一种基于黎曼度量的航天器故障检测方法与流程
1.本发明涉及一种基于黎曼度量的航天器故障检测方法,属于故障诊断技术领域。
背景技术:
2.现随着现代工业的不断规模化和复杂化,实时故障检测技术对于工业过程安全及其产品质量把控有着重要的作用。常用的故障检测算法分为以下三类:基于模型的方法,基于知识的方法和基于数据的方法。由于现代工业中分布式系统的应用,工业数据库中存储了丰富的过程数据,相比于其他方法,基于数据的方法有着更大的优势。
3.基于数据的故障诊断系统大多针对的是静态系统,主要包含主成分分析(principle component analysis,pca)、偏最小二乘(partial least squares,pls)、独立成分分析(independent component correlation algorithm,ica)。其中pca和pls的研究最为广泛,工程中也有着不同的应用。
4.对于数据驱动的非线性系统故障诊断方法,基于神经网络的pca和核pca(kpca)有着重要的应用,其中kpca是将数据投影到高维空间,使得低维空间的非线性问题转化为高维空间的线性问题,kpca目前是非线性过程最为重要的检测方法。
5.在动态系统中,无论系统是处于稳态还是瞬态,过程动态的状态空间模型能够很好的描述关键质量标准和过程变量之间的关系。通过使用奇偶性空间或诊断观察器的残差生成器来实现过程监测。
6.对于多模态系统的故障检测,一些基于线性系统的故障检测方法改进后的诊断方案被提出,如多路pca方法等。针对多模态系统改进的pca和pls方法,在应用多元统计分析方法时存在着去均值中心化、分布概率依赖、乘性故障难识别等问题。同时,由于多模态系统的复杂,使得欧几里得空间中统计量指标下的不同模态与故障数据难以区分。
技术实现要素:
7.本发明解决的技术问题是:为了解决复杂工业过程采样数据的均值和方差非恒定、概率密度函数难获取、故障种类复杂问题,提出一种基于黎曼度量的航天器故障检测方法。
8.本发明解决技术的方案是:
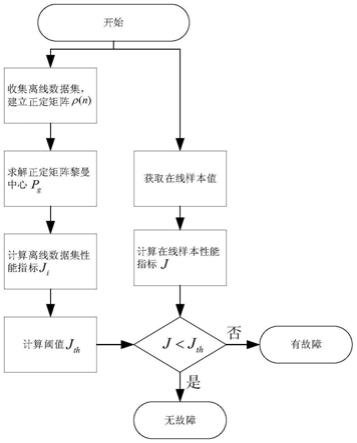
9.一种基于黎曼度量的航天器故障检测方法,具体步骤包括:
10.步骤一:在无故障情况下,收集n组离线过程数据{y1,...,y
n
},建立正定矩阵ρ(n)=[p1,...,p
n
];
[0011]
步骤二:通过迭代求解方法,计算出正定矩阵[p1,...,p
n
]的黎曼中心p
g
;
[0012]
步骤三:依次计算离线过程数据对应的性能指标j
i
,通过阈值设定算法,计算阈值j
th
;
[0013]
步骤四:获取在线样本值,计算在线样本值的性能指标j,将j与步骤三得出的阈值j
th
相比较,若j≥j
th
故障报警,若j<j
th
则无故障。
[0014]
进一步的,步骤一中,y
i
=[y
i
(1),...,y
i
(n)]∈r
m
×
n
,i=1,..,n,表示第i个记录的过程数据,n为一组数据的采样数,m为测量向量的维数。
[0015]
进一步的,步骤一中,
[0016]
进一步的,步骤一中,p、q为两个m
×
m维的正定矩阵,d
r
(p,q)即为黎曼度量下的黎曼距离。
[0017]
进一步的,
[0018][0019]
其中,log()代表着矩阵对数,λ
i
(p,q),i=1,...,m为p
‑1q的特征值,正定矩阵p和q之间的黎曼距离表征着两个矩阵的相似度。
[0020]
进一步的,步骤三中,通过阈值设定算法,计算阈值j
th
。
[0021]
进一步的,步骤四中,获取在线样本值y=[y(1),...,y(n)]∈r
m
×
n
,根据进行数据标准化,获得标准化后的数据
[0022]
计算获得数据矩阵
[0023]
计算在线样本值的性能指标将j与步骤三得出的阈值j
th
相比较,若j≥j
th
故障报警,若j<j
th
无故障。
[0024]
本发明与现有技术相比的有益效果是:
[0025]
