一种高可靠性辣椒直播机遥控装置及控制方法与流程
1.本发明属于辣椒直播机辅助控制设备技术领域,具体涉及一种高可靠性辣椒直播机遥控装置及控制方法。
背景技术:
2.当前辣椒种植地形复杂多样,种植地块中时有田垄、沟渠、坡地出现,对于辣椒直播机操作人员而言作业环境恶劣;同时辣椒种植主要采用套种方式,即在已种有小麦、棉花等其它农作物的农田里套种辣椒,该种植方式对辣椒直播机操作人员的操作技能有较高要求,即:作业过程中不仅要保证播种质量,又不能对已有农作物造成损坏,大幅增加了操作人员的劳动强度。如何能够有效改善辣椒直播机操作人员的作业环境,降低劳动强度,提高作业效率,消除作业技能要求,使得足不入地即可实现规模种植成为农户朋友们共同关心的问题。
3.目前,具备遥控功能的辣椒直播机可使得操作人员足不入地即可实现规模种植,但是,当前市场上没有能够对辣椒直播机进行稳定可靠遥控的装置,因此开发一款高可靠性的专用于辣椒直播机的遥控装置成为农户朋友们的迫切需求。
4.专利号为cn202013513u的实用新型专利公开了一种带视频监控的农机遥控装置,该专利提到的带视频监控的农机遥控装置主要应用于手柄式拖拉机,主要由视频遥控器、无线视频采集器和指令接收控制器构成。视频遥控器由视频模块和控制模块组成;指令接收控制器与农机上的各执行机构电路连接;视频模块与无线视频采集器之间通过无线信号连接,控制模块与指令接收控制器之间通过无线信号连接。通过视频模块、无线视频采集器以及摄像头实现农机视频信号的实时采集显示;通过控制模块、指令接收控制器以及离合电机、油门电机和转向电机实现对农机的控制。该专利提到的遥控装置,只简单的进行图像的采集显示、控制指令的下发控制:对于遥控过程中,遥控信号失联等异常情况未进行处理;对于农机运行工况如发动机转速、机油压力、燃油液位等关键信息并未进行实时回传监测,使得控制人员在视距范围外很难精准了解农机当前状态。实际应用中该遥控装置的可靠性难以满足要求。
5.同时,专利号为cn109080566a的发明专利公开了一种轮式拖拉机遥控控制系统及控制方法,该专利提到的遥控系统,主要由无线视频传输装置、远端信号传输装置、车辆信号传输装置以及信号命令执行装置组成。无线视频传输装置通过视频监控器、遥控器端的无线视频信号接收模块、无线视频信号发射模块以及车载摄像头实现对拖拉机视频信号的实时采集;远端信号传输装置通过遥控控制按键面板、无线遥控信号传输处理模块以及液晶显示屏实现对拖拉机的控制并在液晶显示屏上显示控制结果。该专利提到的遥控装置同样存在未对遥控信号失联等异常情况进行处理、未对拖拉机的运行工况进行实时监控等问题,另外该专利的遥控装置将视频显示和控制结果显示分别放在视频监控器和液晶显示屏上完成,造成系统成本过高,农户朋友们无法接受。
6.而且,上述农机遥控装置主要应用在手柄式拖拉机或轮式拖拉机上,装置的可靠
性和实用性不高,造成该问题的主要原因有:控制过程中未对遥控信号失联等异常情况进行处理;未对农机运行工况数据进行实时监测。另外如将视频显示和控制结果分别放在两块屏上显示等设计方案,大幅增加装置成本,使得相关装置难以被市场广泛接受。
技术实现要素:
