具有自我恢复的现场设备的制作方法
具有自我恢复的现场设备
1.本技术是申请号为pct/in2014/000638的pct国际申请(申请日为2014年9月30日)的中国国家阶段申请cn201480065025.8(发明名称为“具有自我恢复的现场设备”)的分案申请。
技术领域
2.本技术涉及过程控制领域,具体地涉及具有自我恢复的现场设备。
背景技术:
3.(例如在化学、石油或其它过程中使用的)过程控制系统通常包括集中式过程控制器,该集中式过程控制器经由模拟总线、数字总线或者组合的模拟/数字总线通信耦合到至少一个主机或操作者工作站并且耦合到一个或多个现场设备。现场设备(其可以是例如阀门、阀门定位器、开关以及变送器(例如温度、压力和流率传感器))执行过程中的功能(例如开启或关闭阀门以及测量过程参数)。过程控制器接收指示现场设备进行的过程测量的信号和/或与现场设备有关的其它信息,使用该信息来实现控制例程,并然后产生在总线上向现场设备发送以控制过程的操作的控制信号。来自现场设备和控制器的信息通常可以被由操作者工作站执行的一个或多个应用使用,以使操作者执行与过程有关的任何期望的功能,例如查看过程的当前状态,修改过程的操作等。
4.在过去,传统现场设备被用于经由模拟总线或模拟线路来向过程控制器发送模拟(例如4至20ma)信号并且从过程控制器接收模拟信号。这些4至20ma信号实际上受到限制,因为它们指示设备进行的测量,或者是控制器产生的对设备的操作进行控制所需要的控制信号。然而,最近,智能现场设备(包含微处理器或类似的组件的现场设备)在过程控制工业中已经变得流行。除了执行过程中的主要功能以外,智能现场设备存储与设备有关的数据,与控制器和/或其它设备以数字格式或组合的数字和模拟格式来通信,并且执行次级任务,例如自我校准、识别、诊断等。已经开发出了多个标准和开放通信协议(例如,高速通道可寻址远程传感器foundationtm现场总线、can协议)以能够在相同的过程控制网络中一起使用由不同制造者制造的智能现场设备。
5.一个额外的过程通信协议是由现场总线基金会颁布的、被称作foundation
tm
总线的全数字双线总线协议(下文中被称作“现场总线”)。现场总线协议使用位于不同现场设备的功能块以执行在集中式控制器中之前执行的控制操作。具体地,每个现场总线现场设备能够包括并且执行一个或多个功能块,该一个或多个功能块中的每个功能块从其它功能块(在同一个现场设备中或在不同的现场设备中)接收输入并且/或者向其它功能块提供输出,并且执行一些过程控制操作,例如测量或检测过程参数,控制设备或执行控制操作,例如实现比例
‑
积分
‑
微分(pid)控制例程。过程控制系统中的不同的功能块被配置为(在总线上)相互通信以形成一个或多个过程控制环路。
6.随着智能现场设备的出现,能够迅速诊断并校正在过程控制系统中发生的问题比以往变得更加重要,因为未能成功检测和校正较差地执行的环路和设备导致过程的次优的
性能,这就所生产的产品的质量和数量二者而言可能是代价昂贵的。
7.虽然智能现场设备提供的改进已经显著地提高了过程控制,当这样的现场设备或过程控制环路或段发生错误或需要修理时,其重新配置、问题原因的识别和解决方案可能是耗时的。当现场设备遭受错误情况,过程控制操作者通常必须派遣工人/机械师前往现场设备的物理位置(其可能与控制位置相距上百或甚至上千米远),并且识别现场设备的合适的恢复方法。在一些实例中,过程控制操作者甚至可能需要呼叫现场设备的制造商,以接收对识别问题和/或实现合适的恢复方法的支持。因此,在现场设备中发生的简单地错误状况仍然可以消耗大量的过程控制操作者和/或机械师时间来修正。
技术实现要素:
8.一种现场设备,包括控制器和过程通信模块。控制器被配置为执行与过程控制有关的至少一个操作,并且还被配置为执行与现场设备有关的至少一个自我恢复操作。过程通信模块耦合到控制器,并且被配置为耦合到过程通信段并根据过程通信协议来通信。控制器被配置为检测错误状况,并且响应于检测到的错误状况来选择性地应用所述至少一个自我恢复操作。
