一种高可靠性拖拉机安全控制装置及控制方法与流程
1.本发明属于拖拉机安全控制技术领域,具体涉及一种高可靠性拖拉机安全控制装置及控制方法。
背景技术:
2.随着拖拉机行业安全意识的提高,人们对拖拉机的安全性要求也随之增加。如何在作业过程中保证拖拉机可靠稳定地安全启动、行驶、驻车已成为农机厂商和农机用户共同关心的问题。当前市场上没有能够满足拖拉机安全性功能及性能要求的控制装置,因此开发一款高可靠性拖拉机安全控制装置已成为农机用户的迫切需求。
3.专利号为cn207931652u的实用新型专利公开了一种车用智能安全控制器,该专利提到的车用智能安全控制器主要应用于工程车辆,控制器内部主要由微控制单元mcu、常开继电器、常闭继电器以及报警单元组成。控制器上电后,通过采集st启动开关、pto启停开关、发电机状态及微动开关组传送的信号,控制常开继电器、常闭继电器的通断状态进而通过离合器安全开关和pto离合电磁阀实现对发动机和动力输出单元pto的安全启动控制,并能通过报警单元实现报警提醒。在控制逻辑上实现了:驻车声光报警,即驾驶员离开座椅但车辆处于非驻车状态时发出声光报警;动力输出单元pto自断电,即驾驶员离开座椅且车辆处于空挡位但动力输出单元pto依然工作时执行动力输出单元pto五秒后自动停止工作;发动机启动过程中报警,即车辆启动时需要车辆处于驻车状态、驾驶员在座椅上、车辆处于空挡状态、st启动开关闭合且动力输出单元不工作同时满足,如果任何一个条件不满足,安全控制器控制蜂鸣器及报警指示灯以不同的发声间隔和闪烁频率发出报警提示。
4.上述安全控制器主要应用场所为工程车辆,其可靠性不高,造成控制器可靠性不高的主要因素有以下几点:(1)将常开继电器、常闭继电器等抗震性能差且功率大的电子器件直接设计在控制器内部,导致控制器应用在工程车辆、拖拉机等震动较大的移动机械上时可靠性降低;(2)在各种控制逻辑中,对输入的开关信号并未做防误操作处理而直接用来进行逻辑判断,导致控制器逻辑判断结果的准确性下降。而且,在拖拉机安全控制的实现方面,除面临以上问题外,还存在can总线信号异常、车辆熄火断电但未驻车等影响安全控制结果的问题。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种可对拖拉机安全运行进行稳定、可靠控制的安全控制装置及方法,以有效的解决上述问题。
6.为了达到上述目的,本发明所采用的技术方案是:一种高可靠性拖拉机安全控制装置,包括车载电瓶、输入开关组件、安全控制器、执行器组件和整车can总线,车载电瓶分别连接至输入开关组件、安全控制器和执行器组件,输入开关组件连接至安全控制器的输入端,安全控制器的输出端连接至执行器组件,整车can总线与安全控制器之间双向连接。
7.进一步的,所述输入开关组件包括上电开关、点火运行钥匙开关、空挡开关、
pto1000开关、驻车制动开关、后提升低位开关和座椅开关,上述开关的电源端均连接至车载电瓶并由车载电瓶进行供电,且上述开关的信号端分别连接至安全控制器的输入端。
8.进一步的,所述执行器组件包括启动继电器、蜂鸣器继电器、油路切断电磁阀、发动机启动电机、报警蜂鸣器以及发动机燃油油路,其中,启动继电器、蜂鸣器继电器和油路切断电磁阀三者均包括线圈端和触点端,三者线圈端的一端以及触点端的一端均连接至车载电瓶,三者线圈端的另一端均与安全控制器的输出端相连,三者触点端的另一端分别对应连接至发动机启动电机、报警蜂鸣器和发动机燃油油路。
9.进一步的,所述安全控制器包括电源模块、开关信号采集模块、主控芯片模块、执行器驱动模块以及与整车can总线双向连接的can通信模块,其中,电源模块的输入端连接至车载电瓶,输出端分别与开关信号采集模块、主控芯片模块、执行器驱动模块和can通信模块的电源端相连,开关信号采集模块依次与主控芯片模块和执行器驱动模块相连,且主控芯片模块与can通信模块之间为双向连接。