7.有鉴于此,本发明的目的是提供一种可靠性高且经济实用的辣椒直播机遥控装置及控制方法,可有效解决上述问题。
8.为了达到上述目的,本发明所采用的技术方案是:一种高可靠性辣椒直播机遥控装置,包括显示终端、遥控器、前置摄像头、后置摄像头以及连接至整车can总线的信号收发转换控制器,所述显示终端与遥控器之间通讯连接,遥控器与信号收发转换控制器之间以无线连接的方式实现双向连接,且信号收发转换控制器与所述的前置摄像头、后置摄像头以及整车can总线之间均为双向连接。
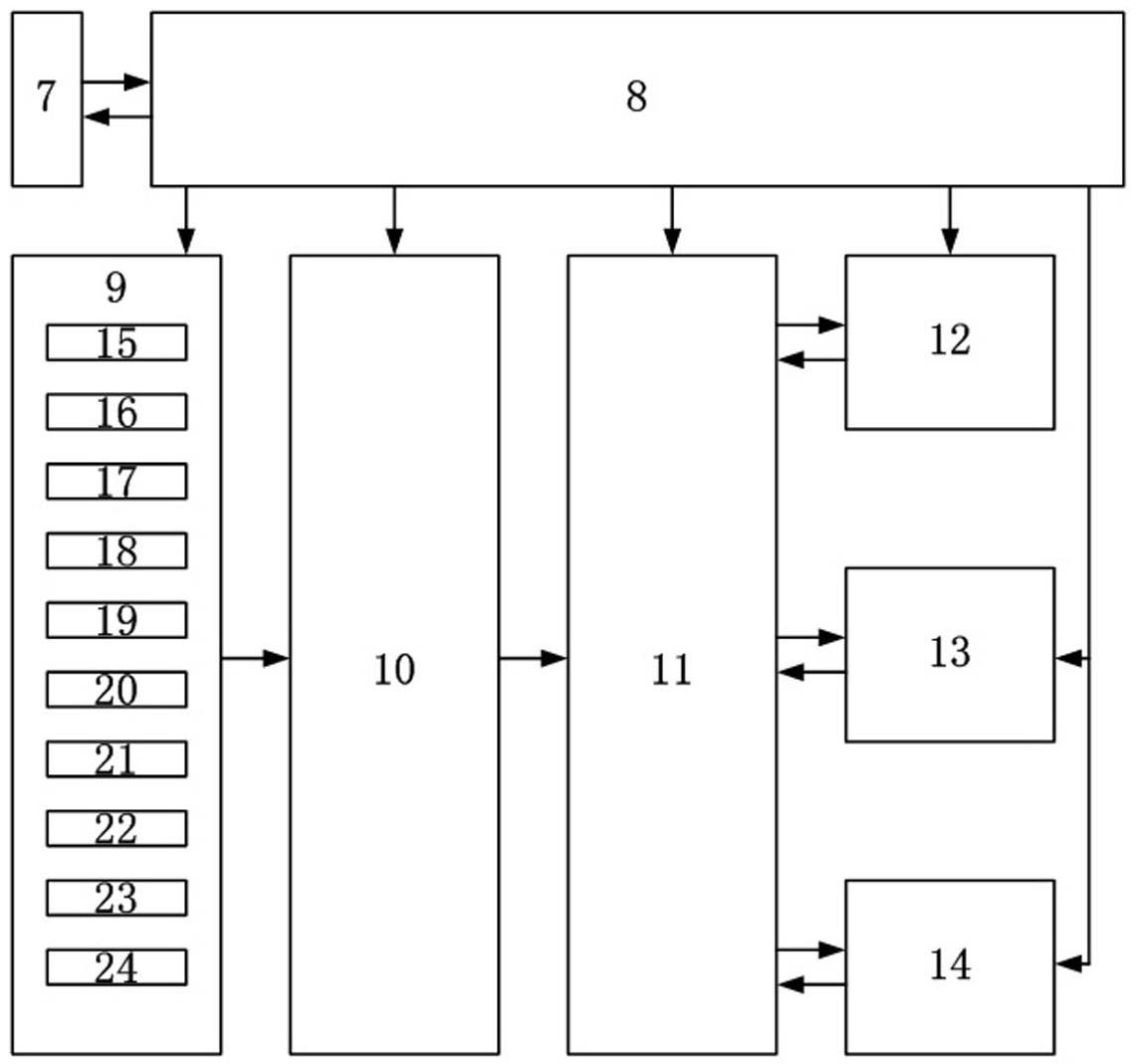
9.进一步的,所述遥控器包括控制开关组件、锂电池、电源管理模块、第一数据采集模块、第一主处理器模块、第一2.4g射频收发模块、蓝牙数据收发模块以及usb数据收发模块,其中,锂电池与电源管理模块双向互连,电源管理模块分别与控制开关组件、第一数据采集模块、第一主处理器模块、第一2.4g射频收发模块、蓝牙数据收发模块以及usb数据收发模块的电源端相连;控制开关组件的信号端依次与第一数据采集模块和第一主处理器模块相连,第一主处理器模块的输出端分别连接至所述的第一2.4g射频收发模块、蓝牙数据收发模块和usb数据收发模块且三者与第一主处理器模块之间均为双向连接,蓝牙数据收发模块和usb数据收发模块均双向连接至显示终端。
10.进一步的,所述控制开关组件包括车速增加按键、车速减小按键、转速增加按键、转速减小按键、转向遥柄、刹车遥柄、机具提升放置三段开关、行驶方向三段开关、报警喇叭开关以及地头模式开关,上述按键、遥柄以及开关均连接至第一数据采集模块的输入端。
11.进一步的,所述信号收发转换控制器包括电源模块、第二数据采集模块、第二主处理器模块、与第一2.4g射频收发模块双向连接的第二2.4g射频收发模块、视频切换控制模块、用于控制辣椒直播机动作的执行器驱动模块以及双向连接至整车can总线的can总线模块,其中,电源模块分别与第二数据采集模块、第二2.4g射频收发模块、第二主处理器模块、视频切换控制模块、执行器驱动模块以及can总线模块的电源端相连,第二数据采集模块的输入端连接至辣椒直播机上的车载陀螺仪,其输出端部连接至第二主处理器模块的输入端,第二主处理器模块的输出端分别连接至所述的第二2.4g射频收发模块、视频切换控制模块、执行器驱动模块以及can总线模块,其中,第二2.4g射频收发模块、视频切换控制模块以及can总线模块与第二主处理器模块之间均为双向连接,且视频切换控制模块分别与所述的前置摄像头和后置摄像头双向连接。
12.本发明的一种高可靠性辣椒直播机遥控装置的控制方法,包括以下步骤:步骤1)、遥控器上电后,一方面通过第一2.4g射频收发模块与信号收发转换控制器建立无线链路,另一方面通过蓝牙数据收发模块以及usb数据收发模块与显示终端建立监测数据链路和视频数据链路;步骤2)、遥控器通过接收到的信号执行相应的动作,具体如下:a、通过第一数据采集模块实时采集控制开关组件的状态信息,并通过第一2.4g射