附图说明
9.图1是本发明的实施例能够应用的过程控制和监视系统的概略视图。
10.图2a是通过主机与操作者交互以便执行传统的错误恢复方法的现场设备的概略视图。
11.图2b是示出了通过主机与现场设备交互以便实现参照图2a说明的错误恢复方法的操作者的活动示意图。
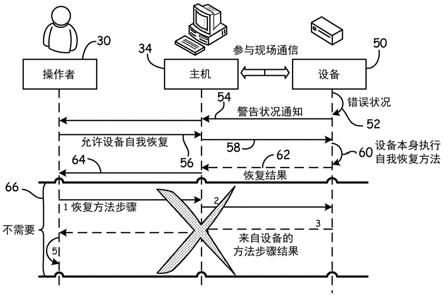
12.图3a是与执行根据本发明的实施例的自我错误恢复方法的现场设备交互的操作者的概略视图。
13.图3b是根据本发明的实施例的与执行参照图3a说明的自我恢复方法的现场设备交互的操作者的活动示意图。
14.图4是根据本发明的实施例的具有被配置为执行一个或多个自我恢复操作的控制器的现场设备的框图。
15.图5是根据本发明的实施例的用于现场设备执行自我恢复的方法的流程图。
具体实施方式
16.现在参照图1,过程控制系统10包括过程控制器12,该过程控制器经由输入/输出(i/0)卡26和28连接到具有显示屏14的主机工作站或计算机13(其可以是任何类型的个人计算机或工作站)并且连接到现场设备15
‑
22。控制器12(通过示例的方式,可以是由emerson process management提供的deltav
tm
控制器)经由例如以太网连接通信连接到主机计算机13,并且使用与现场总线协议或者任何其它合适的过程通信协议相关联的任何期望的硬件和软件来通信连接到现场设备15
‑
22。控制器12实现或监督存储在其中或以其他方式与其相关联的过程控制例程,并且与设备15
‑
22和主机电脑13通信以按照任意期望的方式来控制过程。
17.现场设备15
‑
22可以是任意类型的设备,例如传感器、阀门、发射机、定位器等,而i/o卡26和28可以是符合现场总线协议或任意其它合适的过程通信协议的任意类型的i/o设备。在图1中示出的实施例中,现场设备15
‑
22是使用现场总线协议通信在数字总线上向i/o卡28通信的智能现场设备,例如现场总线现场设备。一般来说,现场总线协议是向将现场设备相互连接的双线环路或总线提供标准化物理接口的全数字、串联、双向通信协议。实际上,现场总线协议为过程中的现场设备提供局域网,这可以使这些现场设备能够(使用功能块,例如pid、控制选择器等)在过程设施所分布的位置处执行过程控制功能,并且能够在执行这些过程控制功能之前和之后相互通信以实现总的控制策略。现场总线协议在本领域是已知的,并且在公开、发布的多个文章、小册子和规范中详细描述,上述内容和其它内容可以从总部设在德克萨斯州奥斯汀的非营利组织“现场总线基金会”得到。因此,将不在本文中详细描述现场总线通信协议的大多数细节。
18.控制器12被配置为使用通常被称作功能块的东西来实现控制策略,其中每个功能块是整个控制例程的一部分(例如子例程),并且(经由通信呼叫的链路)结合其它功能块来操作以实现过程控制系统10中的过程控制环路。功能块通常执行输入功能(例如与变送器、传感器或其它过程参数测量设备相关联的输入功能)、控制功能(例如与执行pid、模糊逻辑等控制的控制例程相关联的控制功能)、或者控制一些设备(例如阀门)的操作的输出功能中的一个以执行过程控制系统10中的一些物理功能。当然,存在混合类型的功能块以及其它类型的功能块。功能块可以存储在控制器12中并由控制器12执行,这通常是以下情况:当这些功能块用于标准4
‑
20ma设备和一些其它类型的智能现场设备或与标准4
‑
20ma设备和一些其它类型的智能现场设备相关联,或者可以存储在现场设备本身中并由现场设备本身实现(这是现场总线设备的情况)。虽然本文中使用功能块控制策略提供对控制系统的描述,也可以使用其它常规手段(例如梯形逻辑)来实现或设计控制策略。
