用于运输有效负载的自主移动机器人系统的制作方法
1.本发明涉及用于通过自主移动机器人(autonomous mobile robot,amr)运输商品和有效负载的移动机器人系统,该自主移动机器人可配置用于移动推车、轮式搁板和保持物品或操纵器的其他设备(包括放置在此类设备上的有效负载)。更具体地,本发明涉及一种amr,其中待移动设备被设计成允许amr在设备下方移动,与其互连,可能(略微)提升设备,并且此后将包括其有效负载的设备移动或滚动到预期目的地。
背景技术:
2.自主移动机器人(amr)用于移动推车、轮式搁板和保持物品或操纵器的其他设备(包括放置在此类设备上的有效负载)。
3.通常,待移动设备具有框架或放置在具有支撑构件(支腿、轮子等)的框架上,从而允许amr在其下方移动,与其互连,可能(略微)提升设备,并且此后重新定位设备。
4.用于工业用途的amr专门设计用于安全自主驾驶。amr安全系统包括用于检测amr周围的预定义保护区中的障碍物的装置,以及用于在与在限定的保护区内检测到的任何障碍物碰撞之前使amr安全停止的装置。检测amr周围障碍物的已知解决方案将彼此相对的两个激光扫描仪安装在通常为矩形的amr的拐角处。每个扫描仪通常覆盖270
°
视场,即,从amr的一侧到对应拐角的另一侧。由此,两个扫描仪可以覆盖amr周围的保护区。
5.已知扫描仪解决方案的实例是施克(sick)公司的安全扫描仪[1]。
[0006]
虽然amr如此设计以用于没有阻碍其激光扫描仪的视野时的安全自主驾驶,但是移动在激光扫描仪附近具有支撑构件的附接设备或有效负载框架对安全系统提出了挑战并且增加了无法及时检测到障碍物的风险。位于激光扫描仪附近的支撑构件产生障碍物无法被检测到的盲点区域。这尤其与如下amr相关,推进装置(例如,驱动轮子)位于amr底部的中心附近,允许amr现场转动角度。
[0007]
omron的美国专利号us10168711公开了一种移动平台和一种用于移动有效负载的推车。
[0008]
omron adept移动平台在前面具有扫描仪。如下使用推车,其中前部支撑构件被设计成使得它们在前部扫描仪的视野之外,该前部扫描仪放置在移动机器人的前部的中间。此外,omron移动机器人配备有3个附加扫描仪,以分别覆盖推车的每个侧面和背面的安全区域。这是昂贵且复杂的解决方案,因为每个移动机器人必须配备有4个扫描仪。此外,在机器人侧面的扫描仪放置在从移动机器人突出的杆上。由此,无论移动机器人在具有还是不具有推车的情况下驾驶,占地面积扩大。
[0009]
roeq aps的另一件专利申请wo2019/063816[3]公开了一种用于连接自主移动机器人的系统。所说明的机器人具有顶部模块,用于与推车或搁板连接并提升推车或搁板。挑战在于是amr通常在所有4个侧面上具有保护区。在推车/搁板下方移动amr时,推车/搁板的支撑装置将放置在amr的每一个侧面上的正常保护区内。同时,驾驶方向上的保护区仍然有效。当移动机器人可以围绕其中心点转动时,存在在转向操作期间机器人侧面的障碍物可
能被推车/搁板,尤其是其支撑装置(有可能轮子)撞击的风险。用于克服这一点的可能解决方案是每当移动机器人处于推车/搁板下方时机器人侧面的保护区静音。或者,amr侧面的保护区可以制作为足够窄,使得它们无法覆盖推车或搁板的支撑构件。此类解决方案对于较小/轻型负载的amr来说是可接受的,提供了低安全风险,但是对于较大/重型负载的amr来说可能是危险的。
[0010]
本发明的目的是克服这些缺点并且提供通过使用amr来运输重型有效负载的安全系统。本技术提出用于借助配备有一些、优选地两个安全扫描仪的amr和通过使用具有支撑构件的有效负载搁架或推车来安全运输商品和有效负载的本发明系统,其中在amr周围的所有四个侧面处的所得保护场为移动/转动的amr附近的人员和/或障碍物提供足够的安全性。
技术实现要素:
[0011]
本发明提供了一种包括amr和待移动设备的组合的运输系统,该运输系统可以在工业/商业环境内安全且有效地操作,同时amr和待移动设备可以成本高效的方式生产。
[0012]