10.进一步的,所述电源模块包括+12v电源输入模块、使能禁能控制模块、电压转换控制模块以及电源输出模块,其中,+12v电源输入模块的输入端连接至车载电瓶,所述主控芯片模块的控制引脚和上电开关共同连接至使能禁能控制模块的输入端,使能禁能控制模块和+12v电源输入模块两者的输出端共同连接至电压转换控制模块后与电源输出模块相连,该电源输出模块的输出端分别与开关信号采集模块、主控芯片模块、执行器驱动模块和can通信模块的电源端相连。
11.本发明一种高可靠性拖拉机安全控制装置的控制方法,包括以下步骤:步骤1)、上电开关接通后,该安全控制装置上电运行,主控芯片模块驱动其控制引脚输出高电平,进而控制引脚与上电开关共同使能电源模块输出+5v电源,之后主控芯片模块进入主循环;步骤2)、在主循环过程中,输入开关组件中的各个开关向安全控制器提供输入信号,安全控制器根据接收到的输入信号以及整车can总线发送来的转速信号进行安全策略运算,并根据运算结果控制执行器组件执行相应动作;其中,所述的输入信号包括各个开关的状态信息;所述的相应动作包括以下工作进程:a、启动继电器上电工作进程,该进程通过驱动启动继电器接通、油路切断电磁阀断开,实现拖拉机打火启车;b、启动继电器掉电停止工作进程,该进程在拖拉机启车后并进入正常运行状态下停止启动继电器工作;c、蜂鸣器继电器上电工作进程,该进程在拖拉机熄火后并存在安全隐患的状态下,驱动蜂鸣器继电器接通,实现报警提示;d、蜂鸣器继电器掉电停止工作进程,该进程在拖拉机熄火后并消除安全隐患的状态下,停止蜂鸣器继电器工作;e、油路切断电磁阀上电工作进程,该进程在拖拉机运行过程中存在安全隐患的状态下,驱动油路切断电磁阀接通、蜂鸣器继电器接通,实现拖拉机紧急断油熄火并进行报警提示;f、安全控制装置断电进程,该进程在拖拉机熄火断电后并消除所有安全隐患的状
态下,自行断开该安全控制装置的电源模块,停止安全控制装置的工作。
12.与现有技术相比,本发明的有益效果是:本发明在工作时,输入开关组件中的各个开关向安全控制器提供输入信号,安全控制器根据接收到的输入信号以及整车can总线发送来的转速信号进行安全策略运算,可实现在作业过程中保证拖拉机可靠稳定地安全启动、行驶、驻车,满足了拖拉机用户的迫切需求。
附图说明
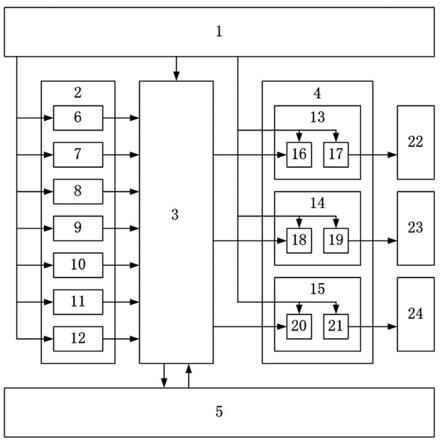
13.图1是本发明一种高可靠性拖拉机安全控制装置的原理框图;图2是安全控制器的原理框图;图3是电源模块的原理框图;图中标记:1、车载电瓶,2、输入开关组件,3、安全控制器,4、执行器组件,5、整车can总线,6、上电开关,7、点火运行钥匙开关,8、空挡开关,9、pto1000开关,10、驻车制动开关,11、后提升低位开关,12、座椅开关,13、启动继电器,14、蜂鸣器继电器,15、油路切断电磁阀,16、启动继电器的线圈端,17、启动继电器的触点端,18、蜂鸣器继电器的线圈端,19、蜂鸣器继电器的触点端,20、油路切断电磁阀,21、油路切断电磁阀的触点端,22、发动机启动电机,23、报警蜂鸣器,24、发动机燃油油路,25、电源模块,26、开关信号采集模块,27、主控芯片模块,28、执行器驱动模块,29、can通信模块,30、+12v电源输入模块,31、使能禁能控制模块,32、电压转换控制模块,33、电源输出模块。
具体实施方式
14.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.如图1所示,一种高可靠性拖拉机安全控制装置,包括:车载电瓶1、输入开关组件2、安全控制器3、执行器组件4、整车can总线5。车载电瓶1分别与输入开关组件2、安全控制器3以及执行器组件4单向连接;输入开关组件2与安全控制器3单向连接;安全控制器3与执行器组件4单向连接,并与整车can总线5双向互相连接。
16.其中,输入开关组件2包括:上电开关6、点火运行钥匙开关7、空挡开关8、pto1000开关9、驻车制动开关10、后提升低位开关11和座椅开关12。上电开关6、点火运行钥匙开关7、空挡开关8、pto1000开关9、驻车制动开关10、后提升低位开关11和座椅开关12的电源端与车载电瓶1单向连接,信号端与安全控制器3单向连接。