(1)本发明基于批数据矩阵检测故障,该矩阵涵盖了均值、协方差和不确定信息,采用黎曼中心,可以有效处理不确定性;
[0026]
(2)本发明比传统基于统计量的故障检测算法可检测的故障种类多;
[0027]
(3)本发明不需要假设过程数据的分布情况,为纯数据驱动算法,可适用性更广。
附图说明
[0028]
图1为基于黎曼度量的故障检测算法流程图;
[0029]
图2为黎曼中心迭代求解算法图;
[0030]
图3为阈值设定算法流程图。
具体实施方式
[0031]
下面结合实施例对本发明作进一步阐述。
[0032]
参照图1和图2具体说明本实施方式,本实施方式所述的基于黎曼度量的故障检测算法,该方法包括以下步骤:
[0033]
步骤一:在无故障情况下,收集足够大的n组离线过程数据集{y1,...,y
n
},其中y
i
=[y
i
(1),...,y
i
(n)]∈r
m
×
n
,i=1,..,n,表示第i个记录的过程数据,n为一组数据的采样数,m为测量向量的维数。由于该算法基于黎曼度量,因此建立正定矩阵[p1,...,p
n
],如式(1.1)所示:
[0034][0035]
步骤二:计算出正定矩阵ρ(n)=[p1,...,p
n
]的黎曼中心p
g
,如式(1.2)所示:
[0036][0037]
p、q为两个m
×
m维的正定矩阵,d
r
(p,q)即为黎曼度量下的黎曼距离,其定义如式(1.3)所示:
[0038][0039]
式(1.3)中log(
·
)代表着矩阵对数,λ
i
(p,q),i=1,...,m为p
‑1q的特征值。正定矩阵p和q之间的黎曼距离表征着两个矩阵的相似度;
[0040]
步骤三:依次计算离线过程数据对应的性能指标j
i
,如下式所示:
[0041][0042]
通过阈值设定算法,计算阈值j
th
;
[0043]
步骤四:获取在线样本值y=[y(1),...,y(n)]∈r
m
×
n
,根据公式进行数据标准化,获得标准化后的数据计算获得数据矩阵计算在线样本值的性能指标将j与步骤三得出的阈值j
th
相比较,若j≥j
th
故障报警,否则j<j
th
无故障。
[0044]
具体实施方式二:本实施方式是对具体实施方式一所述的基于黎曼度量的故障诊断算法作进一步说明,本实施方式中,由于步骤二中多个正定矩阵的黎曼中心p
g
求解较为困难,给出如下迭代求解的方法:
[0045]
表1黎曼中心迭代求解算法
[0046][0047]
具体实施方式三:本实施方式是对具体实施方式一所述的基于黎曼度量的故障诊断算法作进一步说明,本实施方式中,如图3所示,步骤三中阈值设定算法的具体步骤如下:
[0048]
根据监测指标j的公式,离线正定矩阵集p
i
与黎曼中心p
g
之间的监视指标j
i
(i=1,...,n)可以写作令n0满足
[0049][0050]
其中,α是可接受的误报率(false alarm rate,far)。
[0051]
表2阈值设定算法
[0052]
[0053]
本发明提出了在无故障情况下,航天器离线过程数据集建立和黎曼中心计算方法。利用历史离线数据集,处理成可用于黎曼度量计算的正定矩阵集合;利用正定矩阵集合求解黎曼中心,为了解决黎曼中心求解困难的为题,给出了求解黎曼中心的迭代方法;
[0054]
本发明提出了航天器在线样本值的数据标准化和阈值设置方法。计算离线数据相对应的数据指标,并给出了阈值设定算法计算得到离线数据的阈值;实际应用时,通过采集在线数据,对在线数据预处理,并计算出其性能指标;利用在线数据的性能指标与设定的阈值比较可判断出当前在线数据是否存在故障。
[0055]
本发明基于批数据矩阵检测故障,该矩阵涵盖了均值、协方差和不确定信息,采用黎曼中心,可以有效处理不确定性。黎曼度量框架下的多模态非线性系统故障检测中,正定矩阵流行相当于向量空间的高维空间,能够解决传统的基于向量方法无法检测到的故障。
[0056]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1