频收发模块发送给信号收发转换控制器;b、通过蓝牙数据收发模块实时接收显示终端发来的指令并通过第一2.4g射频收发模块发送给信号收发转换控制器;c、通过第一2.4g射频收发模块实时接收信号收发转换控制器发来的辣椒直播机运行工况数据并通过蓝牙数据收发模块发送给显示终端进行实时显示;d、通过第一2.4g射频收发模块实时接收信号收发转换控制器发来的辣椒直播机前置摄像头与后置摄像头的视频数据并通过usb数据收发模块发送给显示终端进行实时显示;步骤3)、当信号收发转换控制器收到第一2.4g射频收发模块发送来的信息后,通过视频切换控制模块控制前置摄像头、后置摄像头动作,或者通过执行器驱动模块和can总线模块控制整车各执行部件执行相应动作。
13.进一步的,信号收发转换控制器通过can总线模块和第二数据采集模块实时采集辣椒直播机的运行工况数据,并将采集到的运行工况数据通过第二2.4g射频收发模块发送给遥控器。
14.进一步的,所述运行工况数据包括但不仅限于辣椒直播机的当前车速、转向状态、刹车状态、行驶状态、机具提升状态、报警状态以及上路状态。
15.进一步的,在辣椒直播机运行过程中,显示终端经由遥控器定时向信号收发转换控制器发送2.4g无线链路及蓝牙监测数据链路通断状态数据包,信号收发转换控制器收到该数据包即可向显示终端回应2.4g无线链路及蓝牙监测数据链路通断状态应答数据包;如果信号收发转换控制器在规定时间内未收到2.4g无线链路及蓝牙监测数据链路通断状态数据包,则认为当前辣椒直播机处于非受控状态并控制辣椒直播机进行急刹车同时驱动报警喇叭报警;如果显示终端在规定时间内未收到2.4g无线链路及蓝牙监测数据链路通断状态应答数据包,则向控制人员弹出无线数据链路中断报警提示框。
16.与现有技术相比,本发明的有益效果是:本发明通过对遥控器和信号收发转换控制器中各个模块的设置,以较低的成本即可实现对辣椒直播机远距离稳定可靠控制,使得农民朋友们足不入地即可实现辣椒规模种植,满足了农户朋友们的迫切需求。
附图说明
17.图1是本发明一种高可靠性辣椒直播机遥控装置的原理框图;图2是本发明中遥控器的原理框图;图3是本发明中信号收发转换控制器的原理框图;图中标记:1、显示终端,2、遥控器,3、信号收发转换控制器,4、前置摄像头,5、后置摄像头,6、整车can总线,7、锂电池,8、电源管理模块,9、控制开关组件,10、第一数据采集模块,11、第一主处理器模块,12、第一2.4g射频收发模块,13、蓝牙数据收发模块,14、usb数据收发模块,15、车速增加按键,16、车速减小按键,17、车速减小按键,18、转速减小按键,19、转向遥柄,20、刹车遥柄,21、机具提升放置三段开关,22、行驶方向三段开关,23、报警喇叭开关,24、地头模式开关,25、电源模块,26、第二数据采集模块,27、第二主处理器模块,28、第二2.4g射频收发模块,29、视频切换控制模块,30、执行器驱动模块,31、can总线模块。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1所示,一种高可靠性辣椒直播机遥控装置,包括:显示终端1、遥控器2、信号收发转换控制器3、前置摄像头4、后置摄像头5以及整车can总线6,显示终端1与遥控器2双路双向连接;遥控器2与信号收发转换控制器3以无线方式双向互连;信号收发转换控制器3与前置摄像头4、后置摄像头5以及整车can总线6之间均为双向连接。
