行驶方向下游侧区域ac而进行之字行驶,则容易对之后的行驶方向下游侧区域ac中的作业给予影响,在该情况下,行驶区域选择部23fd无法将行驶方向下游侧区域ac选择为可行驶区域a3。
105.在除进入区域aa之外行驶方向上游侧区域ab和行驶方向下游侧区域ac也能被选择为可行驶区域a3的情况下,以及在除进入区域aa之外行驶方向上游侧区域ab也能被选择为可行驶区域a3的情况下,行驶区域选择部23fd将进入区域aa和行驶方向上游侧区域ab选择为可行驶区域a3。由此,能够避免拖拉机1在之字行驶时进入行驶方向下游侧区域ac,且能够扩宽用于进行之字行驶的可行驶区域a3。其结果是,能够避免因拖拉机1进入行驶方向下游侧区域ac而可能给之后的基于作业装置3的作业带来妨碍,且能够易于使第一自动行驶控制的开始条件成立。
106.此外,在进入区域aa和行驶方向上游侧区域ab被选择为可行驶区域a3时的自动之字行驶控制中,如图7所示,在包含进入区域aa和行驶方向上游侧区域ab的可行驶区域a3中,自动行驶控制部23f通过一边使拖拉机1前进后退一边转向操纵左右的前轮10,使得上述角度偏差δθ小于规定角度θ,且使上述横向偏差δd小于规定值l。
107.在除进入区域aa之外行驶方向下游侧区域ac也能被选择为可行驶区域a3的情况下,行驶区域选择部23fd将进入区域aa和行驶方向下游侧区域ac选择为可行驶区域a3。由此,能够避免拖拉机1在之字行驶时进入行驶方向上游侧区域ab,且能够扩宽用于进行之字行驶的可行驶区域a3。其结果是,能够避免因拖拉机1进入行驶方向上游侧区域ab而可能发生与拖拉机1连结的作业装置3与田埂等其他物体接触,且能够易于使第一自动行驶控制的开始条件成立。
108.此外,自动行驶控制部23f在进入区域aa和行驶方向下游侧区域ac被选择为可行驶区域a3时的自动之字行驶控制中,如图8~9所示,在包含进入区域aa和行驶方向下游侧区域ac的可行驶区域a3中,自动行驶控制部23f通过一边使拖拉机1前进后退一边转向操纵左右的前轮10,使得上述角度偏差δθ小于规定角度θ,且使上述横向偏差δd小于规定值l。
109.行驶区域选择部23fd在仅进入区域aa能够被选择为可行驶区域a3的情况下,仅将进入区域aa选择为可行驶区域a3。由此,能够避免拖拉机1在之字行驶时进入行驶方向上游侧区域ab以及行驶方向下游侧区域ac,且能够确保用于进行之字行驶的可行驶区域a3。其结果是,能够避免因拖拉机1进入行驶方向上游侧区域ab而可能发生与拖拉机1连结的作业
装置3与田埂等其他物体接触、以及因拖拉机1进入行驶方向下游侧区域ac而可能给之后的由作业装置3进行的作业带来妨碍,且能够使第一自动行驶控制的开始条件成立。
110.在自动之字行驶控制中,设定为拖拉机1能够在可行驶区域a3中进行多次之字行驶。由此,例如,即便在通过行驶区域选择部23fd仅将进入区域aa选择为可行驶区域a3从而可行驶区域a3变窄的情况下,也能够通过拖拉机1在可行驶区域a3中的之字行驶,使第一自动行驶控制的开始条件可靠地成立。
111.在拖拉机1基于自动之字行驶控制而进行的之字行驶中,当通过条件判定部23fc判定为第一自动行驶控制的开始条件成立的情况下,自动行驶控制部23f从自动之字行驶控制转换为第一自动行驶控制。由此,在通过拖拉机1基于自动之字行驶控制而进行的之字行驶从而使第一自动行驶控制的开始条件成立的情况下,伴随该开始条件的成立,拖拉机1立即以相对于并列路径p1的摆动幅度小且精度高的状态,一边按照并列路径p1进行自动行驶一边进行作业。其结果是,能够实现作业效率的提高且能够实现作业精度的提高。
112.如图4所示,目标路径p能够以包含遍及从各并列路径p1偏离的拖拉机1的待机位置p0、与拖拉机1的行驶顺位被设定为第一位的并列路径p1的始端位置p3的移动路径rm(在图4中用虚线表示的路径)的方式生成。在图4中,待机位置p0设定于拖拉机1相对于田地a的出入口附近。待机位置p0的设定能够对应于田地的形状等来进行各种变更。