19.如上所述,当智能现场设备发生故障时,即使简单的错误也可能消耗大量时间来诊断和校正。就熟练机械师时间的劳动成本而言,这些时间以及系统停机时间特别宝贵。
20.图2a是操作者30经由主机工作站34来与现场设备32交互的概略视图。如图2a所示,主机工作站34和现场设备32中各自通信耦合到过程通信环路36。过程通信环路36根据过程通信协议(例如现场总线)来操作,并且通常适于危险环境中的操作。然而,与传统数据网络相比,过程通信环路或段通常在带宽上稍微受限。当现场设备32具有错误情况时,通常经由主机工作站34通过过程控制环路36向操作者30传送该错误。这可能采取操作者30与现场设备32之间的多个往复通信,如附图标记38所示,以使操作者30获得关于错误的足够的信息,来选择或者通过其他方式获得针对具体错误情况的合适的恢复方法。如上所述,选择和/或获得恢复方法甚至可能需要呼叫现场设备32的制造者的客户服务电话以接收技术支持。一旦识别出恢复方法,操作者30再次经由主机工作站34来对现场设备32进行操作以实现恢复方法。在一些情况下,制造工程师必须出现,以调试非常表面(cosmetic)的配置问题。
21.在图2b的活动图中以图表方式示出了手动恢复过程。具体地,现场设备32最初识别错误状况40,并且向主机工作站34提供警告状况通知,如线42所示。主机工作站34向操作者30提供警告状况通知,如线44所示。然后,操作者30必须确定合适的方法,以从错误状况下恢复,如环路46所示。如上所述,该手动步骤可能消耗操作者30大量的时间,并且可能需
要过程控制系统的一部分或全部下线。一旦识别出合适的恢复方法,操作者30经由主机工作站34发起恢复方法步骤,如线48所示。然后,主机工作站34经由过程通信环路来与现场设备32通信,以实现恢复方法步骤,如线50所示。一旦现场设备32已经执行或以其他方式实现了恢复方法步骤,则将来自该恢复步骤的结果提供回主机工作站34,如虚线52所示。主机工作站34向操作者30提供指示方法步骤结果的信息,如虚线54所示。重复恢复方法步骤,直到恢复方法完成。如可以认识到的,为了实现合适的恢复方法,需要通过带宽受限的过程通信环路或段的大量通信。
22.如图2b所示,操作者必须出面以使用大量的过程通信来在手动过程中解决现场设备32中的错误状况。在现场设备32向操作者30通知错误状况之后,如线42和44所示,操作者重复恢复方法步骤48、50、52和54来解决该状况。
23.图3a是根据本发明的实施例的执行自我恢复方法的现场设备的概略视图。现场设备50经由过程通信环路或段36通信耦合到主机工作站34。如图3b所示,主机工作站34与操作者30通信。当现场设备50遭受到错误状况时,如附图标记52所示,向主机工作站34发送警告状况通知,如线54所示。警告状况通知54可以与关于图2b提供的警告状况通知42相同。然而,警告状况通知还可以包括指示现场设备50被配置为执行与警告有关的自我恢复的信息。然而,本发明的实施例还可以实现为警告状况通知简单地包含警告信息。在这样的实例中,主机工作站34得知或存储指示现场设备50的能力的信息,以执行一个或多个自我恢复操作。因此,当主机工作站34接收到警告状况通知54时,向操作者30发送的通信并不一定指示警告状况,而只是授权现场设备50尝试自我恢复的请求。然后,操作者30可以确定是否允许现场设备50上的一个或多个自我恢复方法。如果操作者不授权现场设备自我恢复,则必须手动执行自我恢复,如之前所进行的。然而,如果操作者允许现场设备尝试自我恢复,如线56所示,主机工作站34经由过程通信来向现场设备50传送该授权,如线58所示。一旦这样进行了授权,现场设备50将尝试一个或多个自我恢复操作,如线60所示。一旦已经完成了该一个或多个自我恢复操作,现场设备50在过程通信环路上向主机工作站34报告恢复结果,如线62所示。然后,主机工作站34向操作者30传送该结果,如线64所示。因此,当现场设备具有自我恢复的能力时,不需要关于图2b说明的并且在括号66中作为参考示出的各种交互。这节省了大量的操作者时间和努力,并且降低了通过带宽受限的过程通信环路或段发送的通信的量。在一些实施例中,自我恢复操作可被实现为现场设备中的功能块。在现场设备在现场总线过程通信段或在profibus过程通信段上进行通信的实施例中特别如此。