20.如图2所示,遥控器2包括:控制开关组件9、锂电池7、电源管理模块8、第一数据采集模块10、第一主处理器模块11、第一2.4g射频收发模块12、蓝牙数据收发模块13以及usb数据收发模块14。控制开关组件9包括:车速增加按键15、车速减小按键16、转速增加按键17、转速减小按键18、转向遥柄19、刹车遥柄20、机具提升放置三段开关21、行驶方向三段开关22、报警喇叭开关23以及地头模式开关24。锂电池7与电源管理模块8双向互连;电源管理模块8分别与第一数据采集模块10、第一主处理器模块11、第一2.4g射频收发模块12、蓝牙数据收发模块13以及usb数据收发模块14的电源端单向连接;控制开关组件9与第一数据采集模块10单向连接;第一数据采集模块10与第一主处理器模块11单向连接;第一主处理器模块11分别与第一2.4g射频收发模块12、蓝牙数据收发模块13以及usb数据收发模块14双向互连。
21.电源管理模块8一方面实现对锂电池7的充电管理,防止锂电池在充电过程中发生过冲、过热等问题;另一方面将锂电池的输出电压转换为+3.3v和+5v,其中+3.3v供第一数据采集模块10以及第一主处理器模块11使用, +5v供第一2.4g射频收发模块12、蓝牙数据收发模块13以及usb数据收发模块14使用。
22.如图3所示,信号收发转换控制器3包括:电源模块25、第二数据采集模块26、第二主处理器模块27、第二2.4g射频收发模块28、视频切换控制模块29、执行器驱动模块30以及can总线模块31。电源模块25与第二2.4g射频收发模块28、第二主处理器模块27、视频切换控制模块29、执行器驱动模块30以及can总线模块31的电源端单向连接;第二数据采集模块26与第二主处理器模块27单向连接;第二主处理器模块27分别与第二2.4g射频收发模块28、视频切换控制模块29以及can总线模块31双向互相连接,与执行器驱动模块30单向连接;can总线模块31与整车can总线6双向连接。
23.电源模块25将来自整车电瓶的+12v电源分别转换为+3.3v和+5v,其中+3.3v供第二主处理器模块27使用, +5v供第二2.4g射频收发模块28、视频切换控制模块29、执行器驱动模块30以及can总线模块31使用。
24.本发明高可靠性辣椒直播机遥控装置的控制方法具体包括以下过程:【1】遥控器2上电后一方面通过第一2.4g射频收发模块12与信号收发转换控制器3建立无线链路;另一方面通过蓝牙数据收发模块13以及usb数据收发模块14与显示终端1建立监测数据链路和视频数据链路。之后,遥控器通过接收到的信号执行相应的动作,具体如下:a、遥控器2通过数据采集模块10实时采集控制开关组件9的状态信息并通过第一