113.自动行驶控制部23f在目标路径p包含移动路径rm的情况下,在自动行驶控制中,能够基于移动路径rm和来自测位单元42的测位信息,执行使拖拉机1按照移动路径rm以非作业状态自动行驶的自动移动控制。
114.进入区域设定部23fa在自动移动控制中,将包含作为拖拉机1的行驶顺位被设定为第一位的并列路径p1与移动路径rm的连接位置的第一位的并列路径p1的始端位置p3的规定区域设定为进入区域aa。
115.由此,如果使拖拉机1在位于待机位置p0之后开始自动行驶,则自动行驶控制部23f执行自动移动控制,使拖拉机1以非作业状态按照移动路径rm从待机位置p0朝向进入区域aa自动行驶。之后,在该自动行驶中拖拉机1到达进入区域aa时,在第一自动行驶控制的开始条件成立的情况下,自动行驶控制部23f执行第一自动行驶控制,使拖拉机1以作业状态按照并列路径p1自动行驶。或者,在第一自动行驶控制的开始条件未成立的情况下,自动行驶控制部23f不执行第一自动行驶控制,而执行自动之字行驶控制,使拖拉机1进行之字行驶。之后,在通过该之字行驶从而使得第一自动行驶控制的开始条件成立的情况下,自动行驶控制部23f执行第一自动行驶控制,使拖拉机1以作业状态按照并列路径p1自动行驶。
116.即,在目标路径p包含移动路径rm的情况下,能够使拖拉机1遍及包含移动路径rm在内的目标路径p的全长而精度良好地自动行驶。由此,用户不再需要使拖拉机1手动行驶至拖拉机1的行驶顺位被设定为第一位的并列路径p1的始端位置p3,从而能够减轻对用户的负担。
117.〔其他实施方式〕
118.说明本发明的其他实施方式。此外,以下说明的各其他实施方式的结构不限定于分别单独地应用,也能与另外的其他实施方式的结构组合来应用。
119.(1)与作业车辆1的结构有关的代表性的其他实施方式如以下所述。例如,作业车辆1也可以构成为取代左右的后轮11而具备左右的履带的半履带方式。例如,作业车辆1也
可以构成为取代左右的前轮10以及左右的后轮11而具备左右的履带的全履带方式。例如,作业车辆1也可以构成为左右的后轮11作为转向操纵轮而发挥功能的后轮转向方式。例如,作业车辆1也可以构成为取代发动机14而具备电动马达的电动方式。例如,作业车辆1也可以构成为具备发动机14和电动马达的混动方式。
120.(2)作为作业车辆用的自动行驶系统,自动行驶控制部23f也可以构成为:执行上述第一自动行驶控制和自动之字行驶控制,并通过用户的手动驾驶来进行使作业车辆1从当前行驶中的并列路径p1向接下来的并列路径p1移动的转弯移动。
121.(3)进入区域设定部23fa例如也可以构成为:在作业车辆1是联合收割机等收获作业车辆,在执行第一自动行驶控制的过程中,通过仓满传感器检测到收获物仓满,而需要中断第一自动行驶控制的情况下,将此时的并列路径p1中的包含作业的中断位置(例如在图4中用附图标记p5表示的位置)的规定区域(例如在图4中用虚线表示的区域)设定为针对该并列路径p1的进入区域aa。
122.(4)进入区域设定部23fa例如也可以构成为:在作业车辆1是将种子、秧苗等农用资材供给至田地的播种机、插秧机等农用资材供给作业车辆,在执行第一自动行驶控制的过程中,通过余量传感器检测到农用资材的余量到达下限值而需要中断第一自动行驶控制的情况下,将此时的并列路径p1中的包含作业的中断位置的规定区域设定为针对该并列路径p1的进入区域aa。
123.[发明的附记]
[0124]
本发明的第一特征结构的特征点在于,在作业车辆用的自动行驶系统中,具有:
[0125]
进入区域设定部,其对隔开规定间隔排列的多条并列路径设定作业车辆的进入区域;
[0126]
测位部,其测定上述作业车辆的位置以及方位;
[0127]