24.图4是根据本发明的实施例的现场设备的系统框图。现场设备100可以包括鲁棒的外壳,该鲁棒的外壳允许现场设备100布置在室外,并能够承受住温度、湿度、电磁干扰等气候上的极端情况。现场设备100包括过程通信模块102,过程通信模块102向现场设备100提供根据如上所述的过程通信协议来通信的能力。在图4中示出的实施例中,过程通信模块102被配置为经由导体104、106耦合到有线过程通信环路。在这样的实施例中,电源模块108还可以耦合到导体104、106,使得通过电源模块108,现场设备100可以仅依靠经由过程通信环路接收的电能操作。然而,本发明的实施例还包括通过无线过程通信协议通信的无线现场设备,例如协议(iec62591)。在这样的实施例中,电源模块108可以包括电池和合适的调节电路,用于向现场设备100的组件供电。
25.控制器110耦合到过程通信模块102,并且包括或耦合到非易失性存储器112。非易
失性存储器112存储一个或多个自我恢复例程,当检测到合适的错误状况并授权自我恢复时,控制器110可以调用或以其他方式执行该一个或多个自我恢复例程。在一些实例中,一个或多个恢复操作可以直接存储在指令中,该指令存储在位于控制器110中或耦合到控制器的非易失性存储器112中。然而,恢复操作还可以存储在现场设备100的设备描述中。当出现错误状况时,控制器110将会识别错误状况,并且经由过程通信模块102传输与该错误状况有关的警告。如果控制器110经由过程通信模块102或本地操作者接口接收到对尝试自我恢复错误状况的授权,则查询并执行存储在非易失性存储器112中的一个或多个自我恢复操作。随后,控制器110确定在从错误中恢复时自我恢复方法或操作是否成功,并且经由过程通信模块102来提供对结果的指示。
26.现场设备100可以是任何合适的现场设备,包括过程变量变送器,其可以包括或耦合到在附图标记114处以虚线示出的传感器。备选地或此外,现场设备100可以包括或耦合到一个或多个合适的致动器,如在附图标记116处以虚线示出的。此外,现场设备100可以简单地提供过程变量的本地指示,例如过程变量显示或诊断模块。因此,本发明的实施例适于在过程通信环路上通信的任何现场设备,并且包括控制器,例如控制器110。
27.图5是根据本发明的实施例的在现场设备中执行的自我恢复方法的流程图。方法200开始于方框202,其中,现场设备(例如现场设备100)识别错误状况。一旦发生了该识别,现场设备确定与错误状况相对应的自我恢复方法是否可用。如果在非易失性存储器(例如现场设备的非易失性存储器112)中识别出自我恢复方法,则控制前进到方框206。然而,如果方框204确定不存在可应用于在方框202处识别出的错误状况的恢复方法,则控制前进到方框208,其中操作者被警告必须根据现有技术执行手动恢复。回到方框204,如果非易失性存储器112指示有适合的恢复方法可用于识别出的错误状况,则控制器110产生由过程通信模块102经由过程通信环路或段向操作者发送以确定操作者是否授权自我恢复的通信。如果操作者通过指示自我恢复不被授权向现场设备进行响应,则控制经由线210前进到方框208并且必须手动执行恢复。然而,如果操作者授权自我恢复,控制前进至方框212,其中现场设备的控制器110执行一个或多个自我恢复方法。在一个实施例中,当现场设备尝试自我恢复时,其将进入指定现场设备处于维护中的“停止服务”或“维护”模式。此外,现场设备在恢复方法期间可能需要将自己重新启动,但是在这样的重新启动之前将经由过程通信通知操作者。接下来,在方框214处,如果自我恢复不成功,则控制经由线216前进至方框208,其中操作者必须手动执行恢复方法。然而,如果自我恢复成功,则经由过程通信向操作者报告该成功恢复,并且在方框216处结束方法200。