因为待移动设备的占地面积通常大于amr的占地面积,amr的安全系统必须适于在设备的运输期间在整个设备周围提供放大的保护区。另一个挑战在于,待移动设备通常会具有一些支撑构件(支腿、轮子等),这些支撑构件在移动时保持在设备或框架下方。为了防止将这些支撑装置识别为保护区内的障碍物,必须设计保护区和支撑装置的组合,使得安全和/或预期操作不存在冲突。
[0013]
本发明的特定目的在于:
[0014]
·
提供待移动设备的支撑构件到某些位置的重新定位,在该位置中支撑构件对安全系统没有影响或只有可忽略不计的影响;
[0015]
·
提供待移动设备,该待移动设备可以携带有效负载高达250kg,优选地高达500kg,更优选地高达1000kg,最优选地高达2000kg,并且不限于较重型有效负载;
[0016]
·
提供用于amr的安全传感器系统,该安全传感器系统可以提供围绕amr和待移动设备的保护区,并且其中待移动设备的支撑构件对安全性没有影响或只有可忽略不计的影响。
[0017]
本发明的另一个目的在于在驾驶之前和期间确保推车/搁板与amr的正确附接。
附图说明
[0018]
为了更好地理解本发明并且了解其实际应用,提供并参考以下附图。附图仅作为实例给出,并且绝不应限制本发明的范围。
[0019]
图1描绘了当amr与四个支撑构件(支腿、轮子)定位于amr的侧面附近的典型有效负载框架配合时amr安全扫描仪的视野中的盲点;
[0020]
图2描绘了本发明的最优选实施方案,其中支撑构件相对于amr主体和中心不对称地分布,仍然定位在amr的侧面;
[0021]
图3描绘了本发明的替代实施方案,其中支撑构件从amr的侧面离开来到amr的拐角的延伸部,或者使用比amr大的支撑构件定位在amr的拐角上的框架/推车。
[0022]
图4描绘了本发明的另一替代实施方案,其中考虑到非危险的光有效负载、amr的
缓慢运动和amr可能向人类发出的视觉和声纳信号,可以将保护场减小到推车的周边。在这个实施方案中,系统主要用于识别在附接或运输期间推车处于正确位置。
[0023]
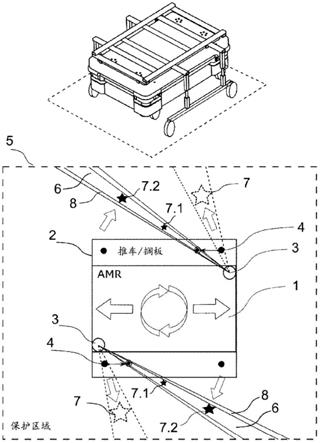
图5描绘了通过采用有效负载支撑构件作为amr的精确定位界标来精确定位和紧固amr到待移动设备的实施方案。
[0024]
图6中a到c描绘了在有效负载运输期间定位、固定或紧固到amr上时推车/搁板框架及其支撑构件的构造:图6中a-具有框架的amr的侧视图,图6中b-具有框架的amr的前/后视图,图6中c-具有框架的amr的透视图。
[0025]
附图标记
[0026]
1自主移动机器人(amr);
[0027]
2借助amr的待移动设备,至少支撑构件(支腿、轮子)上的推车/搁板;
[0028]
3安装在amr的相对拐角上的270
°
安全扫描仪(例如,激光雷达);
[0029]
4借助amr的待移动设备的支撑构件(支腿、轮子);
[0030]
5amr和推车/搁板共同的预定义保护区域或保护区;
[0031]
6通过配置安全扫描仪系统的保护区所产生的盲区/角度,忽略了从扫描仪看到的特定角度范围内的物体。
[0032]
7盲区中的可能障碍物;
[0033]
7.1amr的中心附近的障碍物,预期由于在amr旋转期间amr中心附近的转向速度最小化而安全。
[0034]
7.2远离amr中心的障碍物,预期由于在amr旋转期间距amr拐角较长的距离而安全。
[0035]
7.3盲区中的障碍物,从amr的拐角延伸,在amr旋转期间amr的拐角无法达到。
[0036]3’
当amr被精确地定位并固定在待移动设备、推车或搁板下方时安全扫描仪(例如,激光雷达)的假想位置。
[0037]4’
支撑构件的假想位置,作为amr的精确标志,了解在待移动设备、推车或搁板下方的精确定位和固定该amr。
[0038]
8支撑构件周围的窄公差区域,对于盲区来说可以忽略。
[0039]
9在amr顶部上的凸头/凸起区域,用于略微提升待移动设备(推车/搁板)并且将amr固定到待移动设备(推车/搁板)。
[0040]
10推车/搁板的框架上的装置,用于将推车/搁板固定到amr上进行运输。
具体实施方式
[0041]