自动行驶控制部,其基于上述并列路径和来自上述测位部的测位信息,执行使上述作业车辆以作业状态按照上述并列路径进行自动行驶的第一自动行驶控制;
[0128]
偏差检测部,其基于上述并列路径和来自上述测位部的测位信息,检测上述作业车辆在到达上述进入区域的时刻相对于上述并列路径的角度偏差和横向偏差;以及
[0129]
条件判定部,在上述作业车辆到达上述进入区域的情况下,该条件判定部基于来自上述偏差检测部的检测信息,判定上述第一自动行驶控制的开始条件是否成立,
[0130]
在上述角度偏差小于规定角度且上述横向偏差小于规定值的情况下,上述条件判定部判定为上述第一自动行驶控制的开始条件成立,
[0131]
在上述作业车辆到达上述进入区域的时刻,当通过上述条件判定部判定为上述第一自动行驶控制的开始条件成立的情况下,上述自动行驶控制部执行上述第一自动行驶控制,当通过上述条件判定部判定为上述第一自动行驶控制的开始条件未成立的情况下,上述自动行驶控制部执行通过上述作业车辆的前进后退切换操作和转向操作的复合操作而使上述作业车辆进行之字行驶的自动之字行驶控制,以使得上述第一自动行驶控制的开始条件成立。
[0132]
根据本结构,在作业车辆到达上述进入区域时,当上述角度偏差小于规定角度且上述横向偏差小于规定值的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆以作业状态按照并列路径进行自动行驶。由此,作业车辆能够从开始自动行驶的阶段起边
进行相对于并列路径的摆动幅度小且精度高的自动行驶边进行作业。
[0133]
另一方面,在作业车辆到达上述进入区域时,在上述角度偏差为规定角度以上的情况下、或在上述横向偏差为规定值以上的情况下,自动行驶控制部不执行第一自动行驶控制,而执行自动之字行驶控制。由此,能够防止因在上述角度偏差为规定角度以上的情况下、或在上述横向偏差为规定值以上的情况下执行第一自动行驶控制,而导致作业车辆开始相对于并列路径的摆动幅度大且精度低的自动行驶,至该摆动收敛为止需要较长距离,从而产生在此期间的作业精度降低的不良状况。
[0134]
并且,由于自动行驶控制部通过作业车辆的之字行驶,在前进时和后退时这双方中,减小上述角度偏差和横向偏差,使得第一自动行驶控制的开始条件成立,因而易于使第一自动行驶控制的开始条件成立,因此无需在并列路径的延长线上生成距离较长的移动路径。特别是,在大多构成为前轮转向方式的农用的作业车辆中,因为与前进时相比后退时容易进行作业车辆相对于并列路径的对位操作,所以在缩短上述移动路径上优选。
[0135]
由此,能够防止如下情况,即:对应于延长作业地中的移动路径,使作业车辆以作业状态自动行驶的并列路径缩短,由于这样的原因,例如,在并列路径的生成区域(作业区域)是旱田作物区域的情况下,发生种植面积变窄从而作物的收获量减少的不良状况,或者在并列路径的生成区域是使作业车辆往复行驶的往复作业区域、移动路径的生成区域是使作业车辆环绕行驶的环绕作业区域的情况下,发生作业车辆在环绕作业区域中的环绕圈数增多从而作业效率降低的不良状况等情况。
[0136]
其结果是,能够使作业车辆以作业状态按照并列路径精度良好地自动行驶而不会招致收获量减少、作业效率降低等情况,能够提高作业车辆在自动行驶中的作业精度。
[0137]
本发明的第二特征结构的特征点在于,具有行驶区域选择部,上述行驶区域选择部从上述进入区域、以及上述并列路径中的在上述作业车辆的行驶方向上隔着上述进入区域的行驶方向上游侧区域和行驶方向下游侧区域中,选择上述作业车辆在上述自动之字行驶控制中的可行驶区域。
[0138]
根据本结构,例如,在进入区域是包含并列路径的始端位置的规定区域的情况下,行驶方向上游侧区域包含于比并列路径的始端位置靠行驶方向上游侧的田头区域中,行驶方向下游侧区域包含于配置有并列路径的作业区域中。
[0139]