17.执行器组件4包括:启动继电器13、蜂鸣器继电器14、油路切断电磁阀15、发动机启动电机22、报警蜂鸣器23以及发动机燃油油路24。启动继电器13的线圈端16一端与车载电瓶1单向连接,另一端与安全控制器3单向连接;触点端17一端与车载电瓶1单向连接,另一端与发动机启动电机22单向连接。蜂鸣器继电器14的线圈端18一端与车载电瓶1单向连接,另一端与安全控制器3单向连接;触点端19一端与车载电瓶1单向连接,另一端与报警蜂鸣器23单向连接。油路切断电磁阀15的线圈端20一端与车载电瓶1单向连接,另一端与安全控制器3单向连接;触点端21一端与车载电瓶1单向连接,另一端与发动机燃油油路24单向连
接。
18.车载电瓶1分别向输入开关组件2、安全控制器3以及执行器组件4供电。输入开关组件2向安全控制器3提供输入信号,安全控制器3根据输入开关组件2的输入信号以及整车can总线5发来的转速信号进行安全策略运算,并根据运算结果控制执行器组件4执行相应动作。输入开关组件2中的上电开关6表明拖拉机处于上电状态还是掉电状态,点火运行钥匙开关7表明拖拉机处于打火运行状态还是熄火状态,空挡开关8表明拖拉机处于空挡状态还是挂挡状态,pto1000开关9表明拖拉机处于动力输出状态还是动力切断状态,驻车制动开关10表明拖拉机处于驻车状态还是非驻车状态,后提升低位开关11表明拖拉机挂载的机具处于提升状态还是非提升状态,座椅开关12表明拖拉机驾驶员坐在驾驶座椅上还是已离开驾驶座椅。安全控制器3直接控制执行器组件4中的启动继电器13的线圈端16、蜂鸣器继电器14的线圈端18以及油路切断电磁阀15的线圈端20,并通过启动继电器13的触点端17、蜂鸣器继电器14的触点端19以及油路切断电磁阀15的触点端21控制发动机启动电机22、报警蜂鸣器23以及发动机燃油油路24。
19.如图2所示,安全控制器3包括:电源模块25、开关信号采集模块26、主控芯片模块27、执行器驱动模块28和can通信模块29。电源模块25与开关信号采集模块26、主控芯片模块27、执行器驱动模块28和can通信模块29单向连接以进行供电;开关信号采集模块26与主控芯片模块27单向连接;主控芯片模块27与执行器驱动28模块单向连接,并与can通信模块29双向互相连接。
20.安全控制器3的电源模块25将车载电瓶1输出的+12v电源转换为+3.3v电源以及+5v电源分别供主控芯片模块27以及执行器驱动模块28和can通信模块29使用,开关信号采集模块26实时采集输入开关组件2的各输入开关状态并发送给主控芯片模块27,主控模块根据开关信号采集模块26的输入值实时运行安全控制策略控制执行器驱动模块28输出相应值,执行器驱动模块28进一步控制执行器组件4中的启动继电器13的线圈端16、蜂鸣器继电器14的线圈端18以及油路切断电磁阀15的线圈端20执行相应动作,最终实现对发动机启动电机22、报警蜂鸣器23以及发动机燃油油路24的控制。
21.如图3所示,安全控制器的电源模块25包括:+12v电源输入模块30、使能禁能控制模块31、电压转换控制模块32以及电源输出模块33。+12v电源输入模块30与电压转换控制模块32单向连接,使能禁能控制模块31与电压转换控制模块32单向连接;电压转换控制模块32与电源输出模块33单向连接。
22.电源模块25的+12v电源输入模块30与车载电瓶1相连,由车载电瓶提供+12v电源。使能禁能控制模块31同时由上电开关6以及主控芯片模块27的控制引脚p40控制:在拖拉机上电一瞬间由上电开关6使能电压转换控制模块32控制电源输出模块33输出+3.3v以及+5v电源;上电期间间由上电开关6以及主控芯片模块27的控制引脚p40共同使能电压转换控制模块32控制电源输出模块33输出+3.3v以及+5v电源;掉电后由主控芯片模块27的控制引脚p40使能电压转换控制模块32控制电源输出模块33输出+3.3v以及+5v电源。