应理解,阐述了许多具体细节以提供对本发明的示例性实施方案的完整和全面描述。然而,技术人员将理解,实施方案的细节程度不限制本发明。尚未详细描述众所周知的方法、程序和组件,以确保实施方案不带误导性。此外,描述不应被解释为限制本发明,而是作为实施方式。
[0042]
虽然如图所示和所描述的本发明的实例或其方面包括在特定公共空间或位置中描绘的多个组件,但是一些组件可以远离。还应理解,所提供的实例不限于所描述的组件,并且包括功能和与其他组分相互作用所必需的其他元件,该其他元件的存在显而易见,并且因此不详细描述。
[0043]
图1中描绘了基本问题和解决方案。图1的右上角说明了附接有推车的amr。矩形amr 1在amr的两个相对拐角配备有两个安全扫描仪(优选地,激光雷达)3。每个安全扫描仪3可以在270
°
视野内扫描,从而覆盖amr 1的所有四个侧面的区域。安全扫描仪系统设置为在amr 1的四个侧面中的每一个侧面处建立预定义保护区域(安全区)5。需要在amr 1的右侧和左侧处的保护区5,以防止障碍物7被转动的amr 1撞击。问题在于amr 1的正常安全系统将推车/搁板2的支撑元件4识别为障碍物并使amr 1停止。现有技术解决方案损害了运输系统的安全性、成本和/或效率或最大有效负载。
[0044]
在没有设备的驾驶期间,设置amr 1的每一个侧面处的保护区5以覆盖矩形保护区域5。在待移动设备2下方对接期间,amr 1左侧和右侧的保护区5无效。在对设备2进行正确的对接/附接之后,设置新的较大保护区5以忽略支撑构件4预期所在的区域。通过将支撑构件4制作为尽可能薄,并且通过配置安全扫描仪3系统的保护区使得覆盖支撑构件4的角度间隔和围绕其的窄公差扇区8被忽略(当支撑元件4处于其正确位置时),支撑元件4后面的盲角6保持相对较窄。优点在于,在转向操作开始时相对短的时间,仅相对较小的物体可以被覆盖。因此:
[0045]
·
检测amr 1与待移动设备2之间的任何未对准。
[0046]
·
防止未授权设备和部分缺陷的设备移动。
[0047]
系统的优选实施方案呈现具有不对称定位的支撑构件4的待移动设备-推车/搁板2。图2中的图片说明优选实施方案,其中最接近两个(不对称地放置)安全扫描仪3的两个支撑构件4移近推车/搁板2的侧面的中心,并且可能具有减小的直径。由此提供了不对称支撑结构。
[0048]
安全扫描仪系统的保护区5被设置为在这些支撑元件4周围在实践上尽可能窄的角度间隔内忽略盲区区域6。
[0049]
支撑元件5后面的保护区域5中的盲角6由此在amr/推车/搁板的侧面的中心开始并且延伸到保护区域5附近(靠近保护区域5的拐角)。
[0050]
如果在amr 1侧面的中心附近的盲角6中有障碍物7.1,那么这不那么严重,因为在转向操作期间,amr 1和推车/搁板2在这个中心侧面区域内仅存在相对较小且相对缓慢的位移。另外,障碍物7.1在转向操作期间被amr轮子或可能推车/搁板2的轮子撞击的风险较低。
[0051]
如果障碍物7.2出现在靠近amr 1的拐角的盲角6内,那么当amr 1开始转动并且由此检测障碍物7.2时,保护区域5的主动部分将相对快速地移动。当在保护区域5内和盲区6外部检测到障碍物7.2时,接着停止转向操作。转向速度优选地设置为低,以允许及时停止。
[0052]
图3中呈现了一个替代实施方案,其中允许支撑构件4从amr 1的侧面进一步离开来到amr拐角的延伸部,或者使用拐角上具有支撑构件4的较大占地面积推车2,并且保护区域5相应地放大到至少推车的尺寸。这个实施方案将盲区6定位到推车/搁板2的拐角外部。如果amr 1围绕其中心转动,那么这些盲区6已经不会危及撞击amr 1和推车/搁板2周围的任何障碍物7。在这个特定实施方案中,可以发生具有理论车道的罕见情况,其中对于安全扫描仪3来说障碍物7可以保持被支撑构件4隐藏,例如当amr转动延伸的弧并且由此变得非常接近或甚至与支撑构件4接触时。此外,有可能通过软件手段防止这种情况,通过设置用于amr的一些特殊转动轨迹。
[0053]
图4中呈现另一个替代实施方案,其中允许保护区5减小到amr 1的周边和推车/搁板2的周边。如果有效负载是非危险的光,那么这个方法适用,amr的运动相对较慢,并且amr 1还为人类提供清晰的视觉和声纳信号。在这种情况下,即使amr可能会在运动期间稍有触碰,盲区6也不会危及伤害人类或损坏周围物体。