在该情况下,如果作业车辆的作业内容是即便作业车辆进入行驶方向下游侧区域进行之字行驶也难以对之后的行驶方向下游侧区域中的作业给予影响的耕耘作业等,则除进入区域之外,至少也能将行驶方向下游侧区域选择为可行驶区域。由此,能够使可行驶区域变宽,容易进行作业车辆在可行驶区域中的之字行驶,能够在可行驶区域中易于使第一自动行驶控制的开始条件成立。
[0140]
相反,如果作业车辆的作业内容是当作业车辆进入行驶方向下游侧区域进行之字行驶则容易对之后的行驶方向下游侧区域中的作业给予影响的播种作业、秧苗移植作业等,则能够将进入区域和行驶方向上游侧区域选择为可行驶区域,将行驶方向下游侧区域从可行驶区域中排除。由此,能够避免因在行驶方向下游侧区域中作业车辆进行之字行驶而导致作业精度降低,并能够使可行驶区域变宽而容易进行作业车辆在可行驶区域中的之字行驶,从而能够在可行驶区域中易于使第一自动行驶控制的开始条件成立。
[0141]
另一方面,例如,在进入区域是并列路径中的包含第一自动行驶控制的中断位置
的规定区域的情况下,行驶方向上游侧区域包含于比中断位置靠行驶方向上游侧的已作业区域中,行驶方向下游侧区域包含于比中断位置靠行驶方向下游侧的未作业区域中。
[0142]
在该情况下,如果作业车辆的作业内容是收获作业,则能够将进入区域和行驶方向上游侧区域选择为可行驶区域,将行驶方向下游侧区域从可行驶区域中排除。由此,能够避免因在行驶方向下游侧区域中作业车辆进行之字行驶而发生未收获物被踩踏的不良状况,且能够使可行驶区域变宽而容易进行作业车辆在可行驶区域中的之字行驶,从而能够在可行驶区域中易于使第一自动行驶控制的开始条件成立。
[0143]
并且,如果作业车辆的作业内容是耕耘作业等,能够将进入区域和行驶方向下游侧区域选择为可行驶区域,将行驶方向上游侧区域从可行驶区域中排除。由此,能够避免因在行驶方向上游侧区域中作业车辆进行之字行驶而产生已作业地被踩踏的不良状况,且能够使可行驶区域变宽而容易进行作业车辆在可行驶区域中的之字行驶,从而能够在可行驶区域中易于使第一自动行驶控制的开始条件成立。
[0144]
即,能够设定适于作业车辆的作业内容等的可行驶区域,由此能够容易进行作业车辆在可行驶区域中的之字行驶,而不会给由作业车辆进行的作业带来妨碍,能够易于使第一自动行驶控制的开始条件成立。
[0145]
本发明的第三特征结构的特征点在于,在上述自动之字行驶控制中,设定为上述作业车辆能够在上述可行驶区域中进行多次之字行驶。
[0146]
根据本结构,即便在仅进入区域被选择为可行驶区域而可行驶区域变窄的情况下,也能通过作业车辆在可行驶区域中的之字行驶来使第一自动行驶控制的开始条件可靠地成立。
[0147]
本发明的第四特征结构的特征点在于,在上述作业车辆通过上述自动之字行驶控制而进行的之字行驶中,通过上述条件判定部判定为上述第一自动行驶控制的开始条件成立的情况下,上述自动行驶控制部从上述自动之字行驶控制转换为上述第一自动行驶控制。
[0148]
根据本结构,在通过作业车辆基于自动之字行驶控制而进行的之字行驶从而使第一自动行驶控制的开始条件成立的情况下,伴随该开始条件的成立,作业车辆立即以相对于并列路径的摆动幅度小且精度高的状态,一边按照并列路径进行自动行驶一边进行作业。其结果是,能够实现作业效率的提高且能够实现作业精度的提高。
[0149]
本发明的第五特征结构的特征点在于,上述自动行驶控制部执行自动移动控制,使上述作业车辆以非作业状态按照遍及从上述并列路径偏离的上述作业车辆的待机位置、与多条上述并列路径之中的上述作业车辆的行驶顺位被设定为第一位的并列路径的始端位置的移动路径来自动行驶,上述进入区域设定部在上述自动移动控制中,将包含上述始端位置的规定区域设定为针对上述第一位的并列路径的上述进入区域。
[0150]