23.本发明一种高可靠性拖拉机安全控制装置的控制方法,包括以下步骤:步骤1)、拖拉机上电开关6接通后,安全控制装置上电运行。位于安全控制器3中的主控芯片模块27上的程序首先驱动p40引脚输出高电平,使p40引脚与上电开关6同时使能安全控制器3的电源模块25输出+5v电源,之后程序进入主循环。
24.步骤2)、在主循环过程中,输入开关组件中的各个开关向安全控制器提供输入信号,安全控制器根据接收到的输入信号以及整车can总线发送来的转速信号进行安全策略运算,并根据运算结果控制执行器组件执行相应动作:所述的输入信号包括各个开关的状态信息;所述的相应动作包括以下工作进程:a、启动继电器上电工作进程,该进程通过驱动启动继电器接通、油路切断电磁阀断开,实现拖拉机打火启车;b、启动继电器掉电停止工作进程,该进程在拖拉机启车后并进入正常运行状态下停止启动继电器工作;c、蜂鸣器继电器上电工作进程,该进程在拖拉机熄火后并存在安全隐患的状态下,驱动蜂鸣器继电器接通,实现报警提示;d、蜂鸣器继电器掉电停止工作进程,该进程在拖拉机熄火后并消除安全隐患的状态下,停止蜂鸣器继电器工作;e、油路切断电磁阀上电工作进程,该进程在拖拉机运行过程中存在安全隐患的状态下,驱动油路切断电磁阀接通、蜂鸣器继电器接通,实现拖拉机紧急断油熄火并进行报警提示;f、安全控制装置断电进程,该进程在拖拉机熄火断电后并消除所有安全隐患的状态下,自行断开该安全控制装置的电源模块,停止安全控制装置的工作。
25.本发明中,安全控制器根据接收到的输入信号以及整车can总线发送来的转速信号进行安全策略运算,并根据运算结果控制执行器组件执行相应动作的具体控制原理如下:1.启动继电器13上电工作进程中首先判断整车can总线5信号是否正常:如果正常,则通过can总线采集拖拉机转速信号;如果异常,则无法获取拖拉机当前转速信号,为保证安全控制装置可靠运行,需通过其它条件代替转速信号完成判断,通常拖拉机打火启车时由0转/分达到怠速转速,持续时间不超过90秒,拖拉机熄火时由最高转速降至200转/分,持续时间不超过120秒,因此可通过点火运行钥匙开关7接通断开时间间接推断拖拉机当前转速(点火运行钥匙开关7接通时间超过90秒,表明拖拉机当前转速已达到怠速转速;点火运行钥匙开关7断开时间超过120秒,表明拖拉机当前转速已降至200转/分以下)。如果当前转速小于200转/分(拖拉机处于熄火状态),结合点火运行钥匙开关7接通(拖拉机处于打火状态)、空挡开关8接通(拖拉机处于空挡状态)、pto1000开关9断开(拖拉机未进行动力输出状态)、驻车制动开关10接通(拖拉机处于驻车状态)、后提升低位开关11接通(拖拉机挂载的机具处于提升状态)以及座椅开关12接通(拖拉机驾驶员坐在驾驶座椅上)则可判定初步满足启车条件,考虑到拖拉机安全控制装置的输入开关组件2均为机械开关,机械开关在接通和断开瞬间存在信号抖动,为保证安全控制装置的精准性及可靠性,对已初步满足启车条件的各输入开关状态进行50毫秒的延时处理,之后进一步判断各输入开关状态是否有变化:如果没有则确定满足启车条件,随后驱动启动继电器13接通、油路切断电磁阀15断开实现拖拉机打火启车运行,同时将启动继电器13接通标志置1;如果有则表明启车条件不满足,退出启动继电器上电工作进程。
26.2.对于启动继电器13等大功率器件,长时间上电工作将加速线圈老化,缩短工作
寿命,为尽可能延长启动继电器13工作寿命,保证安全控制装置的可靠性,需在拖拉机打火启车并正常运行后及时停止启动继电器13工作,该操作主要由启动继电器13掉电停止工作进程完成。在启动继电器13掉电停止工作进程中,根据拖拉机当前转速是否达到怠速转速以及启动继电器13接通标志是否置1进行判断:如果拖拉机当前转速达到怠速转速且启动继电器13接通标志已经置1,表明拖拉机已启车并正常运行,随后停止启动继电器13工作并将启动继电器13接通标志清0;如果拖拉机当前转速未达到怠速转速或启动继电器13接通标志未置1,表明拖拉机未正常启车或启动继电器13已停止工作,退出启动继电器13掉电停止工作进程。