2.4g射频收发模块12按照sbus协议格式发送给信号收发转换控制器3;b、通过蓝牙数据收发模块13实时接收显示终端1发来的前置摄像头4和后置摄像头5切换、控制等指令并通过第一2.4g射频收发模块12以透传方式发送给信号收发转换控制器3;c、通过第一2.4g射频收发模块12实时接收信号收发转换控制器3发来的辣椒直播机运行工况数据并通过蓝牙数据收发模块13发送给显示终端1进行实时显示;d、通过第一2.4g射频收发模块12实时接收信号收发转换控制器3发来的辣椒直播机前置摄像头4或后置摄像头5视频数据并通过usb数据收发模块14发送给显示终端1进行实时显示。
25.【2】信号收发转换控制器3通过第二2.4g射频收发模块28实时接收遥控器2发来的控制开关组件9状态信息,并根据接收到的数据直接控制整车各执行部件执行或将接收到的数据由sbus格式转换为can1939数据格式发往整车can总线6通过车载其它控制器进一步控制整车各执行部件执行相应动作。车速增加按键15每被按动一次,相应的状态值会由0到1发生一次变化,信号收发转换控制器3监测到该状态值变为1后,即通过执行器驱动模块30控制hst无极变速电动推杆将当前车速值增加0.1km/h,辣椒直播机的车速范围为0km/h~8km/h,当车速值达到8km/h后,继续按动车速增加按键15,辣椒直播机运行速度维持在最高车速8km/h不变;同理,车速减小按键16每被按动一次,当前车速值减小0.1km/h,当车速值减小至0km/h后,继续按下车速减小按键16,辣椒直播机运行速度维持在0km/h不变。转速增加按键17每被按下一次,相应的状态值会由0到1发生一次变化,信号收发转换控制器3监测到该状态值变为1后,即将该状态值转换为can总线信号,发送至整车can总线6,发动机控制器接收相应can数据帧后控制提升发动机转速增加100r/min,发动机转范围为800r/min~2360r/min,当发动机转速增加至2360r/min后,继续按动转速增加按键17,发动机转速维持在最高转速2360r/min不变;同理,转速减小按键18每被按动一次,当前发动机转速减小100r/min,发动机转速减小至800r/min后,继续按动转速减小按键18,发动机转速维持在800r/min不变。转向遥柄19被拨动时输出范围
‑
1000~1000的数值变化量,信号收发转换控制器3监测到该状态值发生变化后,即通过执行器驱动模块30控制辣椒直播机左右电磁比例阀实现辣椒直播机左转、方向不变和右转:当转向遥柄19的输出值为
‑
100~
‑
1000时辣椒直播机左转,左转时数值越小转角越大;当转向遥柄19的输出值为
‑
100~100时辣椒直播机方向不变;当转向遥柄19的输出值为100~1000时辣椒直播机右转,右转时数值越大转角越大。刹车遥柄20被拨动时输出范围
‑
1000~1000的数值变化量,信号收发转换控制器3监测到该状态值发生变化后,即通过执行器驱动模块30控制辣椒直播机实现辣椒直播机点刹和急刹,当转向遥柄19的输出值为0~
‑
1000时辣椒直播机缓慢点刹,点刹可实现辣椒直播机的缓慢刹车,该刹车方式对车辆磨损较小;当转向遥柄19的输出值为
‑
1000~
‑