[0054]
在一些解决方案中,amr可以包括添加的额外传感器。然后,在中心周围的amr侧面上的盲区/角度6(盲角6(如图2))可以完全避免。由于这些传感器的安全性要求高,每个机器人的成本都会增加,但推车/搁板可以保持更传统和简单的设计。额外传感器可以提供额外安全性,但也会提供额外的成本和空间。然而,旨在保护人类免受高风险影响的安全扫描仪相对昂贵。如果与推车修改组合,可以使用一些较小、较便宜的传感器,以减少残留风险。另一种具有附加设备的解决方案可以采用借助额外镜子的激光雷达束的投影。通过镜子实施投影,并且这可以是用于避免盲点的低成本解决方案。然而,在工业环境中,存在镜子将被污垢覆盖的风险,并且在某些时间不会提供预期安全性。而且,镜子设置对镜子/传感器的错位非常不耐受。
[0055]
通常,为了最小化由于转动引起的风险,需要amr 1上具有方向指示器。另外,amr 1可以被编程为仅以减小的速度进行软转动。此外,扩大保护区5通常可以降低人类接近驾驶/转向amr 1的风险。
[0056]
另外,如果盲点6围绕预期支撑构件4很狭窄,那么只要推车2处于正确位置,安全扫描仪系统就可以忽略支撑构件4,但是在推车2没有处于与amr 1紧固的正确位置的情况下将盲点6识别为障碍物。这个特征可以用作对接过程期间的导航帮助,并且如果根据实例推车/搁板2在amr上滑动,具有在移动时掉落的风险,那么可以使用这个特征作为警告。图5中描绘了将amr 1精确对接到推车/搁板2的实施方案,通过采用有效负载支撑构件4作为amr的精确定位界标4'。在本文中,amr 1具有与推车/搁板2的支撑构件4相对应的精确界标4'的存储器。当amr 1在推车/搁板2下方对接时,通过将界标4'与推车2的支撑构件4匹配来指示确切的对接位置。
[0057]
通过控制系统来确保对amr驾驶和安全性的控制。amr包括安全扫描仪系统,该安全扫描仪系统具有至少两个安全扫描仪3,优选为激光雷达,其中两个安全扫描仪3安装在amr 1的两个相对拐角上,每个安全扫描仪3在amr 1周围扫描270
°
扇区。安全扫描仪系统还具有扫描仪控制系统,该扫描仪控制系统适于分别配置有围绕amr和推车或搁板的占地面积的不同可选保护区5,其中不同可选保护区5具有不同形状和尺寸。此外,amr包括控制系统,该控制系统用于在推车或搁板2下方自主驾驶并对接amr 1,附接推车或搁板2,并且将推车或搁板2运输到预定义目的地点。用于自主驾驶并对接amr 1的控制系统适于将控制信号发送到扫描仪控制系统,用于选择适用于amr的不同操作模式的保护区5的一个或若干个预配置轮廓。每当推车或搁板2附接到amr 1时,选择的预配置保护区轮廓(图5)被配置成具有比推车2的占地面积宽的尺寸,并且具有带有楔形切口的基本上矩形的形状(保护区5中的预定义盲区6),使得通过选择的预配置保护区轮廓从保护区5中排除正确附接的推车/搁板2的正确定位和固定的支撑构件4。
[0058]
另外,在运输期间,amr 1到推车/搁板2的定位是通过使用推车/搁板支撑构件4的预定义位置4'和在有效保护区轮廓中的楔形盲区6来连续检查,以便识别在运输期间推车/搁板2是否处于其正确附接的位置。
[0059]
尽管本说明书包括本发明的许多特性和优点以及结构细节和特征,但是描述作为本发明实施方案的实例给出。根据权利要求中所用术语的广泛理解的定义,在不脱离本发明的原理的情况下,可以更改细节,尤其是材料的形式、大小和布局的细节。
[0060]
引用列表
[0061]
非专利型文献
[0062]
1.施克安全扫描仪:
[0063]
https://cdn.sick.com/media/docs/3/13/613/operating_instructions_s300_safety_laser_scanner_en_im0017613.pdf,第70页。
[0064]
专利文献
[0065]
2.omron的专利申请us20170072558/专利us10168711b2。
[0066]
3.roeq aps的专利申请wo2019/063816。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1