27.3.在拖拉机熄火后但存在安全隐患的情况下,需运行蜂鸣器继电器14上电工作进程进行报警提示:首先判断整车can总线5信号是否正常:如果正常,则通过can总线采集拖拉机转速信号;如果异常,则通过点火运行钥匙开关7接通断开时间间接推断拖拉机当前转速。如果当前转速小于200转/分(拖拉机处于熄火状态),结合驻车制动开关10断开(拖拉机处于非驻车状态)、以及座椅开关12断开(拖拉机驾驶员不在驾驶座椅上)则可判定初步满足熄火报警条件,对已初步满足熄火报警条件的各输入开关状态进行50毫秒的延时处理,之后进一步判断各输入开关状态是否有变化:如果没有则确定满足熄火报警条件,随后驱动蜂鸣器继电器14接通实现拖拉机熄火报警,同时将熄火报警提示标志置1;如果有则表明熄火报警条件不满足,退出蜂鸣器继电器14上电工作进程。
28.4.在拖拉机熄火后并消除安全隐患的情况下,需运行蜂鸣器继电器14掉电停止工作进程停止报警:首先判断整车can总线5信号是否正常:如果正常,则通过can总线采集拖拉机转速信号;如果异常,则通过点火运行钥匙开关7接通断开时间间接推断拖拉机当前转速。如果当前转速小于200转/分(拖拉机处于熄火状态),结合熄火报警提示标志已置1同时驻车制动开关10接通(拖拉机处于驻车状态)、或座椅开关12接通(拖拉机驾驶员坐在驾驶座椅上)则可判定初步满足熄火停止报警条件,对已初步满足熄火停止报警条件的各输入开关状态进行50毫秒的延时处理,之后进一步判断各输入开关状态是否有变化:如果没有则确定满足熄火停止报警条件,随后停止蜂鸣器继电器14工作实现拖拉机熄火停止报警,同时将熄火报警提示标志清0;如果有则表明熄火停止报警条件不满足,退出蜂鸣器继电器14掉电停止工作进程。
29.5.在拖拉机运行过程中存在安全隐患的状态下需驱动油路切断电磁阀15接通及蜂鸣器继电器14接通,实现拖拉机紧急断油停机并进行报警提示,该操作由油路切断电磁阀15上电工作进程完成:首先判断整车can总线5信号是否正常:如果正常,则通过can总线采集拖拉机转速信号;如果异常,则通过点火运行钥匙开关7接通断开时间间接推断拖拉机当前转速。如果当前转速大于怠速(拖拉机处于正常运行状态),结合空挡开关8断开(拖拉机处于挂挡状态)、pto1000开关9接通(拖拉机进行动力输出状态)以及座椅开关12断开(拖拉机驾驶员不在驾驶座椅上)则可判定初步满足断油报警条件,对已初步满足断油报警条件的各输入开关状态进行进一步确认,考虑到拖拉机工作环境恶劣,驾驶员通常会因为车辆颠簸而弹离驾驶座椅,导致座椅开关12短暂断开(该情况下断开时间最长不超过3秒),最终造成安全控制装置误断油报警,为避免该情况,保证装置的可靠性,此处做5000毫秒的延时处理,之后进一步判断各输入开关状态是否有变化:如果没有则确定满足断油报警条件,随后驱动油路切断电磁阀15接通及蜂鸣器继电器14接通,实现拖拉机紧急断油停机并进行
报警提示;如果有则表明断油报警条件不满足,退出油路切断电磁阀15上电工作进程。
30.6.安全控制装置由车载电瓶1直接供电,在拖拉机上电开关断开后安全控制器装置由p40引脚使能电源模块输出+5v,继续正常工作以排除拖拉机熄火断电后的安全隐患。在安全隐患排除后,安全控制装置需及时自行断电停止工作,防止长时间工作造成车载电瓶1亏电,影响拖拉机后续运行。该功能由安全控制装置断电进程实现:结合驻车制动开关10结合(拖拉机处于驻车状态)、以及上电开关6断开(拖拉机处于熄火断电状态)则可判定初步满足安全控制装置断电条件,对已初步满足安全控制装置断电条件的各输入开关状态进行50毫秒的延时处理,之后进一步判断各输入开关状态是否有变化:如果没有则确定满足安全控制装置断电条件,随后驱动p40引脚输出低电平,实现安全控制装置断电停止工作;如果有则表明安全控制装置断电条件不满足,退出安全控制装置断电进程。
31.本发明一种可靠性拖拉机安全控制装置及控制方法,可实现在作业过程中保证拖拉机可靠稳定地安全启动、行驶、驻车,满足了拖拉机用户的迫切需求。
32.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1