根据本结构,如果使作业车辆在位于待机位置之后开始自动行驶,则自动行驶控制部执行自动移动控制,使作业车辆按照移动路径从待机位置朝向进入区域以非作业状态自动行驶。之后,在该自动行驶中当作业车辆到达进入区域的时刻,在第一自动行驶控制的开始条件成立的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆以作业状态按照并列路径自动行驶。或者,在第一自动行驶控制的开始条件未成立的情况下,自动行驶控制部不执行第一自动行驶控制,而执行自动之字行驶控制,使作业车辆进行之字行驶。之
后,在第一自动行驶控制的开始条件通过该之字行驶而成立的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆以作业状态按照并列路径自动行驶。
[0151]
即,除并列路径之外,在从待机位置至并列路径的始端位置的移动路径中,也能使作业车辆精度良好地自动行驶。由此,用户不再需要使作业车辆从待机位置手动行驶至并列路径的始端位置,由此能够减轻对用户的负担。
[0152]
本发明的第六特征结构的特征点在于,上述自动行驶控制部执行第二自动行驶控制,使上述作业车辆按照以上述作业车辆的行驶顺序连接多条上述并列路径而成的连接路径来自动行驶,
[0153]
上述进入区域设定部在上述第二自动行驶控制中,将包含与上述连接路径连接的并列路径的始端位置的规定区域设定为上述进入区域。
[0154]
根据本结构,在作业车辆通过基于第二自动行驶控制的自动行驶而到达进入区域的时刻,在第一自动行驶控制的开始条件成立的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆以作业状态按照并列路径自动行驶。或者,在第一自动行驶控制的开始条件未成立的情况下,自动行驶控制部不执行第一自动行驶控制,而执行自动之字行驶控制,使作业车辆进行之字行驶。之后,在第一自动行驶控制的开始条件通过该之字行驶而成立的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆以作业状态按照并列路径自动行驶。
[0155]
即,能够使作业车辆按照经由各连接路径以行驶顺序连接的多条并列路径,以相对于各并列路径的摆动幅度小且精度高的状态,良好地进行自动行驶。由此,用户不再需要使作业车辆从并列路径的终端位置手动行驶至接下来的并列路径的始端位置,由此能够减轻对用户的负担。
[0156]
本发明的第七特征结构的特征点在于,上述进入区域设定部在上述第一自动行驶控制被中断的情况下,将上述并列路径中的包含上述第一自动行驶控制的中断位置的规定区域设定为上述进入区域。
[0157]
根据本结构,例如,在作业车辆是联合收割机等收获作业车辆的情况下,如果在收获物仓满时,中断第一自动行驶控制,使作业车辆移动至规定的排出位置排出收获物之后,再使作业车辆移动至包含第一自动行驶控制的中断位置的进入区域,再次开始自动行驶,则在此时刻,在第一自动行驶控制的开始条件成立的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆从第一自动行驶控制的中断位置以作业状态按照并列路径自动行驶。或者,在第一自动行驶控制的开始条件未成立的情况下,自动行驶控制部执行自动之字行驶控制,在包含中断位置的进入区域中使作业车辆进行之字行驶。之后,在第一自动行驶控制的开始条件通过该之字行驶而成立的情况下,自动行驶控制部执行第一自动行驶控制,使作业车辆以作业状态按照并列路径进行自动行驶。
[0158]
即,即便在使作业车辆回归至第一自动行驶控制的中断位置而再次开始作业车辆的自动行驶的情况下,也能以相对于并列路径的摆动幅度小且精度高的状态良好地再次开始自动行驶。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1