1时辣椒直播机急刹,急刹可实现辣椒直播机快速刹车,在危急情况下可有效避免事故。机具提升放置三段开关21,输出0、1以及2三个状态,信号收发转换控制器3监测到相应状态值后,即通过执行器驱动模块30控制机具提升电动推杆实现机具的悬浮、提升和下降放置;行驶方向三段开关22,输出0、1以及2三个状态,信号收发转换控制器3监测到相应状态值后,即控制辣椒直播机实现的行驶方向不变、前进和后退;报警喇叭开关23,输出0和1两个状态,信号收发转换控制器3监测到相应状态值后,即通过执行器驱动模块30控制辣椒直播机的报警喇叭不发
声和发声报警;上路模式开关,输出0和1两个状态,信号收发转换控制器3监测到相应状态值后,即控制辣椒直播机执行相应的策略:上路模式中辣椒直播机双闪灯常亮,对来往车辆及行人进行危险提示;入地模式中辣椒直播机双闪灯关闭。
26.【3】信号收发转换控制器3通过第二2.4g射频收发模块28实时接收遥控器2发来的前置摄像头4和后置摄像头5切换、控制命令,并通过视频切换控制模块29进一步控制前置摄像头4和后置摄像头5执行相应动作:如果收到切换显示前置摄像头4视频命令,则信号收发转换控制器3进一步控制视频切换控制模块29采集前置摄像头4视频信号并上传至显示终端1进行显示;如果收到切换显示后置摄像头5视频命令,则信号收发转换控制器3进一步控制视频切换控制模块29采集后置摄像头5视频信号并上传至显示终端1进行显示;如果收到摄像头向上、向下、向左以及向右控制命令,则信号收发转换控制器3进一步控制视频切换控制模块29控制当前摄像头向上、向下、向左以及向右转动,保证在辣椒直播机运行过程中实时监测周边环境情况,为遥控人员提供更宽视角,避免固定式摄像头视角过小的问题。
27.【4】辣椒直播机运行过程中:信号收发转换控制器3通过can总线模块31采集发动机转速、燃油率、机油压力、水温、油水分离状态、空滤报警状态以及燃油位等参数;通过第二数据采集模块26实时采集车载陀螺仪输出的辣椒直播机车身航向角、侧倾角以及俯仰角等参数;实时计算辣椒机当前车速、转向状态、刹车状态、行驶状态、机具提升状态、报警状态以及上路状态等参数。之后,将采集到的数据按照固定格式打包处理,通过第二2.4g射频收发模块28发送给遥控器2,经遥控器2进一步转发给显示终端1,显示终端1对接收到的工况数据进行实时处理显示。
28.【5】辣椒直播机运行过程中:显示终端1经由遥控器2定时向信号收发转换控制器3发送2.4g无线链路及蓝牙监测数据链路通断状态数据包。信号收发转换控制器3收到该数据包即可向显示终端1回应2.4g无线链路及蓝牙监测数据链路通断状态应答数据包。如果信号收发转换控制器3在规定时间内未收到2.4g无线链路及蓝牙监测数据链路通断状态数据包,即认为当前辣椒直播机处于非受控状态并控制辣椒直播机进行急刹车同时驱动报警喇叭报警。如果显示终端1在规定时间内未收到2.4g无线链路及蓝牙监测数据链路通断状态应答数据包即向遥控人员弹出无线数据链路中断报警提示框。
29.本发明通过对遥控器和信号收发转换控制器中各个模块的设置,以较低成本实现对辣椒直播机远距离稳定可靠控制,使得农民朋友们足不入地即可实现辣椒规模种植,满足了农户朋友们的迫切需求。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1