28.允许现场设备执行自我恢复可以显著降低处理现场设备的错误状况所需要的努力,并且促进迅速的恢复。人们相信,虽然本文中描述的方法可能提高现场设备中的复杂度,本文描述的实施例将会将操作者解决错误状况所需要的努力显著地降低接近95%。虽然通过不需要现场设备的具体授权以执行一个或多个自我恢复操作可以进一步降低操作者交互和努力,为了要求操作者识别自我恢复操作的风险,人们相信这样的授权是重要的。然而,本发明的实施例可以在全自动情形中实现,在全自动情形中,现场设备识别错误状况并自动执行一个或多个自我恢复操作。
29.在一些实施例中,自我恢复操作将在制造期间编程到现场设备中。在这样的实例中,制造者可以得知可能发生错误状况的具体实例,并且针对每个单独的现场设备提供定
制的解决方案。然而,即使在运送现场设备之后,制造者也可以得知可能有用的附加自我恢复操作,这也是可能的。在这样的实例中,本发明的实施例包括,更新现场设备的非易失性存储器,以包括甚至在现场设备的销售或制造之后创建或生成的新的或后续的自我恢复操作。另外,不同的制造者设备可以具有可能兼容或可能不兼容其他制造者的恢复方法的具体恢复方法。
30.下文是根据本发明的实施例的自我恢复操作的示例。例如,可能存在操作者错误配置了现场设备及其级别(scaling)类型的情形。此外,现场设备的制造者可能在制造现场设备的同时已经得知类似的错误。该错误配置将使现场设备产生“停止服务”模式。因此,在控制环路/过程操作期间,现场设备不能在“正常”模式下操作。然而,现场设备中的自我恢复模块可以检测现场设备在“停止服务”模式下操作的原因,并且可用通过将单元和级别变为所期望的值(或制造值)来将现场设备从错误配置恢复。
31.下文是根据本发明的实施例的自我恢复操作的另一个示例。现场设备通常存储过程中所需要的非易失性数据。在一些实例中,实现校验和,以验证存储在非易失性存储器中的数据的完整性。校验和也存储在非易失性存储器中,用于与计算出的校验和进行比较。如果所存储的校验和与计算出的校验和不匹配,则现场设备将检测到错误。这样的错误匹配可以具有多种不同的原因。例如,存储的数据可能已经发生了变化;可能错误地执行了校验和计算,可能在所存储的校验和没有更新的情况下改变了数据等等。根据本文中描述的自我恢复实施例,现场设备可以采取一个或多个恢复活动。现场设备可以包括简单地重新计算所存储的校验和并验证该校验和的重试机制。如果针对小数据块计算校验和并将其存储,则现场设备可以检测非易失性存储器的哪个块出错。如果这是可能的,则现场设备可以通过在非易失性存储器中重写默认的值来解决非易失性存储器错误。同样,在一个实施例中,必须接收针对自我恢复的具体操作者授权。这是重要的,因为对于过程来说,写入数据可能是非常重要的。备选地,非易失性存储器中的数据可以存储在备选位置中,因此允许非易失性存储器具有二级(备份)数据。在非易失性存储器的主要部分中更新数据的任何时间都可实现该备份。当现场设备检测非易失性存储器错误时,现场设备可以切换到该二级存储器。如上所述,如果上述操作不能成功解决错误状况,可以通过主机工作站向操作者发送通知。
32.本发明的实施例特别有助于根据使用功能块的过程通信协议(例如foundation
tm
现场总线协议和profibus协议)来操作的现场设备。然而,本发明的实施例可以通过使用控制器或微处理器并且包括或耦合到合适的非易失性存储器的任何现场设备来实现。
33.虽然已经参照优选实施例对本发明进行了描述,本领域技术人员将会认识到的是,在不脱离本发明的精神和范围的情况下,可以实现形式和细节上的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1